一种工件定心装置、周边磨床及工件定位定心的调整方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及周边磨床设计技术领域,尤其涉及一种工件定心装置、周边磨床及工件定位定心的调整方法。
背景技术
可转位刀片磨床是为航空航天、汽车制造、工程机械、铁路机车等行业和领域设计的机床,可以对不同材质、不同规格、不同形状的刀片进行周边磨削,并能够保持刀片的精度。
刀片通常通过活塞组件中气压推动的方式推送至加工工位,由于机床尺寸较大,活塞杆的长度尺寸也较大,因此活塞杆在推送过程中容易因内部的微小径向间隙导致刀片的定位精度降低,往往需要在活塞杆上增加导向元件,但是现有技术中的导向元件均是简单的轴承密封,并且仅仅布置在活塞杆的端部,导向元件与活塞杆几乎为线接触形式,并不能保证活塞杆轴向上各个点的定位精度,当活塞杆长度尺寸较大时,仍然会产生刀片定位不准的情况,为此,需要设计一种能够精确定位定心的工件定心装置和周边磨床,保证刀片的磨削精度。
发明内容
为了解决现有技术中的周边磨床因活塞杆推送过程中径向位置不稳定,导致刀片的定位精度降低的技术问题,本发明提供了一种工件定心装置、周边磨床及工件定位定心的调整方法来解决上述问题。
本发明提供一种工件定心装置,包括安装底座、转台台面、装夹组件和活塞组件;所述转台台面架设于所述安装底座上、并与所述安装底座转动连接,转台台面的中心设有空腔,所述活塞组件固定于所述空腔内,活塞组件的活塞杆穿过所述空腔、并与所述装夹组件固定连接,活塞杆可作上下进给运动;所述工件定心装置还包括导向组件,所述导向组件沿活塞杆的周向对活塞杆上的多个轴向点或者轴向段进行同心限位,以使活塞杆沿直线运动。
所述多个轴向点或者轴向段是指导向组件与活塞杆的接触面由现有技术中的单一的线接触改进为多个间隔布置的线接触或者柱状的面接触,同时导向组件对活塞杆的中心限位具有同一性和整体性,而不是相互独立的各自中心限位,这样才能保证活塞杆作伸缩运动的径向偏移为零。
进一步的,所述导向组件包括位于所述空腔内部、且套设于所述活塞杆的外周的至少两个第一导向结构,每个所述第一导向结构包括导向单元安装座和套设于所述导向单元安装座和所述活塞杆之间的导套轴承,所述导套轴承对活塞杆上的轴向段进行同心限位;所述导向单元安装座与所述活塞组件的缸体固定连接。
进一步的,所述导套轴承包括轴承本体和滚珠,所述轴承本体的内圆周面沿周向布置有多列相互分隔的滚道槽,每列所述滚道槽内布置有多个滚珠,所述滚珠与活塞杆滚动接触。
进一步的,所述导向组件还包括固定于所述转台台面上方的两个第二导向结构,每个所述第二导向结构包括安装底座和带柄导向轴承,两个所述第二导向结构的所述带柄导向轴承沿Y轴相对布置于所述活塞杆的周向两侧、并与所述活塞杆滚动接触。
进一步的,所述活塞杆上设有与所述带柄导向轴承接触配合的铣扁面,所述铣扁面的长度大于所述活塞杆进给的行程。
进一步的,所述装夹组件包括与所述活塞杆连接的定位座和与所述定位座固定的V型块,所述V型块的顶部具有适于装夹工件的V型开口;所述V型块上还设有腰型孔,所述腰型孔沿上下方向延伸,螺钉穿过所述腰型孔使所述V型块与定位座固定连接。
进一步的,所述定位座与所述活塞杆之间还连接有微调单元,所述微调单元包括微调安装座和楔形定位块,所述定位座的底部设有燕尾槽,所述燕尾槽沿X轴贯通延伸,所述微调安装座的顶部设有单边燕尾凸台,所述单边燕尾凸台和楔形定位块并排布置且共同夹设于所述燕尾槽内。
