一种极坐标二维s变换图像局部谱识别方法
文献发布时间:2023-06-19 10:05:17
技术领域
本发明属于图像识别技术领域,涉及一种极坐标二维s变换图像局部谱识别方法。
背景技术
在二维成像的广泛应用问题中,问题的连续表示非常强调在极坐标系中获取和处理傅里叶变换。二维(2D)和三维(3D)成像的许多应用问题都是在连续域中提出的,非常重视在极坐标和球坐标中获得和处理傅里叶变换。然而,对于笛卡尔网格上离散采样数据的连续体思想的转换问题到目前位置还没有非常有效的方法。在现有的文献中,对于极坐标和球面网格的离散傅立叶变换问题,没有确切和快速的解决方法,同时,现有的图像局部谱识别方法不能准确识别图像的方向信息或者能识别方向信息但运算的复杂度太大,在运算的复杂度和精确度之间没有很好的平衡。
发明内容
本发明的目的是提供一种极坐标二维s变换图像局部谱识别方法,解决了现有技术中存在的现有的图像局部谱识别方法不能准确识别图像的方向信息或者能识别方向信息且运算的复杂度太大的问题。
本发明所采用的技术方案是,一种极坐标二维s变换图像局部谱识别方法,按照如下步骤实施:
步骤1,建立极坐标二维s变换模型;
步骤2,建立含有方向信息的待分析图像;
步骤3,利用建立的极坐标二维s变换模型对含有方向性信息的待分析图像进行径向r
本发明的特征还在于,
步骤1具体为:
步骤1.1,对于一个N×N的图像h(u,v)中任一点a(r
步骤1.2,对步骤1.1的结果图像的每一列做阶数为β=sinθ的1维分数傅里叶变换,把变换后的图像移动到相应的位置后,再和二维高斯窗相乘后,做相应的α和β阶的逆分数傅里叶变换,得到极坐标二维s变换模型。
1维分数傅里叶变换为:对于任意给定的标量值ε,离散的1维信号h(n)的1维分数傅里叶变换为:
其中,0≤n≤N-1,N为偶数,i是虚数单位;
相应的位置指的是:对于在H平面内的点H(lcosθ+n,lsinθ+m),经过二维分数傅立叶变换后,在H
二维高斯窗指的是:
步骤2具体为:
在MATLAB中通过以下四个表达式产生四个局部图像A,B,C,D:
把A,B,C,D四个局部图像按照如下的位置组合
A图像是一个极径为
步骤3具体为:
将全局图像放在二维极坐标s变换模型中,假定待识别的局部谱包含的方向信息为:极径r
步骤3.1,设定极径r
步骤3.2,在夹角θ的搜索范围内给定固定的角度θ,在二维极坐标s变换模型的全局图像中在极径r
步骤3.3,根据步骤3.2搜索到的极径r
步骤3.2中在二维极坐标s变换模型的全局图像中在极径r
步骤3.3中在二维极坐标s变换模型的全局图像中在夹角的搜索范围内搜索夹角θ时,根据待识别的局部谱包含的方向信息设定夹角搜索间隔,进行等间隔搜索。
本发明的有益效果是:
本发明的s变换系数从径向和角度二方面可以稀疏选择并可以进行图像局部谱的快速识别,本发明具有速度快、内存需求低、计算精度高的优点,可广泛应用于图像领域。
