基于真空全息光镊的空间分辨压强测量系统及方法
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及一种用于测量微纳尺度局域压强空间分布的仪器及方法,属于精密测量技术领域,具体是一种基于真空全息光镊的空间分辨压强测量系统及方法。
背景技术
真空计是一种测量真空度或压强的仪器。在科研,工业领域存在广泛的应用。传统的真空测量手段有电离真空计,电容薄膜真空计,磁悬浮转子真空计等,其原理和标定手段各不相同。比如电离真空计是通过加强电场使气体分子电离,尔后测量电导率。电导率的大小取决于周围被电离的气体分子的密度,从而可以推导出压强的大小;电容薄膜真空计则是用薄膜作为电容的极板,当外界压强改变时,薄膜的移动会导致电容的变化,以此来测量压强;磁悬浮转子真空计是通过磁场悬浮一个球体,通过测量周围气体对其转动的阻滞力,就可以得到压强大小。
以上种种方法测量的都是宏观尺度的压强,而在抽真空的过程中,由于存在抽运阻抗等问题,在微观尺度上压强不一定是处处相等的。目前对于局域压强的测量方法还很有限。而真空光镊体系由于其能够将微纳粒子悬浮,天然地具备微纳尺度的局域探测能力。
自1971年美国物理学家Ashkin等人发明光镊以来,该技术被应用于医疗,热力学研究等领域。之后,又发展出了真空光镊技术,使得该方法能够与环境很好地解耦,从而获得非常高的测量精度。比如说,光镊可以用于测量微弱的力,加速度,位移等。真空光镊的捕获光如果使用纯净的线偏振光,那么其对于捕获微纳粒子的转动自由度是没有影响的。且由于悬浮微纳粒子与环境的作用很少,其转动自由度单纯地受到周围气体分子对其的阻滞作用,因此可以用于测量周围的压强。同时,气体分子与微纳粒子的相互作用只能通过碰撞方式,因此微纳粒子所测得的压强是相当于其自身尺寸的局域压强。而且,由于微纳粒子受外界干扰很小,这种测量方法在高真空下仍可以有较高的测量精度。
利用光的干涉特性,光束在空间中的传播方式可以通过对波前的调制来操控。全息光镊就是通过空间光调制器等方式将光束的强度或相位分布调整为特定的形式,从而可以实现在空间中形成多个聚焦位置,或者将聚焦点以预设的轨迹移动。将全息光镊的控制灵活性与真空光镊的局域压强测量手段相结合,得到的真空全息光镊可以实现对空间中压强的分布做微纳尺度分辨率的测量。
传统的压强测量手段对于微纳尺度空间分辨率的压强分布测量,尤其是在高真空下,是很难实现的。运用真空全息光镊技术,将粒子悬浮于空间中不同位置,使其几乎只受到周围气体分子碰撞的影响,极大拓展了压强的测量手段。在工业和学术上,尤其是对真空技术的发展具有重要意义。
发明内容
为了解决背景技术中存在的问题,本发明提出了一种基于真空全息光镊的空间分辨压强测量系统及方法。
本发明所采用的技术方案是:
一、一种基于真空全息光镊的空间分辨压强测量系统:
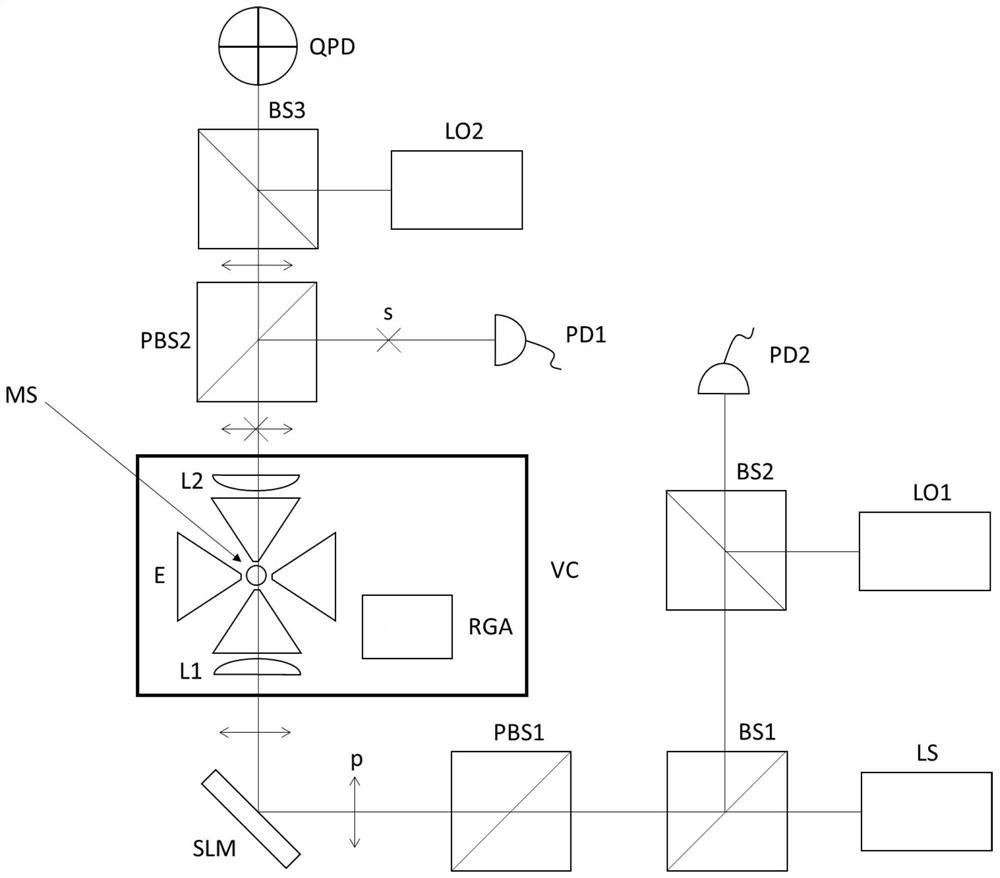
所述的真空全息光镊空间分辨压强测量系统包括真空腔VC、微纳粒子MS、光镊装置及反馈冷却装置、驱动电场装置E、空间光调制器SLM、偏振控制及检测装置和残余气体分析仪RGA;