进一步的,所述工件定心装置还包括行程测量单元,所述行程测量单元包括与所述活塞杆的底部固定连接的发信杆、以及与所述安装底座固定连接的第一光电开关和第二光电开关;所述发信杆上设置有第一发信凸台和位于所述第一发信凸台下方的第二发信凸台,当所述第一发信凸台触发所述第一光电开关时,所述活塞杆到达下极限位置;当所述第二发信凸台触发所述第二光电开关时,所述活塞杆到达上极限位置。
本发明还提供一种周边磨床,包括以上所述的工件定心装置、以及固定于所述转台台面上的工件夹紧单元,所述工件夹紧单元具有定位端夹紧顶尖和夹紧端夹紧顶尖,定位端夹紧顶尖和夹紧端夹紧顶尖之间为加工工位,所述工件定心装置适于将所述工件运送至所述加工工位。
本发明还提供一种工件定位定心的调整方法,该方法使用以上所述的周边磨床,包括以下几个步骤:
S1:利用活塞组件将工件沿活塞杆的轴向推送至加工工位。
S2:水平旋转转台台面,调整工件的角度。
S3:夹紧端夹紧顶尖夹紧工件,工件装夹完毕。
本发明的有益效果是:
(1)本发明所述的工件定心装置,将工件放置在装夹组件上,并通过导向组件对活塞杆限位,且导向组件作用于活塞杆上的多个轴向点或者轴向段,因此导向组件对活塞杆的限位沿轴向延展,保证活塞杆在轴向上的任何部位都不会产生径向偏差,从而使位于活塞杆末端的刀片定位精准,提高加工精度。
(2)本发明所述的工件定心装置,所述导向组件为设置于空腔内的至少两个第一导向结构,第一导向结构沿活塞杆的轴向分段起作用,用于弥补空腔内活塞杆的径向间隙。
(3)本发明所述的工件定心装置,所述第一导向结构通过长条形的滚道槽和位于滚道槽内的多个滚珠实现第一导向结构与活塞杆的滚动接触,第一导向结构与活塞杆之间为柱状表面接触,对活塞杆上的某个轴段进行限位,能够有效避免活塞杆弯曲,并且相邻滚道槽相互分隔,每个滚柱可以在各自的滚道槽内循环滚动,降低结构的运动噪音。
(4)本发明中的导向组件还包括第二导向结构,第二导向结构位于转台台面的上方,在活塞杆上靠近刀片安装部位的端部对活塞杆进一步限位。
(5)本发明中还设置有微调单元,所述微调单元对工件的位置在X轴进行微调,微调单元与第二导向结构共同配合,使工件的水平定位更加精准。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1是本发明所述的工件定心装置的立体图;
图2是本发明所述的工件定心装置的俯视图;
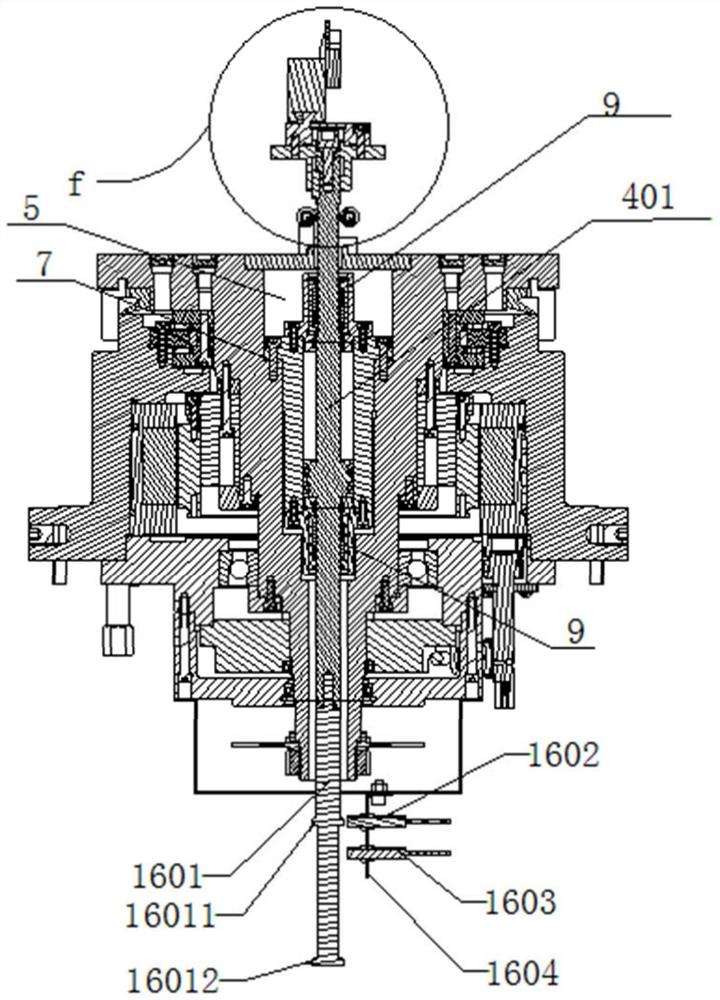
图3是图2的B-B向剖视图;
图4是图3的f处放大图;
图5是本发明中活塞组件的俯视图;
图6是图5的D-D向剖视图;
图7是图5的E-E向剖视图;
图8是图6的g处放大图;
图9是图6的F-F向剖视图;
图10是本发明所述周边磨床的俯视图;
图11是本发明所述周边磨床的主视图;
图12是图10中a处放大图;
图13是图11中b处放大图;
图14是图10的A-A向剖视图;
图15是图14中c处放大图;
图16是图14中d处放大图;
图17是图14中e处放大图。
