抽吸式分拣与收纳装置
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及农产品杂物分拣领域,特别涉及一种抽吸式分拣与收纳装置。
背景技术
目前,农产品加工过程中,除了应用风选除杂和光谱除杂之外,通常在生产线上设置了几道人工拣杂的环节,通过人工判别挑拣的方式除去麻绳、纸片、塑料绳、羽毛等非金属杂质,以提高物料的纯净度。
在人工拣杂时要求工人时刻观察流水线上物料的动态,识别物料中混入的杂物,并从动态物料中挑拣出杂物,这一连串的操作对视觉与动态判断的要求非常高,且工作强度大,在长时间疲劳状态下,工人很难持续保持很高的工作效率。
市面上的拣杂机器人夹具部分一般采用机械手爪或吸盘吸附方式。机械手爪类型的夹具抓手在闭合后手指间仍存在较大间隙,在夹持杂物并高速移动过程中,杂物容易从手指间的缝隙中落下,导致拣出失败;而吸盘吸附方式无法吸取深层的杂物,容易漏捡,且这两种形式都需在拾取杂物后移动到生产线外指定位置释放杂物,工作周期耗时长,无法适应生产线快速的生产节奏。
公开号为CN210279835U“一种烟草行业除杂装置”、CN105731074B“立式的用于烟草碎片除杂及储料的装置”和CN112044783A“一种提升废烟烟丝纯净度的装置及废烟烟丝多级除杂方法”的发明专利采用负压吸附原理和静电吸附方法,然而这种方法对尺寸较大的块状橡胶等效果较差,主要对灰尘和轻质物体有效。
公开号为CN212334523U“一种可调宽度平行四边抱爪机构”、CN210939327U“一种自适应气爪手指”的发明专利采用机械爪抓取的方法,但是这种方法在拣起杂物后,细长型杂物容易从气爪手指缝隙掉落,导致漏捡。
由于上述难点的存在,现在业内对杂物分拣的夹具部分还缺少成熟的解决方案。因此,亟需一种新的夹具设计,以解决现有技术存在的问题。
发明内容
本发明的目的在于提供一种抽吸式分拣与收纳装置,能够提高对杂物的分拣效率,解决了现有技术中拣杂机器人工作周期耗时长、无法拣取尺寸较大杂物、手指抓取后易掉落的问题。
为实现上述目的,本发明提供一种抽吸式分拣与收纳装置,包括:
收纳箱,所述收纳箱用于储存杂物;
第一输送型真空发生器,所述第一输送型真空发生器的一端连通所述收纳箱;
管道,所述管道的一端连通所述第一输送型真空发生器的另一端;
第二输送型真空发生器,所述第二输送型真空发生器的一端连通所述管道的另一端;
插板阀,所述插板阀的一端与所述第二输送型真空发生器的另一端连接;
波纹管,所述波纹管的一端与所述插板阀的另一端连接;
其中,所述波纹管的另一端用于吸入杂物;所述插板阀用于控制所述波纹管与所述第二输送型真空发生器的连通与阻断;所述第二输送型真空发生器用于提供吸力;所述第一输送型真空发生器用于提供吸力。
可选的,所述收纳箱与所述第一输送型真空发生器连接的一面为一倾斜面,所述倾斜面与水平方向的夹角为α,所述30°<α<60°。
可选的,所述管道由金属管、中部波纹管、金属管三段连接组成,且所述管道有一弯曲处,其中所述弯曲处的角度呈180°-α。
可选的,所述收纳箱设置有一网状出气口。
可选的,还包括,设置于所述插板阀与所述第二输送型真空发生器之间的连接件,所述连接件沿径向向外延伸与一导向轴支座连接,所述导向轴支座可由外部控制带动所述抽吸式分拣与收纳装置移动。
可选的,所述插板阀包括外壳、门以及气缸,所述气缸控制门的拉出与缩进,以连通或阻断所述波纹管与所述第二型真空发生器。
可选的,所述收纳箱设置有可打开的活动门。
可选的,所述可打开的活动门是透明的。
可选的,所述波纹管的直径为20mm~90mm。