驱动电场装置E包含六个电极,偏振控制及检测装置包含偏振控制装置和偏振检测装置,偏振控制装置采用第一偏振分光镜PBS1,偏振检测装置包含第二偏振分光镜PBS2和第一光电二极管PD1,光镊装置包含激光源LS第一凸透镜L1和第二凸透镜L2,反馈冷却装置包含第一分光镜BS1、第二分光镜BS2、第一参考光源LO1、第二光电二极管PD2、第三分光镜BS3、第二参考光源LO2和四象限探测器QPD;
真空腔VC内布置光镊装置、驱动电场装置E、微纳粒子MS和残余气体分析仪RGA,第二凸透镜L2和第一凸透镜L1分别对称位于微纳粒子MS的上下两侧且同光轴布置,第一凸透镜L1下方的真空腔VC外布置空间光调制器SLM、第一偏振分光镜PBS1、第一分光镜BS1、第二分光镜BS2、激光源LS、第一参考光源LO1和第二光电二极管PD2,第二凸透镜L2上方的真空腔VC外布置第二偏振分光镜PBS2,第一光电二极管PD1、第三分光镜BS3、第二参考光源LO2和四象限探测器QPD;
原始激光从激光源LS出射,经过第一分光镜BS1透射入射到第一偏振分光镜PBS1发生透射,使光束变成p偏振,p偏振平行于入射面,s偏振垂直于入射面,再依次经空间光调制器SLM反射调制、第一凸透镜L1透射汇聚后形成捕获光,捕获光照射微纳粒子MS处形成光阱捕获区域,同时捕获光经过微纳粒子后再经第二凸透镜L2透射汇聚后入射到第二偏振分光镜PBS2发生反射和透射,其中反射光只包含s偏振,透射光只包含p偏振,第二偏振分光镜PBS2反射的光束入射到第一光电二极管PD1,第二偏振分光镜PBS2透射的光束入射到第三分光镜BS3发生透射,第三分光镜BS3透射的光束入射到四象限探测器QPD,第二参考光源LO2发出光束经第三分光镜BS3反射后入射到四象限探测器QPD;
捕获光照射微纳粒子MS的反射光束按原路逆反到第一分光镜BS1发生反射,再入射到第二偏振分光镜PBS2发生透射,第二偏振分光镜PBS2透射的光束入射到第二光电二极管PD2,第一参考光源LO1发出光束经第二偏振分光镜PBS2反射后入射到第二光电二极管PD2;
六个电极分别布置在光阱捕获区域周围的立体六面侧旁。
透射过第二偏振分光镜PBS2的光束在第三分光镜BS3处和第二参考光源LO2射出的光进行合束,入射到四象限探测器探测进行外差干涉测量,得到微纳粒子在垂直于捕获光的方向上的二维平面上的位移;
经捕获光照射微纳粒子MS后反射回到第一偏振分光镜PBS1的光束,经过第一分光镜BS1的反射后在第二分光镜BS2处与第一参考光源LO1出射的光进行合束,入射到第二光电二极管PD2探测进行外差干涉测量,得到微纳粒子在平行于捕获光的方向上的位移;
利用测得的微纳粒子在垂直于捕获光的方向和平行于捕获光的方向的三个维度上的位移对激光源LS输出的光强I进行反馈冷却调节。
所述的真空腔的腔壁上开有用于光束透过/经过的透光光学窗口。
所述的由激光源LS输出,经过空间光调制器SLM调制和第一凸透镜L1汇聚在真空腔内形成真空全息光镊。
二、基于真空全息光镊的空间分辨压强测量系统的压强测量方法,其特征在于:方法如下:
1)开启空间分辨压强测量系统,捕获光照射真空腔VC内微纳粒子MS处形成光阱捕获区域,捕获光对微纳粒子MS产生光力;
2)从光阱捕获区域上方释放一个微纳粒子,之后微纳粒子MS在重力作用下向下做自由落体运动,到达光阱捕获区域被捕获,并通过反馈冷却稳定于光阱捕获区域的中心;
3)对光阱捕获区域周围的六个电极施加电压形成竖直向上的电场,电场对微纳粒子MS产生电场力F
4)将电场在预设电场值范围从小到大逐渐增加,重复步骤4)多次测量,再利用多次测量获得的电场力和捕获光的光强I按照以下公式的线性关系I=αF
5)将无捕获光的光强I=0时代入线性关系I=αF
6)用残余气体分析仪RGA测量真空腔VC内的残余气体分子质量m
7)在未加电场的情况下,通过调节捕获光的光强I使微纳粒子MS在光力和重力受力下保持平衡,用偏振控制及检测装置测量此时微纳粒子的转动频率作为无电场的微纳粒子的稳定转动频率f
8)通过空间光调制器SLM调制,移动真空全息光镊的光阱捕获区域,移动到所需待测位置;
9)打开电场,控制电场驱动微纳粒子以高于无电场的微纳粒子的稳定转动频率f
10)关闭电场,通过测量关闭电场后微纳粒子的转动频率随时间变化的数据,通过代入拟合以下公式获得弛豫时间τ:
其中,f(t)表示时刻t下的微纳粒子的转动频率,t表示时刻,e表示自然常数,τ表示弛豫时间,t
接着根据弛豫时间τ按照以下公式计算气体的阻滞系数β
τ=J/β
其中,β
最后根据气体的阻滞系数β
其中,κ表示压强系数,P表示所需待测位置的压强,T表示真空腔内残余气体分子的温度,k
11)不断重复以上8)~10)步骤,测出真空腔内空间中不同位置的压强,形成压强分布。
所述的偏振控制及检测装置中第一光电二极管PD1接收光信号分析获得垂直于捕获光的s偏振的光强变化频率,取s偏振光强变化频率的1/2作为微纳粒子的转动频率。
所述的微纳粒子为密度已知的均匀二氧化硅球体,微纳粒子的大小决定了该方法测量压强的空间分辨率。方法实施开始前,微纳粒子可以由范氏力吸附在起支装置上,在测量开始用压电陶瓷的高频振动将微纳粒子释放,进入光阱捕获区域处被捕获。
激光通过偏振控制装置调节为线偏振,在经过和微纳粒子相互作用之后,通过偏振检测装置检测获得s偏振光强变化频率f
使用电场和微纳粒子的电偶极矩耦合,驱动微纳粒子以f
电场力的测量是用已知的电压和电极位置,得出微纳粒子处的电场,结合微纳粒子的电荷量得出。而微纳粒子的带电量是通过紫外光照射电极,使电极放电给微纳粒子来控制的。利用电荷的量子化特性,能精确到单个电子电量地调控微纳粒子的带电量。
用空间光调制器以衍射光栅和Fresnel透镜的形式产生全息光镊,可以三维地改变微纳粒子的捕获位置,从而对空间中不同位置进行测量。
本发明方法测得的压强是微观尺度的局域压强,再结合全息光镊可以改变微纳粒子的捕获位置的特点,则能够测得空间中各个位置的压强分布。全息光镊是利用光的干涉特性,通过调制光的相位或强度分布来改变全息光镊的捕获位置的方法。
