VR仿真划船系统
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及虚拟现实技术领域,尤其涉及一种VR仿真划船系统。
背景技术
虚拟现实(VR)技术是仿真技术的一个重要方向。虚拟现实技术主要包括模拟环境、感知、自然技能和传感设备等方面。随着VR技术的发展,VR体验的逼真效果要求越来越高,VR体验的不同场景也不断增加,目前的划船模拟设备注重于场景内容的渲染,初步完成了划船动作的力反馈及视觉反馈。不足的是对于模拟划船这一运动的实际环境(船在水上)的仿真不够的。
本发明和现有技术相比较,增强了体验者在虚拟环境中模仿真实环境中划船的感受。实现人与划船设备以及与VR设备之间的交互。通过对柔索并联机器人的控制,逼真地模拟了船只在波浪的上下、左右、前后的浮动、摇晃,船只航行中船体的晃动、倾斜。
现有技术问题及思考:
如何解决模拟划船装置体验效果差的技术问题。
发明内容
本发明所要解决的技术问题是提供一种VR仿真划船系统,其通过柔索并联机器人和船等,实现模拟划船装置体验效果好。
为解决上述技术问题,本发明所采取的技术方案是:一种VR仿真划船系统包括柔索并联机器人和船,所述柔索并联机器人包括控制器和柔索传动单元,所述柔索传动单元包括立柱、柔索、设置在立柱上部的滑轮、设置在立柱下部一侧并依次连接的绳盘、减速机和电机,所述柔索的一端与绳盘连接,柔索的另一端向上绕经滑轮后向下与船连接,所述控制器与电机连接并通信,所述电机驱动减速机并带动绳盘转动配合,转动的绳盘带动柔索牵引船移动配合。
进一步的技术方案在于:并联的柔索传动单元形成柔索并联传动单元;所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元,所述第一柔索传动单元包括第一立柱、第一柔索、设置在第一立柱上部的第一滑轮、设置在第一立柱下部一侧并依次连接的第一绳盘、第一减速机和第一电机。
进一步的技术方案在于:所述控制器为单片机或者计算机,所述柔索为钢丝或者纤维制成的柔性的绳索。
进一步的技术方案在于:还包括用于获知船桨划动速度的速度传感器,所述速度传感器与控制器连接并通信。
进一步的技术方案在于:所述船包括船体、船桨和弹性索,所述船桨通过弹性索与船体连接。
进一步的技术方案在于:还包括辅助支撑杆,所述辅助支撑杆与立柱连接并形成用于支撑船的支架。
进一步的技术方案在于:所述柔索并联机器人为三柔索并联机器人,所述柔索传动单元的数量为三个,三个并联的柔索传动单元形成三柔索并联传动单元。
进一步的技术方案在于:所述柔索并联机器人为五柔索并联机器人,所述柔索传动单元的数量为五个,五个并联的柔索传动单元形成五柔索并联传动单元。
进一步的技术方案在于:所述柔索并联机器人为六柔索并联机器人,所述柔索传动单元的数量为六个,六个并联的柔索传动单元形成六柔索并联传动单元。
进一步的技术方案在于:还包括VR眼镜,所述VR眼镜与控制器连接并通信。
采用上述技术方案所产生的有益效果在于:
第一,一种VR仿真划船系统包括柔索并联机器人和船,所述柔索并联机器人包括控制器和柔索传动单元,所述柔索传动单元包括立柱、柔索、设置在立柱上部的滑轮、设置在立柱下部一侧并依次连接的绳盘、减速机和电机,所述柔索的一端与绳盘连接,柔索的另一端向上绕经滑轮后向下与船连接,所述控制器与电机连接并通信,所述电机驱动减速机并带动绳盘转动配合,转动的绳盘带动柔索牵引船移动配合。该技术方案,其通过柔索并联机器人和船等,实现模拟划船装置体验效果好。
第二,并联的柔索传动单元形成柔索并联传动单元;所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元,所述第一柔索传动单元包括第一立柱、第一柔索、设置在第一立柱上部的第一滑轮、设置在第一立柱下部一侧并依次连接的第一绳盘、第一减速机和第一电机。该技术方案,成本较低的情况下,结构较稳固,使用效果较佳。
第三,还包括辅助支撑杆,所述辅助支撑杆与立柱连接并形成用于支撑船的支架。该技术方案,结构更稳固,使用安全性更好。
第四,还包括用于获知船桨划动速度的速度传感器和力度传感器,所述速度传感器和力度传感器与控制器连接并通信。该技术方案,控制器根据获知的船桨划动速度和力度的数据,控制电机工作并相应调整船的状态,体验效果更佳,更真实。
第五,所述船包括船体、船桨和弹性索,所述船桨通过弹性索与船体连接。该技术方案,是船桨的第二种设计方案,提高了体验的难度,提升了趣味性。
第六,还包括VR眼镜,所述VR眼镜与控制器连接并通信。该技术方案,体验效果更佳,结构更合理。
详见具体实施方式部分描述。
附图说明
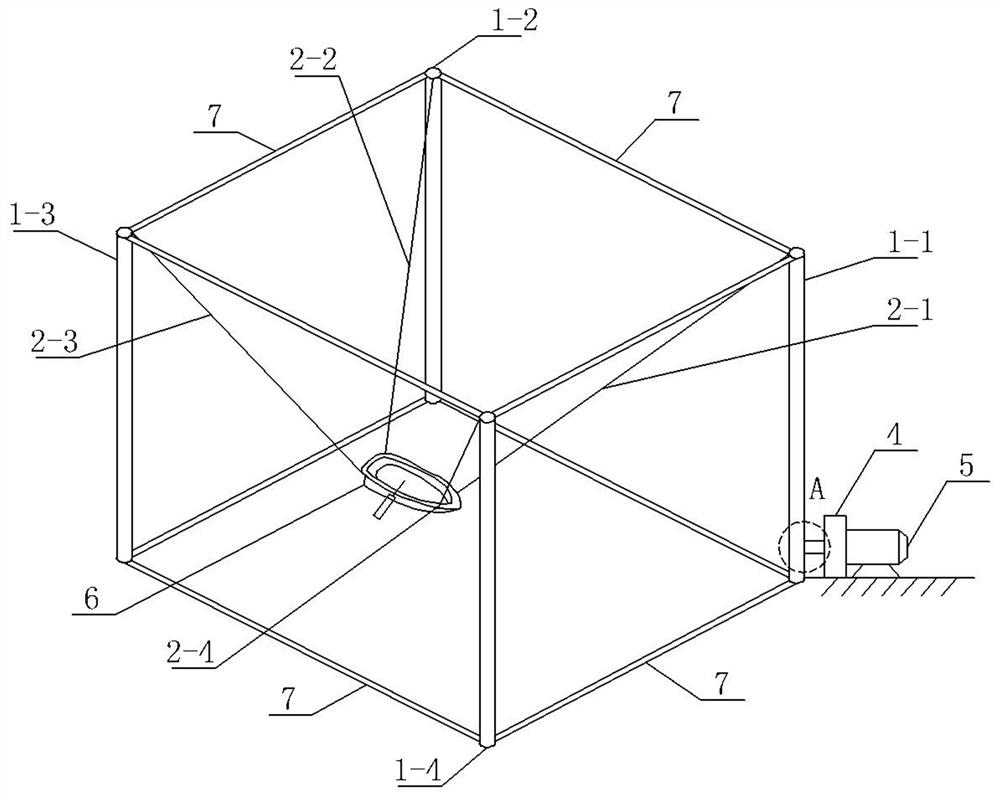
图1是本发明实施例1和实施例2的结构图;
图2是图1的A处放大图;
图3是本发明实施例1的原理框图;
图4是本发明实施例2中摇杆的结构图;
图5是本发明实施例2中船桨的结构图;
图6是本发明实施例2的原理框图;
图7是本发明实施例3中船桨的结构图。
其中:1-1第一立柱、1-2第二立柱、1-3第三立柱、1-4第四立柱、2-1第一柔索、2-2第二柔索、2-3第三柔索、2-4第四柔索、3第一绳盘、4第一减速机、5第一电机、6船、6-1船体、6-2摇杆、6-3第一船桨、6-4第二船桨、6-5弹性索、7支撑杆、8速度传感器。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本申请及其应用或使用的任何限制。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在下面的描述中阐述了很多具体细节以便于充分理解本申请,但是本申请还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本申请内涵的情况下做类似推广,因此本申请不受下面公开的具体实施例的限制。
实施例1:
如图1~图3所示,本发明公开了一种VR仿真划船系统包括柔索并联机器人、船6和辅助支撑杆7,所述柔索并联机器人包括控制器和柔索传动单元,所述控制器为计算机,所述柔索并联机器人为四柔索并联机器人,所述柔索传动单元的数量为四个,分别是结构相同的第一至第四柔索传动单元,四个并联的柔索传动单元形成四柔索并联传动单元。