图中,1、安装底座,2、转台台面,3、装夹组件,301、定位座,3011、燕尾槽,3012、螺纹孔,302、V型块,303、腰型孔,304、微调安装座,3041、单边燕尾凸台,305、楔形定位块,306、过渡连接座,307、定位销组件,308、第三螺钉,309、定位平键,310、第四螺钉,4、活塞组件,401、活塞杆,4011、铣扁面,402、缸体,403、上腔,404、上腔进气通道,405、上腔进气管接头,406、下腔,407、下腔进气通道,408、下腔进气管接头,5、空腔,6、工件,7、第一螺钉,8、第二螺钉,9、第一导向结构,901、导向单元安装座,902、导套轴承,9021、轴承本体,9022、滚珠,9023、滚道槽,903、O型密封圈,904、滑动密封圈,905、孔用弹性挡圈,10、第二导向结构,1001、导向底座,10011、腰形安装孔,1002、带柄导向轴承,11、转子,12、定子,13、转台主支撑轴承,14、辅助支撑轴承,15、角度编码器,16、行程测量单元,1601、发信杆,16011、第一发信凸台,16012、第二发信凸台,1602、第一光电开关,1603、第二光电开关,1604、光电开关安装支架,17、工件夹紧单元,1701、定位端夹紧顶尖,1702、夹紧端夹紧顶尖,1703、定位推杆,18、位置在线检测单元,1801、检测传感器,1802、安装支架,1803、限位锁紧螺母,1804、导向支撑支架。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,所述Z轴是指与用于工件6定心的活塞组件4中活塞杆401的伸缩方向平行的方向,其中活塞杆401伸出时的运动方向为Z轴正向,所述Y轴是指与工件夹紧单元17中定位端夹紧顶尖1701和夹紧端夹紧顶尖1702的伸缩方向平行的方向,其中夹紧端夹紧顶尖1702向定位端夹紧顶尖1701靠近的方向为Y轴正向,所述X轴是指同时垂直Y轴和Z轴的方向。
另外,本发明中所述工件6是指待磨削的刀片。
实施例一:
一种工件定心装置,如图1、图2所示,包括安装底座1、转台台面2、装夹组件3和活塞组件4;转台台面2架设于安装底座1上、并与安装底座1转动连接,转台台面2的中心设有空腔5,活塞组件4固定于空腔5内,活塞组件4的活塞杆401穿过空腔5、并与装夹组件3固定连接,活塞杆401可作上下进给运动;工件定心装置还包括导向组件,所述导向组件沿活塞杆401的周向对活塞杆401上的多个轴向点或者轴向段进行同心限位,以使活塞杆401沿直线运动。
安装底座1为固定结构,转台台面2为转动部件,转台台面2在水平表面内旋转,当转台台面2旋转时,装夹组件3和活塞组件4同步旋转,装夹组件3与活塞杆401连接,当活塞杆401作升降运动时,装夹组件3同步升降,即装夹组件3可以进行上下升降和水平旋转两个运动。
工件6沿Z轴的运动由活塞组件4实现,活塞组件4的具体结构和工作原理如下:如图5-图7所示,转台台面2中心的贯通内孔为空腔5,活塞组件4由缸体402和活塞杆401组成,缸体402的外圆定位在所述贯通内孔中、并通过第一螺钉7固定连接,活塞杆401的外圆定位与缸体402的内孔中,可在其上下滑动进给。缸体402的中心为工作腔体,缸体402的两端具有适于通入压缩气体的上腔进气通道404和下腔进气通道407,活塞杆401中部的凸肩在缸体402内部将所述工作腔体分隔为互不连通的上腔403和下腔406,上腔进气通道404与连通,下腔进气通道407与下腔406连通,上腔进气通道404在缸体402的上端连接有上腔进气管接头405和下腔进气管接头408。