本发明中,光镊装置通过激光源输出激光,通过凸透镜于真空腔内汇聚形成真空光镊;反馈冷却装置通过收集经过微纳粒子反射和透射的光,利用分光镜与参考光源输出的光进行外差干涉测量,生成反馈信号来调节激光源输出激光的功率;微纳粒子释放装置位于真空腔中,提供微纳粒子,作为测量介质;驱动电场与微纳粒子的电偶极矩耦合使其高速旋转;空间光调制器通过对捕获光的波前进行调制来产生全息光镊;偏振控制及检测装置利用微纳粒子的的电偶极矩和光的偏振的耦合来探测微纳粒子的转速,结合气体成分测量装置达到测量压强的效果。
本发明空间分辨压强测量系统利用真空光镊悬浮微纳粒子的高空间分辨率,结合全息光镊的易操控性,通过气体分子对微纳粒子转动自由度的阻滞作用来测量微纳尺度的压强分布。
本发明具有的有益效果是:
本发明首次提出了基于真空全息光镊空间分辨压强测量系统及方法方案,利用微纳粒子与周围气体的碰撞测量压强,由于这种相互作用是局域的,因此可以使测量的分辨率达到微纳粒子本身的尺度。又由于真空全息光镊体系很好地排除了外界环境对微纳粒子的干扰,使之几乎只受到待测气体的影响,因此可以达到很好的测量精度。再结合全息光镊能够改变微纳粒子捕获位置的特点,该方法可以实现微纳尺度分辨率的空间压强分布测量。为工业和科学研究,尤其是真空技术领域,提供了一种新颖的测量手段。
附图说明
图1是本发明的装置示意图;
图2是本发明的空间分辨的压强测量流程图;
图3是本发明的全息光镊调节捕获位置示意图。
图中:真空腔VC、微纳粒子MS、第一凸透镜L1、第二凸透镜L2、第一偏振分光镜PBS1、第二偏振分光镜PBS2、光电二极管PD。
具体实施方式
下面结合附图和实施例对本发明作进一步说明:
真空全息光镊空间分辨压强测量系统包括真空腔VC、微纳粒子MS、光镊装置及反馈冷却装置、驱动电场装置E、空间光调制器SLM、偏振控制及检测装置和残余气体分析仪RGA;驱动电场装置E包含六个电极,偏振控制及检测装置包含偏振控制装置和偏振检测装置,偏振控制装置采用第一偏振分光镜PBS1,偏振检测装置包含第二偏振分光镜PBS2和第一光电二极管PD1,第一光电二极管PD1用于探测光信号,光镊装置包含第一凸透镜L1和第二凸透镜L2;真空腔VC内布置光镊装置、驱动电场装置E、微纳粒子MS及其释放装置和残余气体分析仪RGA,第二凸透镜L2和第一凸透镜L1分别对称位于微纳粒子MS的上下两侧且同光轴布置,驱动电场装置E为六个电极,布置在微纳粒子MS的立体六面侧旁,形成正方体的六面位置,第一凸透镜L1下方的真空腔VC外布置空间光调制器SLM,第一偏振分光镜PBS1,第一分光镜BS1,第二分光镜BS2,激光源LS,第一参考光源LO1和第二光电二极管PD2,第二凸透镜L2上方的真空腔VC外布置第二偏振分光镜PBS2,第一光电二极管PD1,第三分光镜BS3,第二参考光源LO2和四象限探测器QPD;光镊装置通过激光源LS输出激光,通过空间光调制器调制SLM和第一凸透镜L1汇聚于真空腔VC内形成真空全息光镊;反馈冷却装置通过收集经过微纳粒子MS反射和透射的光,利用第二分光镜BS2将反射的光与第一参考光源LO1输出的光合束入射到第二光电二极管PD2进行外差干涉测量,利用第三分光镜BS3将透射的光于第二参考光源LO2输出的光合束入射到四象限探测器QPD进行外差干涉测量,将生成反馈信号用来调节激光源LS输出激光的功率。