一种胶囊内窥镜的磁控活检机构
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及胶囊内窥镜,尤其涉及一种胶囊内窥镜的磁控活检机构。
背景技术
胶囊内窥镜是胃肠道疾病检查和内镜发展的革命性创新,与传统的内镜检查相比,它不但具有无痛无创的舒适化内镜特点,而且具有极高的检查准确度。其基本特征是用微摄像头无线传输检查图像,实现采样,施药等功能。具有活检功能的胶囊内窥镜是在临床实践中有效应用胶囊的关键技术之一。
现有的具有活检功能的内窥镜胶囊可分为外部控制和内部控制,内部控制主要有形状记忆合金,扭力弹簧,微型夹具驱动,这些活检驱动装置结构较为复杂,能量供应需求高,不可重复采样。外部控制主要为磁控方式,基本作为活检模块集成于胶囊内窥镜中,占据了大量的内部空间,可更改性不强,采样范围小。这些问题阻碍了采样模块在胶囊内窥镜机器人领域中的广泛应用。
发明内容
为了解决现有技术中的问题,本发明提供了一种胶囊内窥镜的磁控活检机构,可以安装在胶囊内窥镜的外表面,可以在不改变现有胶囊内部结构的情况下,增加活检功能,装卸方便。
本发明提供了一种胶囊内窥镜的磁控活检机构,包括固定基座、定子永磁体、活检工作头、动子永磁体、移动基座和保护壳,其中,所述固定基座、定子永磁体、活检工作头、动子永磁体、移动基座均位于所述保护壳之内,所述固定基座固定在胶囊内窥镜的外部,所述定子永磁体固定在所述固定基座上,所述动子永磁体固定在所述移动基座上,所述活检工作头的后端固定在所述移动基座上,所述活检工作头的前端与所述固定基座为导向配合,施加外磁场后,动子永磁体和移动基座同步沿轴向运动,从而使固连在移动基座上的活检工作头从前端的固定基座伸出,进行采样活检操作,撤去外磁场后,定子永磁体排斥动子永磁体,从而使活检工作头回收复位。
作为本发明的进一步改进,所述胶囊内窥镜外部驱动方式为磁驱动,根据施加外磁场的方式具体表现为电磁驱动和永磁驱动。其头部材料为透明材质,头部装有摄像头,以便于进行图像的采集,观察采样过程。
作为本发明的进一步改进,所述固定基座为圆环状,所述胶囊内窥镜的外壳为圆柱状,所述固定基座与所述胶囊内窥镜的外壳为过盈配合,所述固定基座固定在所述胶囊内窥镜的外壳的外表面。
作为本发明的进一步改进,所述移动基座为圆环状,所述移动基座与所述胶囊内窥镜的外壳的外表面为滑动配合。
作为本发明的进一步改进,所述定基座、定子永磁体、动子永磁体、移动基座、保护壳和胶囊内窥镜的外壳同轴设置。
作为本发明的进一步改进,所述固定基座上设有轴向设置的导向通孔,所述活检工作头的前端穿设在所述导向通孔上。
作为本发明的进一步改进,所述定子永磁体和动子永磁体均为轴向充磁的圆环型永磁体,所述定子永磁体和所述动子永磁体在初始状态时相互排斥。
作为本发明的进一步改进,所述定子永磁体和动子永磁体应为相同材料,相同大小,初始状态下两者相互相向放置,永磁体材料包括但不限于钕铁硼材料。
作为本发明的进一步改进,所述永磁体为轴向充磁的圆环型永磁体。沿轴向方向,动子永磁体上下两部分为N级,S级,定子永磁体上下两部分为S级, N级。两者放置时相互排斥。
作为本发明的进一步改进,所述活检工作头为活检针或者活检钳,所述活检工作头的头部内置有压力传感器。
作为本发明的进一步改进,所述移动基座上设有凸台,所述活检工作头的后端固定在所述凸台上。