如图4、图6、图7所示,当下腔进气管接头408通入高压气体时,高压气体通过下腔进气通道407进入下腔406,高压气体推动活塞杆401向上进给,活塞杆401带动与之固定连接的装夹组件3一起向上进给,于是定位在装夹组件3上的工件6向上进给,直至到达加工工位。
如图4、图6、图7所示,当上腔进气管接头405通入高压气体时,高压气体通过上腔进气通道404进入上腔403,压力气推动活塞杆401向下进给,活塞杆401带动与之固定连接的装夹组件3一起向下进给,于是定位在装夹组件3上的工件6向下进给,直至脱离加工工位。
本实施方式中,转台台面2与安装底座1配合形成工件角度定位组件,工件角度定位组件实际上是一个力矩电机直接驱动的数控转台,如图14、图16所示,转台台面2由力矩电机的转子11和定子12提供驱动动力,转台台面2通过转台主支撑轴承13和辅助支撑轴承14支撑在安装底座1上,通过角度编码器15在线测量和反馈转台台面2的角度位置,力矩电机的冷却套用来对力矩电机进行冷却,控制其温升。由于转台台面2采用力矩电机直接驱动,属于零间隙传动驱动,并采用高精度的角度编码器15来测量和反馈转台台面2的角度,因此转台台面2的角度定位精度非常高。
所述导向组件包括位于空腔5的内部、且套设于活塞杆401的外周的至少两个第一导向结构9,每个第一导向结构9包括导向单元安装座901和套设于导向单元安装座901和活塞杆401之间的导套轴承902,导套轴承902对活塞杆401上的轴向段进行同心限位;导向单元安装座901与活塞组件4的缸体402固定连接。所述轴向段的同心限位是指导套轴承902与活塞杆401的接触面为环形柱状接触面,从而实现对活塞杆401上的轴段的连续限位,通过导套轴承902的整体性设计,使导套轴承902的中心沿活塞杆401的轴向延伸,从而实现同心限位。
导套轴承902可以但不仅限于采用如下结构:导套轴承902包括轴承本体9021和滚珠9022,轴承本体9021的内圆周面沿周向布置有多列相互分隔的滚道槽9023,每列滚道槽9023内布置有多个滚珠9022,滚珠9022与活塞杆401滚动接触。
本实施方式中,如图3-图8所示,第一导向结构9设置有两个,分别固定于缸体402的上下两端,导套轴承902固定于导向单元安装座901的内孔中,导套轴承902中含有圆周方向均布的多列可循环滚动的滚珠9022(通常为4列或6列,本实施方式中为4列),每一列滚珠9022都有自己独立的滚道槽9023、并于与另外的几列滚珠9022相互隔离开,互相不产生影响。在活塞杆401上下进给时,轴承本体9021的内孔并不与活塞杆401的外圆直接接触,只有滚珠9022与活塞杆401的外圆滚动接触,既能保证活塞杆401上下进给时被准确导向,又可以降低活塞杆401上下进给的摩擦阻力,使导向工作准确、顺畅,同时又能提高第一导向结构9和活塞组件4的使用寿命。第一导向结构9分别设置在缸体402的上下两侧,使两个第一导向结构9跨距加大,提升导向效果和导向精度。在每个导套轴承902中,均布设置多列滚珠9022,可以使第一导向结构9导向时具有自定心功能,使第一导向结构9的轴心始终与活塞杆401的中心轴同心,从而提升导向精度。