从激光源LS出射的捕获光经过第一分光镜BS1入射到第一偏振分光镜PBS1发生透射,再依次经空间光调制器SLM反射调制、第一凸透镜L1透射汇聚后形成捕获光,光束在真空腔内汇聚构成真空全息光镊,捕获光照射微纳粒子MS处形成单光束的针对微纳粒子的光阱捕获区域,同时捕获光经过微纳粒子后再经第二凸透镜L2透射汇聚后入射到第二偏振分光镜PBS2发生反射和透射,第二偏振分光镜PBS2反射的光束入射到第一光电二极管PD1;第二偏振分光镜PBS2透射的光束在第三分光镜BS3处与第二参考光源LO2射出的激光合束后入射到四象限探测器QPD进行外差干涉测量;微纳粒子MS反射的捕获光经第一凸透镜L1,空间光调制器SLM,第一偏振分光镜PBS1后,被第一分光镜BS1反射,并在第二分光镜BS2处与第一参考光源LO1射出的光合束后入射到第二光电二极管PD2进行外差干涉测量;微纳粒子MS位于真空腔VC的中心,六个电极分别对称布置在光阱捕获区域周围的立体六面侧旁,形成正方体的六面位置。
接收探测第二偏振分光镜PBS2发生透射的光束和经捕获光照射微纳粒子MS后反射逆反回到第一偏振分光镜PBS1的光束。对于透射过第二偏振分光镜PBS2的光束,用第三分光镜BS3使其和第二参考光源LO2射出的光合束,并用四象限探测器进行外差干涉测量,得到微纳粒子在垂直于捕获光的方向上的位移。对于回到第一偏振分光镜PBS1的光束,使其经过第一分光镜BS1的反射,在第二分光镜BS2的作用下与第一参考光源LO1出射的光合束,并入射到第二光电二极管PD2进行外差干涉测量,得到微纳粒子在平行于捕获光的方向上的位移。利用测得的微纳粒子的位移对激光源LS输出的光强I进行反馈冷却调节。
微纳粒子MS为用于压强测量的介质,在每次测量过程中由微纳粒子释放装置提供;微纳粒子MS采用硅材料。
真空腔为微纳粒子提供接近真空的测量环境,真空腔的腔壁上开有透光光学窗口,真空腔内外的光信号通过光学窗口传播。
驱动电场的六个电极施加电压,用于驱动粒子旋转。
空间光调制器调制捕获光的波前相位形成全息光镊,进而用于改变全息光镊的光阱捕获区域。
偏振控制及检测装置用于探测微纳粒子的转动频率,是通过第一光电二极管PD1所接收光信号进行分析处理获得微纳粒子的转动频率。
原始激光经第一偏振分光镜PBS1处理为p偏振方向的激光,进而捕获光也是p偏振方向的,p偏振方向的捕获光在真空腔内经微纳粒子的转动影响产生s偏振方向的光,进而经第二偏振分光镜PBS2反射到光第一光电二极管PD1,进而分析s偏振方向的光强变化频率能获得微纳粒子的转动频率。
残余气体分析仪用于真空腔内气体分子的成分和质量。
本发明的具体实施过程如下:
1)开启空间分辨压强测量系统,捕获光照射真空腔VC内微纳粒子MS处形成单光束的针对微纳粒子的光阱捕获区域,捕获光对微纳粒子MS产生光力;
2)释放从光阱捕获区域上方一个微纳粒子,之后微纳粒子MS在重力作用下向下做自由落体运动,到达光阱捕获区域被捕获,并通过反馈冷却稳定于光阱捕获区域的中心;