所述第一柔索传动单元包括第一立柱1-1、第一柔索2-1、固定在第一立柱1-1上部的第一滑轮、固定在第一立柱1-1下部一侧并依次连接的第一绳盘3、第一减速机4和第一电机5,所述第一柔索2-1的一端与第一绳盘3连接,第一柔索2-1的另一端向上绕经第一滑轮后向下与船6的左前部连接,所述计算机的控制端口通过控制设备与第一电机5的控制端口有线连接并单向通信,所述第一电机5驱动第一减速机4并带动第一绳盘3转动配合,转动的第一绳盘3带动第一柔索2-1牵引船6的左前部移动配合。
所述第二柔索传动单元包括第二立柱1-2、第二柔索2-2、固定在第二立柱1-2上部的第二滑轮、固定在第二立柱1-2下部一侧并依次连接的第二绳盘、第二减速机和第二电机,所述第二柔索2-2的一端与第二绳盘连接,第二柔索2-2的另一端向上绕经第二滑轮后向下与船6的左后部连接,所述计算机的控制端口通过控制设备与第二电机的控制端口有线连接并单向通信,所述第二电机驱动第二减速机并带动第二绳盘转动配合,转动的第二绳盘带动第二柔索2-2牵引船6的左后部移动配合。
所述第三柔索传动单元包括第三立柱1-3、第三柔索2-3、固定在第三立柱1-3上部的第三滑轮、固定在第三立柱1-3下部一侧并依次连接的第三绳盘、第三减速机和第三电机,所述第三柔索2-3的一端与第三绳盘连接,第三柔索2-3的另一端向上绕经第三滑轮后向下与船6的右后部连接,所述计算机的控制端口通过控制设备与第三电机的控制端口有线连接并单向通信,所述第三电机驱动第三减速机并带动第三绳盘转动配合,转动的第三绳盘带动第三柔索2-3牵引船6的右后部移动配合。
所述第四柔索传动单元包括第四立柱1-4、第四柔索2-4、固定在第四立柱1-4上部的第四滑轮、固定在第四立柱1-4下部一侧并依次连接的第四绳盘、第四减速机和第四电机,所述第四柔索2-4的一端与第四绳盘连接,第四柔索2-4的另一端向上绕经第四滑轮后向下与船6的右前部连接,所述计算机的控制端口通过控制设备与第四电机的控制端口有线连接并单向通信,所述第四电机驱动第四减速机并带动第四绳盘转动配合,转动的第四绳盘带动第四柔索2-4牵引船6的右前部移动配合。
所述辅助支撑杆7与四个立柱连接并形成用于支撑船6的支架。
所述柔索为钢丝制成的柔性的绳索。
其中,计算机、减速机和电机本身以及相应的通信连接技术为现有技术在此不再赘述。
柔索并联机器人将船6吊起,在计算机的系统控制下,由电机经过减速机,驱动柔索,从而带动船6在限定空间作移动,改变空间位置和姿态。
电机启动后,经过减速机,驱动绳盘,使柔索放开或收回。
实施例2:
实施例2与实施例1不同之处在于,还包括VR眼镜和用于获知船桨划动速度的速度传感器。
如图1、图4~图6所示,本发明公开了一种VR仿真划船系统包括实施例1的系统,还包括VR眼镜和用于获知船桨划动速度的速度传感器8和力度传感器,所述速度传感器8和力度传感器分别通过无线通信装置与计算机无线连接并单向通信,所述VR眼镜与计算机无线连接并通信。