作为本发明的进一步改进,所述保护壳为一种圆柱形中空结构,具有薄壁特征,减小胶囊整体尺寸。保护壳与固定基座过盈配合,保护壳内径略小于固定基座外径,左边缘与前端固定基座左边缘重合,右端呈圆弧过渡,限制动子永磁体在定子永磁体排斥力的作用下的移动范围。保护壳具有保护采样装置不受人体内部环境干扰以及维持图像采集功能的作用。
作为本发明的进一步改进,所述保护壳的后端设有限制所述移动基座向后移动范围的限位圆弧。
作为本发明的进一步改进,所述固定基座边缘与胶囊内窥镜的头部边缘重合,并和外壳成过盈配合,固定基座内径略小于胶囊内窥镜的外壳直径,所述活检工作头轴线应与固定基座预留孔中心线重合。
作为本发明的进一步改进,所述定子永磁体和固定基座成过盈配合,在活检采样操作中位置保持不变。定子永磁体内径略小于固定基座外径。
作为本发明的进一步改进,所述活检工作头末端与移动基座连接方式为过盈配合。移动基座凸台上孔径应略小于活检工作头末端直径。
作为本发明的进一步改进,所述移动基座和动子永磁体连接方式为过盈配合。圆环形动子永磁体内径略小于移动基座外径,圆环型动子永磁体受到磁场力作用,带动移动基座一起沿轴向运动,使活检工作头伸出。
作为本发明的进一步改进,外加的驱动梯度磁场可以为由组合电磁线圈激发的电磁场或由永磁体激发的永磁场。在外部磁场的驱动下,磁场的方向时刻发生变化且与所述轴向充磁的环形永磁体的磁化方向不一致,所述的环形永磁体受到磁力的作用沿轴向运动,受到磁力矩的作用调整胶囊姿态,使胶囊头部和活检组织表面垂直,以便提高采样成功率。
作为本发明的进一步改进,所述装置中的固定基座,活检工作头,移动基座,保护壳等零件由非磁性的材料加工而成。
作为本发明的进一步改进,所述商业磁驱动胶囊内窥镜的头部材料为透明材质,头部装有摄像头,以便于进行图像的采集,观察采样过程。
本发明的有益效果是:本发明提供的磁控活检机构,外置于磁驱动胶囊内窥镜表面,结构简单,易于装拆,无需更改现有结构,增加采样功能;驱动能量全部由外磁场远程提供,无需内置电池,减小对人体的损害;装置可以通过多次施加外磁场,反复进行采样活检操作,提高采样成功率;活检工作头从轴向伸出,增大了采样范围,易于位于胶囊头部的摄像头和外磁场配合,更好的观察采样过程;在外磁场的作用下,动子永磁体被吸引,定子永磁体被排斥,减小了胶囊对于胃肠道内壁的压力。
附图说明
图1是本发明一种集成了磁控采样机构的磁驱动胶囊内窥镜示意图。
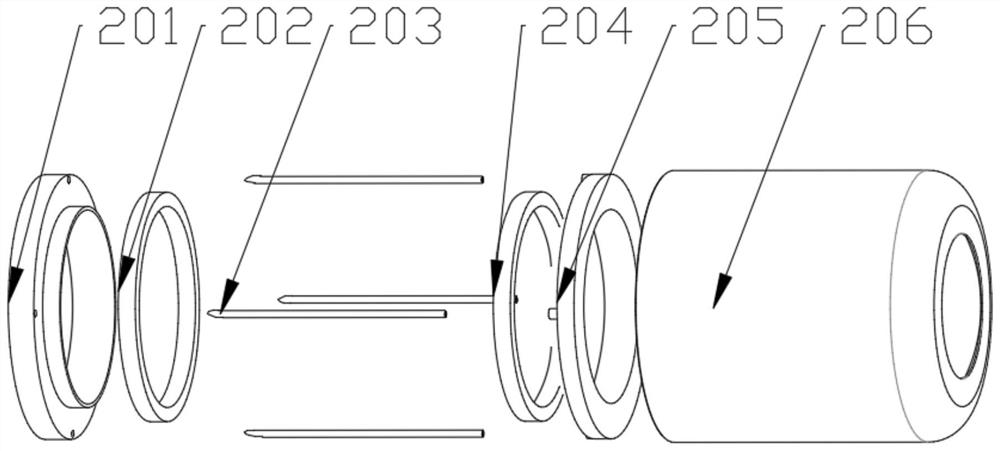
图2是本发明一种胶囊内窥镜的磁控活检机构的分解示意图。
图3是本发明一种胶囊内窥镜的磁控活检机构的正视剖视图。
图4是本发明一种集成了磁控活检机构的胶囊内窥镜的正视剖视图。
图5是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的驱动初始状态图(未加保护壳)。
图6是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的驱动完成状态图(未加保护壳)。
图7是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的采样过程中发现目标采样点的示意图(未加保护壳)。
图8是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的采样过程中到达目标采样点的示意图(未加保护壳)。
图9是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的采样过程中采集样本组织的示意图(未加保护壳)。