3)对光阱捕获区域周围的六个电极施加电压形成竖直向上的电场,电场对微纳粒子MS产生电场力F
4)将电场在预设电场值范围从小到大逐渐增加,具体从1×10
5)将无捕获光的光强I=0时代入线性关系I=αF
6)用残余气体分析仪测量真空腔VC内的残余气体分子质量m
7)在未加电场的情况下,通过反馈冷却调节捕获光的光强使微纳粒子MS在光力和重力受力下保持平衡,微纳粒子在捕获光的作用下达到稳定的运动状态,用偏振控制及检测装置测量此时微纳粒子的转动频率作为无电场的微纳粒子的稳定转动频率f
偏振控制及检测装置中第一光电二极管PD1接收光信号分析获得垂直于捕获光的偏振光强变化频率,取垂直于捕获光的偏振光强变化频率的1/2作为微纳粒子的转动频率。
8)通过空间光调制器SLM调制,移动全息光镊的光阱捕获区域,移动到所需待测位置;
9)打开电场,控制电场驱动微纳粒子以高于无电场的微纳粒子的稳定转动频率f
具体实施一般需要高出两个数量级以上,这里的转动频率越高,能测量的气压下限就越低。
在前后左右四个同一平面的电极上施加振幅和频率都相等正弦电压信号,相邻两个电极之间的驱动信号差四分之一周期的相位。这样就在微纳粒子处产生了大小恒定,方向保持在一个平面内转动的电场。由于电场和微纳粒子的电偶极矩耦合,微纳粒子会随着电场转动。
10)关闭电场,通过测量关闭电场后微纳粒子的转动频率随时间变化的数据,通过代入拟合以下公式获得弛豫时间τ:
其中,f(t)表示时刻t下的微纳粒子的转动频率,t表示时刻,e表示自然常数,τ表示弛豫时间,t
接着根据弛豫时间τ按照以下公式计算气体的阻滞系数β
τ=I/β
其中,β
最后根据气体的阻滞系数β
其中,κ表示压强系数,P表示所需待测位置的压强,T表示真空腔内残余气体的温度,k
11)不断重复以上8)~10)步骤,测出真空腔内空间中不同位置的压强,形成压强分布。
图3是利用全息光镊改变捕获位置的示意图。其中a)、c)、e)表示空间光调制器上的三种相位分布,为方便起见以透射式空间光调制器表示,b)、d)、f)为对应的三种捕获光路图。在光路图中,准直的捕获光束自左向右依次经过空间光调制器和汇聚透镜,最终在像方空间指定位置聚焦,形成捕获区域。a)中所示为空间光调制器未对捕获光进行调制,其相位在空间光调制器出射面上处处相等,b)中对应地,捕获光经过透镜汇聚后聚焦在透镜的焦平面中心。c)中空间光调制以衍射光栅的形式调节捕获光相位,如图d),使捕获光的聚焦位置横向移动。其移动的距离和方向可以通过改变衍射光栅的刻线密度和刻线方向来调节。e)中空间光调制器以Fresnel透镜的形式调节捕获光相位,使得f)中捕获光的聚焦位置在轴向上移动,移动的距离可由空间光调制器上的轴向刻线密度来调节。将c)和e)两种相位调制进行标量和并对2π取余,可以得到同时改变横向和轴向聚焦位置的相位调节方式。
由此实施可见,本发明利用全息光镊的操控灵活性,结合微纳粒子的局域探测手段,可以实现高真空下微纳尺度空间分辨率的压强分布测量。
- 基于真空全息光镊的空间分辨压强测量系统及方法
- 基于真空全息光镊的空间分辨压强测量系统及方法