下面以位于缸体402上端的第一导向结构9为例对其结构进行详细描述:如图8、图9所示,导向单元安装座901与缸体402通过第二螺钉8固定连接,轴承本体9021与导向单元安装座901固定连接,滚道槽9023位于轴承本体9021的内周,并且滚道槽9023朝向活塞杆401的一端开口,滚珠9022位于滚道槽9023内,通过滚道槽9023的开口端与活塞杆401接触,每列滚珠9022都有独立的滚道槽9023,与其他滚道槽9023内的滚珠9022互不影响,从而使每列滚珠9022都可以在各自的滚道槽9023内循环滚动,保证中心轴的一致性,另外,由于滚道槽9023为柱状结构,每个滚道槽9023内布满有滚珠9022,因此导套轴承902通过多列滚珠9022与活塞杆401接触,实现对活塞杆401上的某一轴段的中心限位。导套轴承902密封在导向单元安装座901内,导向单元安装座901的下端从缸体402的上方插入内孔、并密封在所述工作腔体的上端,导向单元安装座901的外圆周面与缸体402的内圆周面通过O型密封圈903密封,导向单元安装座901的内圆周面与活塞杆401的外圆周面通过滑动密封圈904密封,导向单元安装座901的上端通过孔用弹性挡圈905轴向顶压在轴承本体9021的顶部。
本实施例中的第一导向结构9可以避免活塞杆401在上下进给定位时,在机床的X轴方向和Y轴方向产生偏差。
实施例二:
在实施例一的基础上,所述导向组件还包括固定于转台台面2上方的两个第二导向结构10,每个第二导向结构10包括导向底座1001和带柄导向轴承1002,两个第二导向结构10的带柄导向轴承1002沿Y轴相对布置于活塞杆401的周向侧面、并与活塞杆401滚动接触。Y轴方向为与夹紧端夹紧顶尖1702的伸缩方向平行的方向,由于定位端夹紧顶尖1701的端面中心为机床的机械零点,因此第二导向结构10可以用于将工件6贴合在定位端夹紧顶尖1701的端面,使其精确定位至机械零点。
如图1、图4所示,两个第二导向结构10分居在活塞杆401的两侧,第二导向结构10通过带柄导向轴承1002与活塞杆401滚动接触,两个导向底座1001沿X轴方向分居在活塞杆401的两侧,每个导向底座1001的一侧安装一个带柄导向轴承1002,两个带柄导向轴承1002沿Y轴方向分居在活塞杆401的两侧,为了提高导向效果,作为优选的,活塞杆401上设有与带柄导向轴承1002接触配合的铣扁面4011,铣扁面4011的长度大于活塞杆401进给的行程。在活塞杆401的上端外圆的两侧设计两个铣扁面4011,两个铣扁面4011的长度要求要稍微大于活塞杆401上下进给的行程,保证带柄导向轴承1002始终与铣扁面4011滚动接触,这样设计既能保证活塞杆401上下进给时被准确导向,又能降低活塞上下进给时引起的摩擦阻力,为了确保带柄导向轴承1002与铣扁面4011接触,在导向底座1001上设有腰形安装孔10011来调节带柄导向轴承1002的前后位置(即在X轴方向上的位置)。与第一导向结构9相比,第二导向结构10是辅助导向单元,第二导向结构10与第一导向结构9共同作用来进一步提高导向精度,避免整个导向单元在上下方向进给定位时在机床的X轴方向产生偏差和在机床的Y轴方向产生偏差。
如图1、图4所示,两个第二导向结构10还有另外一个作用,在活塞杆401受到液压油压力作用上下进给时,对称布置的两个第二导向结构10与活塞杆401上对称设置的铣扁面4011配合,可以在实现轴向滚动导向的同时实现活塞杆401的防转位功能,以防止活塞杆401在轴向进给时圆周方向有转动而影响工件6的定位和夹紧,从而提高导向的精度和导向效果。
实施例三:
在实施例一或者实施例二的基础上,装夹组件3可以但不仅限于采用如下结构:包括与活塞杆401连接的定位座301和与定位座301固定的V型块302,V型块302的顶部具有适于装夹工件6的V型开口;V型块302上还设有腰型孔303,腰型孔303沿上下方向延伸,螺钉穿过腰型孔303使V型块302与定位座301固定连接。V型块302上开设的腰型孔303对V型定位块上下位置进行微量调节。对于工件6角度方向的位置,只要通过转台台面2驱动使工件6与V型块302上朝向定位端夹紧顶尖1701的端面贴合即可保证精度,而对于X轴方向和Z轴方向,由于不同工件6存在微小尺寸偏差,因此需要通过进一步的微调使其精确定位至机械零点。
调节时先通过第一导向结构9将工件6在上下方向进行了初步定位,将工件6推至预定位置,接着测量工件6在上下方向与机床的机械零点之间差值(所述机械零点是指定位端夹紧顶尖1701的端面中心),按照这个差值来微调V型块302使工件6进给到正确的零点位置,使工件6上下位置调节到位。V型块302只有在工件6更换后第一次上下方向定位时需要调整,首次调整好后就不需要再调整V型块302了,之后再次磨削时,上下方向的定位通过活塞组件4自动上下进给就可以了,不需要再人为参与操作了。
对于X轴方向的微调,通过以下结构实现:定位座301与活塞杆401之间还连接有微调单元,微调单元包括微调安装座304和楔形定位块305,定位座301的底部设有燕尾槽3011,燕尾槽3011沿X轴贯通延伸,微调安装座304的顶部设有单边燕尾凸台3041,单边燕尾凸台3041和楔形定位块305并排布置且共同夹设于燕尾槽3011内。定位座301底部的燕尾槽3011为微调安装座304提高调节轨道,同时燕尾槽3011的两侧为倾斜表面,可以向微调安装座304施加压力,起到压紧微调安装座304的作用。所述单边燕尾凸台3041是指单边燕尾凸台3041的一侧为斜面,与燕尾槽3011的一个侧面贴合,单边燕尾凸台3041的另一侧与燕尾槽3011的另一个侧面不贴合。
如图4、图17所示,微调安装座304与活塞杆401通过如下方式连接:微调安装座304的底部设置有过渡连接座306,微调安装座304通过定位销组件307与过渡连接座306的端面定位,再通过第三螺钉308固定连接在过渡连接座306上。过渡连接座306的下方套设在活塞杆401的外周,并且与活塞杆401的外周通过定位平键309定位,接着通过第四螺钉310固定在活塞杆401的上端面。定位座301通过底部贯穿开设的燕尾槽3011和楔形定位块305定位在微调安装座304顶部设置的单边燕尾凸台3041上,在定位座301的顶部设有两个贯穿的螺纹孔3012,两个锁紧螺钉通过这两个螺纹孔3012将楔形定位块305向下抵顶,使楔形定位块305贴合夹紧在燕尾槽3011的导轨面上,从而实现定位座301的定位锁紧。在单边燕尾凸台3041的顶面上设有均匀刻划的刻度尺,通过该刻度尺可以准确读取定位座301沿X轴方向的位置,先测量工件6在X轴方向与机床的机械零点之间的差值,按照这个差值来调节定位座301到正确位置然后锁死锁紧螺钉即可。该微调单元也是在首次调整V型块302位置时使用,之后再次磨削时,不需要再人为操作调整微调单元了。
实施例四:
在实施例一或者实施例二或者实施三的基础上,所述工件定心装置还包括行程测量单元16,行程测量单元16包括与活塞杆401的底部固定连接的发信杆1601、以及与安装底座1固定连接的第一光电开关1602和第二光电开关1603;发信杆1601上设置有第一发信凸台16011和位于第一发信凸台16011下方的第二发信凸台16012,当第一发信凸台16011触发第一光电开关1602时,活塞杆401到达下极限位置;当第二发信凸台16012触发第二光电开关1603时,活塞杆401到达上极限位置。