本发明提供的抽吸式分拣与收纳装置,利用第二输送型真空发生器吸入杂物,代替传统的机械手抓取以及吸盘盘夹取或吸取,减少拾取和释放的时间;设置的波纹管可以深入物料内部,解决了传统的机械手抓取以及吸盘盘夹取或吸取无法处理物料深层杂物的情况;杂物通过管道输送,由第一输送型真空发生器吸入收纳箱,相较于机械手抓取和吸盘盘夹取或吸取,在应对于多个杂物临近出现的情况时,省去了杂物拾取点和释放点之间的来回往复的耗时,提高了分拣效率;通过波纹管吸取杂物,适用于各种杂物的抓取,不仅可以分拣橡胶、树枝等实心杂物,也可以分拣麻绳、纸片、塑料绳、羽毛等轻质杂物,通用性强,应用范围广;还可以根据给定位置准确吸取,对坐标精度要求不高。
附图说明
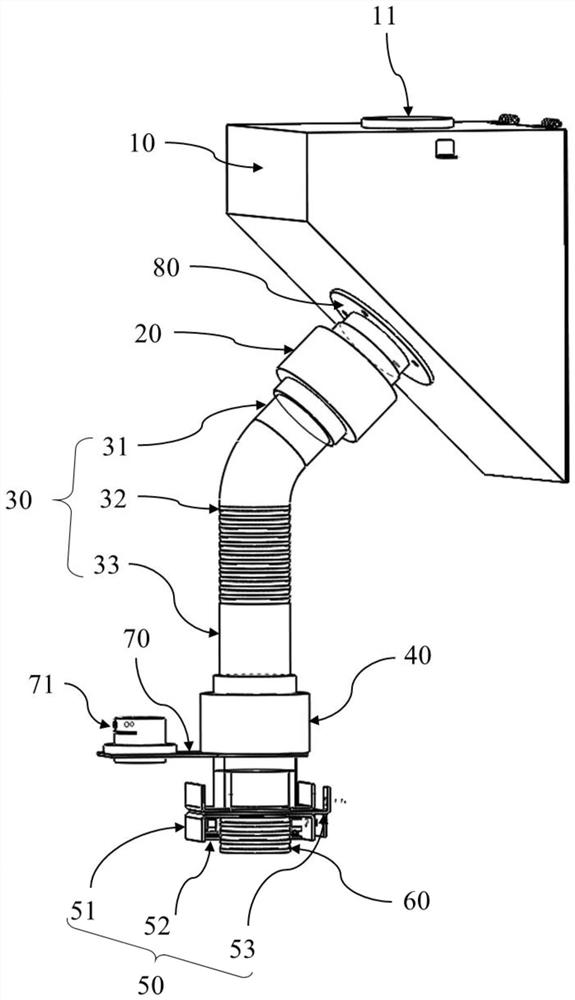
图1是本发明一实施例的抽吸式分拣与收纳装置的示意图;
其中,附图1附图标记说明如下:
10-收纳箱;11网状出气孔;20-第一输送型真空发生器;30-管道;31、
33金属管;32-中部波纹管;40-第二输送型真空发生器;50-插板阀;51-外壳;52-气缸;53-阀门;60-波纹管;70-连接件;71-导向轴支座;80-连接法兰。
具体实施方式
为使本发明的目的、优点和特征更加清楚,以下结合附图1对本发明提出的抽吸式分拣与收纳装置作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
本发明一实施例提供一种抽吸式分拣与收纳装置,参阅图1,从图1中可以看出,所述抽吸式分拣与收纳装置包括:收纳箱10,所述收纳箱用于储存杂物;第一输送型真空发生器20,所述第一输送型真空发生器20的一端连通所述收纳箱10;管道30,所述管道30的一端连通所述第一输送型真空发生器20的另一端;第二输送型真空发生器40,所述第二输送型真空发生器40的一端连通所述管道30的另一端;以及,插板阀50,所述插板阀50的一端与所述第二输送型真空发生器40的另一端连接;波纹管60,所述波纹管60的一端与所述插板阀50的另一端连接;其中,所述波纹管60的另一端用于吸入杂物;所述插板阀50用于控制所述波纹管60与所述第二输送型真空发生器40的连通与阻断;所述第二输送型真空发生器40用于提供吸力;所述第一输送型真空发生器20用于提供吸力。
下面参阅图1对所述抽吸式分拣与收纳装置进行详细说明:
所述抽吸式分拣与收纳装置包括收纳箱10,所述收纳箱10用于储存杂物;参阅图1,所述收纳箱10为一六面体,需要说明的是,所述收纳箱10并不限于六面体,也可以是其他能够形成有储存杂物的空间的多面体,且所述收纳箱10与第一输送型真空发生器20的一端连通,优选地,所述收纳箱10与所述第一输送型真空发生器20连接的一面为倾斜面,所述倾斜面与水平方向的夹角为α,所述30°<α<60°,有利于进入所述收纳箱10的杂物顺着倾斜面落入所述收纳箱10的底部,而不会由于重力落回与所述第一输送型真空发生器20的另一端连接的管道30,更不会造成杂物在所述第一输送型真空发生器20与所述收纳箱10连接处的拥堵。
所述收纳箱10的还设置有一网状出气口11,所述网状出气口11用于气体排出装置内部,网状结构能够阻挡杂物从出气口的飞出,且设置在顶部,所述杂物会由于自身的重力作用更不容易从所述网状出气口飞出。
另外地,所述收纳箱10上还设置有可打开活动门,用于从所述收纳箱中取出分拣并储存的杂物,本实施例中,所述可打开的活动门设计为一透明门,且设置于所述收纳箱10与所述第一输送型真空发生器20连接面相对的另一面上,所述透明门通过合页铰链安装于所述收纳箱10上,不仅能方便取出所述杂物,且通过所述透明门还可以观察到所述收纳箱10内部杂物的储存情况;在其他实施例中,所述可打开的小窗或门也可以设置在所述收纳箱10其他的表面上以及采用非透明门的设计,例如木门、塑料门、铝制门等。
其中,具体地,在本实施例中所述收纳箱10与所述第一输送型真空发生器20通过连接法兰80连接,在本发明的其他实施例中,也可以采用其他连接方式。