所述船包括船体6-1、摇杆6-2和第一船桨6-3,所述摇杆6-2与船体6-1半圆球连接,所述第一船桨6-3的手柄处开设有圆孔,第一船桨6-3通过圆孔与摇杆6-2套接,所述速度传感器8固定在摇杆6-2与第一船桨6-3的结合处。
其中,计算机、VR眼镜、速度传感器、力度传感器、减速机和电机本身以及相应的通信连接技术为现有技术在此不再赘述。
实施例3:
实施例3与实施例2不同之处在于,船桨设置的第二种方案。
如图7所示,船包括船体、第二船桨6-4和弹性索6-5,所述第二船桨6-4通过弹性索6-5与船体连接。
实施例4:
实施例4与实施例1不同之处在于,所述柔索并联机器人为三柔索并联机器人,所述柔索传动单元的数量为三个,三个并联的柔索传动单元形成三柔索并联传动单元,三条柔索在船的周边上均匀分布。
本申请的技术构思:
这是一款基于柔索并联机器人技术的VR仿真划船系统。它不同于目前市场上已有的各类VR仿真划船系统。现有的VR仿真划船系统,一般都是在刚性支撑的条件下,模拟船在水中的运动和感觉。显然,它是不够接近真实的。
本申请所述的VR仿真划船系统,由于在柔性的支撑下体验船在水中的运动感觉,它能更好的表现水的柔动特性,增强划船体验的真实感。同时实现了体验者和船及虚拟环境的交互。
VR模拟划船系统,现有的设备都是在刚性或有弹性的基座上实现的,这样缺乏在水中的真实感。发明人发现,可以用柔索并联机器人将船吊起来,在柔性的支撑下,船体能更好的表现水的柔动特性和运动的复杂性,从而增强模拟划船体验的真实感。
本申请的技术特点:
一种基于柔索并联机器人和VR技术的模拟划船装置,包括柔索并联机器人、船体、两只船桨和传感器模块、通讯模块和控制器,以及VR眼镜或屏幕。所述船体通过柔索(钢索或纤维索)相连铰接,两只船桨对称设置在船体的两侧,船桨上设置有传感器和通讯模块,体验者面对着屏幕方向。
技术方案说明:
1.本申请的技术方案是由柔索并联机器人、船体、单、双桨+传感器和计算机、通讯系统、主控制器、投影仪(或显示器、VR眼镜)、大屏幕、仿真控制软件共同构成的一个模拟划船运动的VR系统。
2. 本申请的技术方案主要关键特征在于柔索并联机器人和带有传感器的划船单、双桨和船体构成。柔索并联机器人采用三柱或四柱形式,船体上可采用单、双或多桨形式。
3. 本申请的技术方案中柔索并联机器人的主要功能在于通过柔索与船体的铰接,将船体吊起来,可在控制下,实现对船体在空间中位置和姿态的改变。
4. 本申请的技术方案的主要特征还在于划船的桨和船体的连接处装有速度传感器和力度传感器,可以获知划桨的速度和力度。
本申请保密运行一段时间后,现场技术人员反馈的有益之处在于:
与虚拟划船运动相比,本申请构建了柔性的划船环境,使在现实世界中和一般VR划船设备中不可能实现的船体状态和互动。极大地提高虚拟划船运动的复杂性、趣味性和娱乐性,增加更多的趣味内容和竞技内容,使得虚拟划船运动更好地普及。
同时,在相同功能可实现的前提下,成本较低。
- VR仿真划船系统
- 一种结合VR系统的体感划船装置