如图3所示,活塞杆401的下端面设有螺纹孔,行程测量单元16通过发信杆1601顶端的外螺纹定位连接到活塞杆401的下端面。发信杆1601的中部设有第一发信凸台16011、下部设有第二发信凸台16012,与安装底座1固定连接的光电开关安装支架1604上设有第一光电开关1602和第二光电开关1603,且第一光电开关1602位于第二光电开关1603的上方。当活塞杆401向下进给到极限位置时,上方的第一发信凸台16011触发上方的第一光电开关1602,第一光电开关1602向数控系统发送信号,表明活塞杆401到达下极限位置,此时工件6向下退回到预定位置;当活塞杆401向上进给到极限位置时,位于下方的第二发信凸台16012触发下方的第二光电开关1603,第二光电开关1603向数控系统发信,表明活塞杆401到达上极限位置,此时工件6向上进给到预定位置。
实施例五:
一种周边磨床,包括以上所述工件定心装置、以及固定于转台台面2上的工件夹紧单元17,所述工件夹紧单元17具有定位端夹紧顶尖1701和夹紧端夹紧顶尖1702,定位端夹紧顶尖1701和夹紧端夹紧顶尖1702之间为加工工位,所述工件定心装置适于将工件6运送至所述加工工位。
如图10-图14所示,工件夹紧单元17沿X轴方向夹紧工件6,本发明采用的工件夹紧单元17为现有技术,此处不再提供详细附图,仅作简要文字介绍,工件夹紧单元17由位于右侧的定位组件和位于左侧的夹紧组件组成,定位组件包含定位顶杆和定位推杆1703,定位顶杆为固定部件,定位推杆1703的前端穿过定位顶杆,定位推杆1703用来定位带孔的工件6,由气动控制,需要定位时气动换向阀动作,定位推杆1703在气压作用下从定位顶杆的内孔中伸出,不需要定位时气动换向阀反向动作,定位推杆1703在复位弹簧力作用下回退至定位顶杆的内孔中。夹紧组件包含夹紧顶杆、杠杆和液压缸,夹紧顶杆和液压缸分别铰接在杠杆的两端,利用增力杠杆的原理,将液压缸的伸缩运动转化为夹紧顶杆的往复运动,定位端夹紧顶尖1701即为定位顶杆的端部,夹紧端顶尖即为夹紧顶杆的端部,定位端夹紧顶尖1701固定不动,夹紧端夹紧顶尖1702通过液压控制沿Y轴运动。
当工件6有中心孔时,工件定心装置完成工件6的粗定位后(包括角度定位和三个坐标轴方向的定位),定位推杆1703在气动控制下沿着定位顶杆的内孔伸出到工件6的定位孔内完成精确定位,然后夹紧端夹紧顶尖1702在液压作用下夹紧工件6。工件6被夹紧后,活塞杆401在气压控制下退回到下极限位置待命。
当工件6没有中心孔时,工件定心装置完成工件6的定位后,定位推杆在气动控制下沿着定位顶杆的内孔缩回到定位孔内等待,然后夹紧端夹紧顶尖1702在液压作用下夹紧工件6。工件6被夹紧后,活塞杆401在气压控制下退回到下极限位置待命。
为提高定位精度,在本实施例的更进一步设计中,周边磨床上还设置有位置在线检测单元18,所述位置在线检测单元18包括位置检测传感器1801和安装支架1802,如图15所示,位置检测传感器1801的螺纹连接在安装支架1802的孔内,再通过限位锁紧螺母1803锁紧在安装支架1802的外侧,位置检测传感器1801的前端通过导向支撑支架1804导向伸缩,位置检测传感器1801的测头由气动控制,当位置检测传感器1801内通入压力空气时,其测头沿着导向支撑支架1804向前伸出到测量位,当位置检测传感器1801内的气体压力腔卸荷时,其测头在弹簧力作用下复位、并沿着导向支撑支架1804退回至等待位。