图10是本发明一种集成了磁控活检机构的胶囊内窥镜机器人的采样过程中离开目标采样点的示意图(未加保护壳)。
具体实施方式
下面结合附图说明及具体实施方式对本发明作进一步说明。
图1是本发明一种集成了磁控活检机构的磁驱动胶囊内窥镜,包括磁驱动胶囊1和磁控活检机构2。
如图2至图10所示,一种胶囊内窥镜的磁控活检机构由固定基座201,定子永磁体202,活检工作头203,动子永磁体204,移动基座205,保护壳206组成。
所述固定基座201通过与磁驱动胶囊1的胶囊外壳过盈配合,固定于外壳表面,同时作为活检工作头203的导向装置,限制活检工作头203的移动方向和范围。所述定子永磁体202与固定基座201过盈配合,固定于固定基座201处。所述活检工作头203和移动基座205过盈配合。所述动子永磁体204和移动基座205过盈配合,同步运动。所述定子永磁体202和动子永磁体204在初始状态时相互排斥,保护壳206限制动子永磁体204的初始位置。施加外磁场后,动子永磁体204和移动基座205沿轴向运动,从而使固连在移动基座205上的活检工作头203从前端的固定基座201的预留孔伸出,进行采样活检操作。撤去外磁场后,定子永磁体202排斥动子永磁体204,从而使活检工作头203回收至保护壳206内部,从而完成一次采样运动。所述保护壳206将装置其他元件与人体内部环境隔离,同时限制动子永磁体204的初始位置和回复位置。
施加的外磁场可以为驱动梯度磁场。
所述外加的驱动梯度磁场可以为由组合电磁线圈激发的电磁场或由永磁体激发的永磁场。在外部磁场的驱动下,磁场的方向时刻发生变化且与所述轴向充磁的环形永磁体的磁化方向不一致,所述的环形永磁体受到磁力的作用沿轴向运动,受到磁力矩的作用调整胶囊姿态,使胶囊头部和活检组织表面垂直,以便提高采样成功率。
活检工作头203优选为活检针。
采样方式包括但不限于针刺式活检。本发明采用针刺式活检,脱胎于临床中的器官穿刺检查,是一种利用细针扎入组织内部获取样本的方法。也可采用钳夹式活检,即活检工作头更换为活检钳等。
所述活检工作头203的数量可以根据实际情况进行调整。本发明采用间隔为90°分布的4个活检工作头203,若需要较大范围的采样以及较精确的采样结果,可以适当增加活检工作头,若需要减轻活检装置质量,可以适当减少活检工作头。
所述活检工作头203头部内置有压力传感器。以便确定是否可以进行采样操作,防止对人体产生伤害。
从图3可以看出动子永磁体204为圆环形,和移动基座205采用过盈配合,即当存在外磁场,动子永磁体204被吸引,带动移动基座205运动,移动基座205上存在圆柱形凸台,圆柱形凸台和活检针过盈配合,带动活检针同步运动。活检针从固定基座201预留孔轴向伸出;当撤去外磁场,由于磁场的相互作用力,动子永磁体204和移动基座205同时向胶囊末端移动,活检针回复至保护壳206范围内,完成采样过程。重复施加或撤去外部磁场,可以完成多次采样操作。
图4是本发明一种集成了磁控活检机构的胶囊内窥镜的正视剖视图。从图4可以看出采样装置相对于胶囊内窥镜整体尺寸较小,易于吞服。固定基座201与胶囊外壳过盈配合,位置始终保持不变,固定基座201上留出适合活检工作头202通过的孔的位置,具有导向作用。采用最外层的保护壳206,和固定基座201过盈配合,相当于固定在胶囊外壳表面,将其余等不易直接与人体环境接触的零件隔离。集成了活检装置的胶囊内窥镜相比原始状态,内部结构未改变,厚度略增加,装置前端胶囊内窥镜机器人头尾部过渡处平齐,后端为圆弧型过渡,整体仍呈胶囊形态,易于吞服。
