智能清扫车管理与应用系统
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及智能清扫车技术领域,尤其涉及一种智能清扫车管理与应用系统。
背景技术
随着科学技术的不断发展,扫地机(也称扫地机器人)逐步走入平常百姓家,并被越来越多的人所接受。扫地机器人在执行清扫任务时,都需要进行路径规划,即选择一条安全可行的路径,避免与工作空间的障碍物碰撞,路径规划也是移动机器人的关键技术之一,涉及到了环境地图构建、机器人定位等问题,是现代机器人研究的一个重要方向。
发明内容
本发明所要解决的技术问题是如何提供一种能够提高智能清扫车的用户体验,做到方便简单,多机自动协同作业的系统。
为解决上述技术问题,本发明所采取的技术方案是:一种智能清扫车管理与应用系统,其特征在于包括:
地图构建模块:通过应用程序指定当前在线的一台或多台智能清扫车开始构图,并通过手柄控制正在构图的智能清扫车环绕场地,智能扫地车将通过激光雷达正在构建的地图实时传输到应用程序,当辨识此时的地图,认为场地已经被扫描后,在应用程序中点击结束构图或取消构图,点击结束构图,则上传地图到服务器后构图过程完成;
地图图像处理模块:用于设置障碍物和移除障碍物;
虚拟墙编辑模块:用于在应用程序中通过设置虚拟墙,使智能清扫车不能达到该区域内;
预约清扫任务设置模块:用于设置局部清扫区域和全局清扫区域;
立即清扫任务设置模块:在应用程序中添加一个或多个多边形区域,服务器会自动调度一台或多台智能清扫车清扫该区域;
清扫记录查询模块:用于查看智能清扫车执行任务过程中行走的轨迹;
用户管理模块:用于添加、删除子用户,修改子用户密码、昵称和账号;
设备授权模块:用于给子用户授权或者取消授权设备,已经授权或取消授权设备的某种权限;
服务器调度模块:用于调度一台或多台智能清扫车去执行任务,调度会根据智能清扫车的状态、电量和就近原则;
断点续扫模块:用于在多机协同作业的情况中,如果一台或多台机器在还没完成清扫任务时,出现故障或其他情况导致不能继续作业,此时其他正常作业的机器待作业完成后将会接替未完成机器的未完成清扫的区域。
进一步的技术方案在于,所述移除障碍物的方法如下:
由于激光雷达在扫描整个场地区域时,存在一些移动或临时停放的物品,因此这些物品会被激光雷达扫描并体现在地图中并被视为障碍物不可跨越或达到,由于以上情况的物品具有不固定性,并非被障碍物占据的区域始终不可跨越或不可达到,因此在应用程序中通过编辑地图图像将以上类似障碍物移除。
进一步的技术方案在于,所述设置障碍物的方法如下:
由于场地环境的复杂性,激光雷达扫描形成的地图中可清扫区域不封闭,会导致智能清扫车移动出场地外部,因此在应用程序中通过编辑地图图像将不可达到区域封闭。
进一步的技术方案在于,所述局部区域清扫的方法如下:
在应用程序中添加一个或多个多边形区域;选择至少一个周期;选择执行任务时间;选中以上三点,作为一次任务添加到云服务器,每到该周期的时间节点,则服务器调度电量充足、空闲状态且离目标区域最近的一台或多台智能清扫车执行此次任务。
进一步的技术方案在于,所述全局区域清扫的方法如下:
在应用程序中选择至少一个周期;选择执行任务时间;选中以上两点,作为一次任务添加到云服务器,每到该周期的时间节点,则云服务器调度电量充足、空闲状态且离目标区域最近的一台或多台智能清扫车执行此次任务,覆盖全部可清扫区域。
采用上述技术方案所产生的有益效果在于:本申请所述系统能有效的提高智能清扫车的用户体验,做到方便简单,多机自动协同作业。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明。
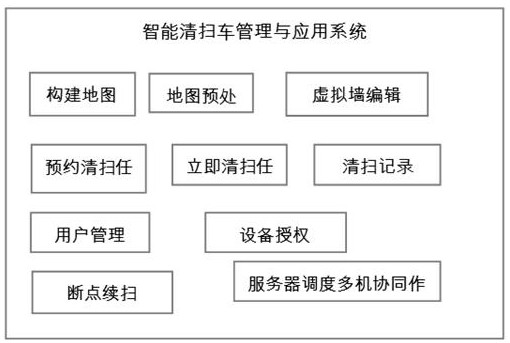
图1是本发明实施例所述系统的原理框图。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
如图1所示,本发明实施例公开了一种智能清扫车管理与应用系统,包括:
地图构建模块:通过应用程序指定当前在线的一台或多台智能清扫车开始构图,并通过手柄控制正在构图的智能清扫车环绕场地,智能扫地车会将通过激光雷达正在构建的地图实时传输到应用程序,当人为辨识此时的地图,认为到场地已经被扫描后,可在应用程序中点击结束构图或取消构图,点击结束构图,则上传地图到服务器后构图过程完成。(应用程序指移动端App或电脑桌面软件)
地图图像处理模块:
移除障碍物:由于激光雷达在扫描整个场地区域时,存在一些移动或临时停放的物品,比如行人、汽车等,因此这些物品会被激光雷达扫描并体现在地图中并被视为障碍物不可跨越或达到。由于以上情况的物品具有不固定性,并非被障碍物占据的区域始终 不可跨越或不可达到,因此在应用程序中通过编辑地图图像将以上类似障碍物移除(黑色障碍物涂抹变为白色)。
设置障碍物:由于场地环境的复杂性,激光雷达扫描形成的地图中可清扫区域不封闭,会导致智能清扫车移动出场地外部,因此在应用程序中通过编辑地图图像将不可达到区域封闭(在不封闭区域画黑色线条)。
禁区设置模块:在应用程序中通过设置禁区(虚拟墙),使智能清扫车不能达到该区域内。
预约清扫任务模块
局部区域清扫:
在应用程序中添加一个或多个多边形区域;选择至少一个周期(周日、周一、周二、周三、周四、周五、周六);选择执行任务时间;选中以上三点,作为一次任务添加到云服务器,每到该周期的时间节点,则服务器调度电量充足、空闲状态且离目标区域最近的一台或多台智能清扫车执行此次任务。
全局区域清扫:
在应用程序中选择至少一个周期(周日、周一、周二、周三、周四、周五、周六);选择执行任务时间;选中以上两点,作为一次任务添加到云服务器,每到该周期的时间节点,则云服务器调度电量充足、空闲状态且离目标区域最近的一台或多台智能清扫车执行此次任务,覆盖全部可清扫区域。
立即清扫模块:
在应用程序中添加一个或多个多边形区域,点击立即清扫,服务器会自动调度一台或多台智能清扫车清扫该区域。
清扫模式:弓字形清扫、沿边清扫
清扫记录查询模块:在应用程序查看任务执行记录,可查看智能清扫车执行任务过程中行走的轨迹。
用户管理模块:管理员可添加、删除子用户,修改子用户密码、昵称、账号等信息。
设备授权模块:管理员可以给子用户授权或者取消授权设备,已经授权或取消授权设备的某种权限。
服务器调度模块:在App提交立即清扫或App已经添加的任务时间节点到达时,云平台会调度一台或多台智能清扫车去执行任务(协同作业),调度会根据智能清扫车的状态、电量、就近等原则。
本申请所述系统能有效的提高智能清扫车的用户体验,做到方便简单,多机自动协同作业。
- 智能清扫车管理与应用系统
- 一种清扫车智能风量控制系统