位置在线检测单元18可以在线检测工件6以下位置:
1)、工件6在机床左右方向(Y轴方向)所在位置以及与机床的工件6左右方向零点的所在位置的差值。
2)、工件6在机床前后方向(X轴方向)所在位置以及与机床的工件6前后方向零点所在位置的差值。
3)、工件6在上下方向(Z轴方向)所在位置以及与机床的工件6上下方向的零点所在位置的差值。
4)、工件6角度位置所在位置(在水平面内的角度位置)以及与机床角度方向的零点所在位置的差值。
实施例六:
一种工件定位定心的调整方法,该方法使用以上所述的周边磨床,包括以下几个步骤:
S1:利用活塞组件4将工件6沿活塞杆401的轴向推送至加工工位。
S2:水平旋转转台台面2,调整工件6的角度。
S3:夹紧端夹紧顶尖1702夹紧工件6,工件6装夹完毕。
S1的具体操作步骤如下:
活塞组件4的下腔406通入压力空气,活塞杆401向上进给带动定位放置在V型块302内的工件6到工件6的粗定位工位。
S2的具体操作步骤如下:
位置在线检测单元18检测工件6角度位置(机床在水平面内的角度位置)所在位置,并与角度位置的零点进行比较,在数控系统内得到工件6的角度偏差,数控系统根据工件6的角度偏差给工件角度定位组件发出工件6角度调整指令,工件角度定位组件根据指令将工件6角度调整到正确位置,工件角度定位组件调整完毕。
当工件6初次装夹调整时,在经过以上两个步骤后,还需要进行下面的微调步骤:
首先,位置在线检测单元18检测工件6在上下方向所在位置,并与机床的上下方向零点进行比较,在数控系统内得到工件6的上下方向位置偏差,并将偏差值显示在显示器上,然后松开V型块302上的螺钉,上下调整V型块302使刀片与机床的上下位置零点重合。
接着,位置在线检测单元18检测刀片在前后方向(机床X轴方向)所在位置,并与X轴零点进行比较,在数控系统内得到工件6的X轴方向位置偏差,并将偏差值显示在显示器上,然后松开定位座301顶部的锁紧螺钉,根据该偏差数值手动调整工件6前后方向的位置到正确位置。
S3的具体操作过程如下:
首先,检查工件6是否带有中心孔,如果工件6不带中心孔,工件夹紧单元17的定位推杆1703在气动控制下回退到等待位,然后夹紧端夹紧顶尖1702在液压作用下夹紧工件6,工件6被夹紧后,活塞杆401在气压控制下退回到下极限位置待命;如果工件6带有中心孔,工件夹紧单元17的定位推杆1703在气动控制下沿着定位顶杆的内孔伸出到工件6的定位孔内完成精确定位,然后夹紧端夹紧顶尖1702在液压作用下夹紧工件6,工件6被夹紧后,活塞杆401在气压控制下退回到下极限位置待命。
在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本说明书中,对所述术语的示意性表述不一定指的是相同的实施例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例中以合适的方式结合。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种工件定心装置、周边磨床及工件定位定心的调整方法
- 一种可转位刀片周边磨床的刀片装夹定心调节装置