图5是本发明一种集成了磁控活检机构的胶囊内窥镜的驱动初始状态图(未加保护壳206)。图6是本发明一种集成了磁控活检机构的胶囊内窥镜的驱动完成状态图(未加保护壳206)。
从图5可以看出,未受磁场力,定子永磁体202和动子永磁体204异名磁极相互排斥,活检工作头203位于保护壳206范围内,防止活检工作头203尖端对人体造成损害。从图6可以看出,受到外加磁场,克服两磁体之间的磁场力,动子永磁体204带动活检工作头203伸出,进行采样操作。此时,活检工作头203伸出范围达到最大值,动子永磁体和定子永磁体之间留有一段空隙,因为磁体间排斥力无法实现完全重合。
图7至图9是本发明一种集成了磁控活检机构的胶囊内窥镜的采样过程示意图(未加保护壳206)。所述一种胶囊内窥镜的磁控活检机构在实际场景中的描述如下:
磁控胶囊内窥镜系统由胶囊内窥镜,胶囊内镜导航系统、实时监控系统和数据记录仪组成。胶囊内窥镜的采样装置中包括永磁体,因此,在胃镜检查过程中,人体吞服含有磁性材料的胶囊机器人,通过胶囊内镜导航系统产生的外部磁场,产生足够的力和力矩控制胶囊的运动,使其能在胃内倾斜、平移、旋转,同时改变受检者体位配合检查,并以数字信号无线实时传输给体外携带的数据记录仪,医生通过实时监控系统观察记录仪收到的图像资料即可对病情做出分析诊断。
如图7发现目标采样点所示,开始检查,寻找到可疑病灶。
如图8到达目标采样点所示,通过胶囊内镜导航系统变换外部磁场大小与方向,调整胶囊姿态,使胶囊头部和采样组织平面保持垂直,此时施加于活检装置上的磁力不足以使活检针伸出。如病变采样位置较特殊,通过变换外部磁场大小与方向,使得胶囊转动一定角度后,完成活检过程。
如图9采集样本组织所示,通过外磁场施加一个足以克服采样装置定子永磁体202和动子永磁体204之间的磁场力的较大磁场力,使采样装置中动子永磁体204沿轴向运动,活检工作头203缓慢伸出。当活检工作头203接触到活检组织,前端的压力传感器处于正常范围且在阈值内,则继续增加外磁场,使动子永磁体204带动活检工作头203插入目标组织。同时排斥定子永磁体202,使胶囊对于胃肠道内壁的压力减小。若压力超出正常范围,则通过调整胶囊内镜导航系统中探头位置改变磁场和压力传感器的值,以避免磁场过大造成对人体的伤害,该过程可以通过胶囊内镜导航系统自动进行调整。
如图10离开目标采样点所示,活检工作头203采样结束后,通过胶囊内镜导航系统撤去磁场,定子永磁体202使动子永磁体204回复至原位置,活检工作头203回收,则采样完成。之后通过再次施加外磁场,完成剩余检查过程。
检查完成后,通过利用永磁体或电磁场产生外磁场,使活检工作头203从保护壳206内伸出,提取采样组织,进行病灶分析。
本发明提供的一种应用于磁驱动胶囊内窥镜的磁控活检机构,具有以下优点:
1.在现有商业胶囊内窥镜的基础上,无需更改现有内部结构,外置集成采样装置,减小了对于胶囊内部空间的使用,装置结构简单、高效。
2.装置的驱动力来自外磁场,无需消耗胶囊内窥镜机器人自身的能量,减小对人体的损害。
3.装置可以通过多次施加外磁场,反复进行采样活检操作,提高采样成功率;
4.活检工作头从轴向伸出,增大了采样范围,易于位于胶囊头部的摄像头和外磁场配合,实时监控整个采样过程。
5. 在外磁场的作用下,动子永磁体被吸引,定子永磁体被排斥,减小了胶囊对于胃肠道内壁的压力。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种胶囊内窥镜的磁控活检机构
- 一种磁控装置及磁控胶囊内窥镜系统