所述管道30的一端连通所述第一输送型真空发生器20的另一端,所述管道30的另一端连通第二输送型真空发生器40的一端,所述管道30由金属管31、中部波纹管32、金属管33三段连接组成,且所述管道30有一弯曲处,优选地,所述弯曲处的角度为180°-α,在本实施例中,所述α优选为45°,即收纳箱10与所述第一输送型真空发生器20连接面与水平方向的夹角为45°,则所述弯曲处的角度为135°,可以保证所述管道30的下部分是竖直的,所述弯曲处有一定的角度有利于位于所述管道30弯曲处上部的杂物不会由于重力在管道30内下落。
在本实施例中,所述收纳箱10在所述抽吸式分拣与收纳装置的最上方,减少所述管道30的弯曲,可防止杂物在所述管道30中发生堵塞。
所述插板阀50的一端连接所述第二输送型真空发生器40的另一端,所述插板阀50的另一端连接波纹管60。
所述插板阀50用于控制所述波纹管60与所述第二输送型真空发生器40的连通,具体地,所述插板阀50包括外壳51、阀门53以及气缸52,所述气缸52控制阀门53的拉出与缩进,在实际生产过程中,杂物混杂在物料中被输送过来,所述气缸52得到信号拉出所述阀门53,同时第二输送型真空发生器40开始工作,产生强吸附力使得杂物从所述波纹管60被吸入管道30内部。
所述波纹管60用于供杂物进入装置内部,杂物混杂在物料中被输送过来,物料总体呈中间厚两边薄的堆积状态,所述波纹管60能够下探至物料内部一定深处,能够防止物料对机械部分的损伤,且能够吸取更深层的杂物。所述波纹管60的直径为20mm~90mm,通过所述波纹管60吸取杂物,适用于各种杂物的抓取,不仅可以分拣橡胶、树枝等实心杂物,也可以分拣麻绳、纸片、塑料绳、羽毛等轻质杂物,通用性强,应用范围广。
另外地,所述抽吸式分拣与收纳装置还可以包括设置于所述插板阀50与所述第二输送型真空发生器40之间的连接件70,所述连接件70沿径向向外延伸与一导向轴支座71连接,所述导向轴支座71可由外部控制带动所述抽吸式分拣与收纳装置移动。
所述抽吸式分拣与收纳装置利用所述第二输送型真空发生器40吸入杂物,代替传统的机械手抓取以及吸盘夹取或吸取,减少拾取和释放的时间;所述波纹管60可以深入物料内部,解决了传统的机械手抓取以及吸盘夹取或吸取无法处理物料深层杂物的情况;杂物通过所述管道30输送,由所述第一输送型真空发生器20吸入所述收纳箱10,相较于机械手抓取和吸盘夹取或吸取,在应对于多个杂物临近出现的情况时,省去了杂物拾取点和释放点之间的来回往复的耗时,提高了分拣效率;通过所述波纹管60吸取杂物,适用于各种杂物的抓取,不仅可以分拣橡胶、树枝等实心杂物,也可以分拣麻绳、纸片、塑料绳、羽毛等轻质杂物,通用性强,应用范围广;还可以根据给定位置准确吸取,对坐标精度要求不高。
综上所述,本发明提供的抽吸式分拣与收纳装置,包括收纳箱,所述收纳箱用于储存杂物;第一输送型真空发生器,所述第一输送型真空发生器的一端连通所述收纳箱;管道,所述管道的一端连通所述第一输送型真空发生器的另一端;第二输送型真空发生器,所述第二输送型真空发生器的一端连通所述管道的另一端;以及插板阀,所述插板阀的一端与所述第二输送型真空发生器的另一端连接;波纹管,所述波纹管的一端与所述插板阀的另一端连接;其中,所述波纹管的另一端用于供杂物进入装置内部;所述插板阀用于控制所述波纹管与所述第二输送型真空发生器的连通;所述第二输送型真空发生器用于吸取杂物进入管道;所述第一输送型真空发生器用于吸取管道内的杂物进入收纳箱。本发明提供的抽吸式分拣与收纳装置提高对杂物的分拣效率,解决了现有技术中拣杂机器人工作周期耗时长、无法拣取尺寸较大杂物、手指抓取后易掉落的问题。
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
- 抽吸式分拣与收纳装置
- 抽吸式分拣与收纳装置