附图说明
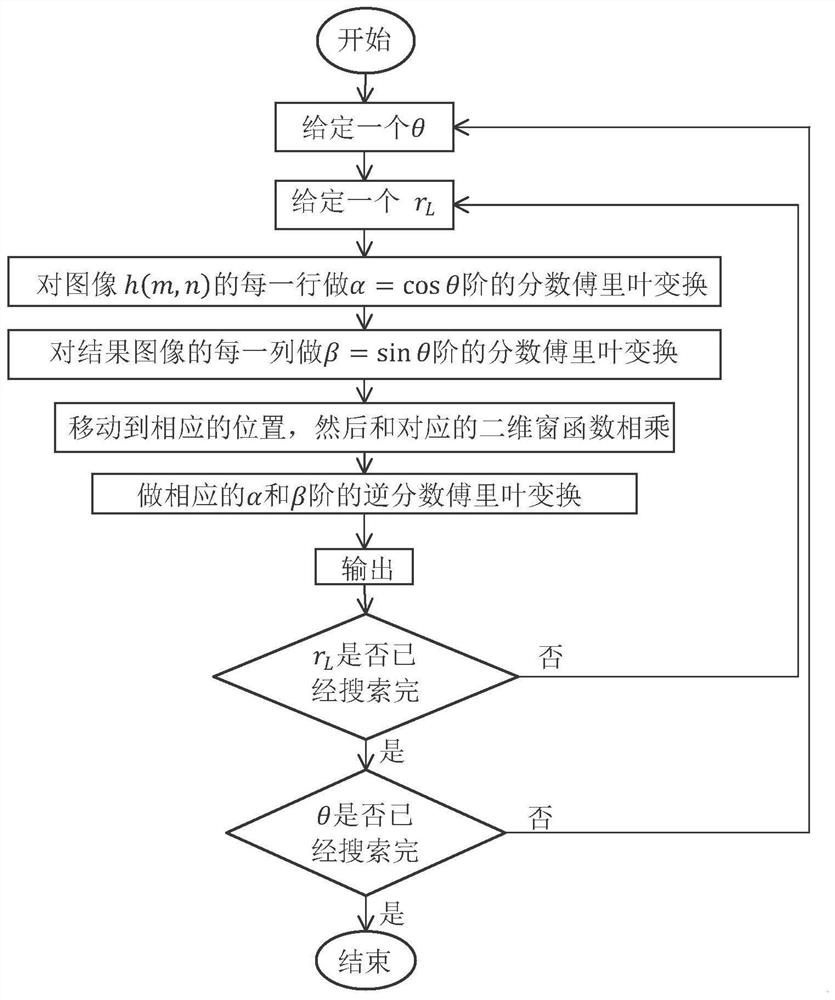
图1为本发明一种极坐标二维s变换图像局部谱识别方法的流程图;
图2为本发明一种极坐标二维s变换图像局部谱识别方法的原理图;
图3为本发明一种极坐标二维s变换图像局部谱识别方法实施例中仿真实验中的代分析的信号;
图4为本发明仿真实验中角度为π/8,极径为77时S变换的谱值;
图5为本发明仿真实验中角度为π/4,极径为90时S变换的谱值。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明一种极坐标二维s变换图像局部谱识别方法,其流程如图1所示,按照如下步骤实施:
步骤1,建立极坐标二维s变换模型;具体为:
步骤1.1,对于一个N×N的图像h(u,v)中任一点a(r
步骤1.2,对步骤1.1的结果图像的每一列做阶数为β=sinθ的1维分数傅里叶变换,把变换后的图像移动到相应的位置后,再和二维高斯窗相乘后,做相应的α和β阶的逆分数傅里叶变换,得到极坐标二维s变换模型,其中,1维分数傅里叶变换为:对于任意给定的标量值ε,离散的1维信号h(n)的1维分数傅里叶变换为:
其中,0≤n≤N-1,N为偶数,i是虚数单位;
相应的位置指的是:对于在H平面内的点H(lcosθ+n,lsinθ+m),经过二维分数傅立叶变换后,在H
二维高斯窗指的是:
步骤2,建立含有方向信息的待分析图像;具体为:
在MATLAB中通过以下四个表达式产生四个局部图像A,B,C,D:
把A,B,C,D四个局部图像按照如下的位置组合
步骤3,利用建立的极坐标二维s变换模型对含有方向性信息的待分析图像进行径向r
如图2所示,将全局图像放在二维极坐标s变换模型中,假定待识别的局部谱包含的方向信息为:极径r
步骤3.1,设定极径r
步骤3.2,在夹角θ的搜索范围内给定固定的角度θ,在二维极坐标s变换模型的全局图像中在极径r
步骤3.3,根据步骤3.2搜索到的极径r
为了对图像进行局部谱的识别,给出了一个局部谱仿真的实验,如图3所示为待分析图像,在MATLAB中通过以下四个表达式产生四个局部图像A,B,C,D:
A=256cos(2π×0.3(x cos(π/8)+y sin(π/8)))
C=256cos(2π×0.3(x cos(π/11)+y sin(π/11)))
B=256cos(2π×0.35(x cos(π/3)+y sin(π/3)))
D=256cos(2π×0.35(x cos(π/4)+y sin(π/4)))
把A,B,C,D四个局部图像按照如下的位置组合
想在全局图像中找到含有方向信息r
当r
想在全局图像中找到含有方向信息r
- 一种极坐标二维s变换图像局部谱识别方法
- 一种基于稀疏双向二维局部判别投影的掌纹图像识别方法