一种用于空间机械臂末端工具更换的快锁机构
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于航天工程空间机构技术领域,特别涉及一种用于空间机械臂末端工具更换的快锁机构。
背景技术
随着航天探索活动的不断推进,空间机械臂技术得到越来越广泛的应用,空间机械臂可以在舱内自主或协助航天员完成科学实验、载荷维修、在轨制造等工作,也可以代替航天员完成出舱巡检、设备更换、物品搬运等工作,既降低了航天员的工作强度,也规避了航天员出舱所面临的风险。
一种空间站机械臂,其任务是在轨完成玻璃擦拭、样品搬运以及携带紫外灯进行设备表面消毒等工作,为适用不同的工作任务,需要在其末端安装、更换不同的末端工具。当前工业领域的机械臂末端工具更换,大多采用法兰式结构对接安装、外部连接线缆或气管的方式。根据任务需求,在轨需要频繁更换空间机械臂末端工具,并且要保证更换之后的安装精度,如果采用传统的更换方式,意味着航天员每次更换工具都需要旋拧法兰上的若干个螺钉,在微重力环境下这种操作对航天员的劳动强度与技能是极大挑战。因此,需要设计一种适用于空间机械臂末端工具频繁更换的工具,具备更换快速、操作简便、安全高效、锁紧可靠等功能。
发明内容
针对上述问题,本发明的目的在于提供一种用于空间机械臂末端工具更换的快锁机构,具有更换快速、操作简便、安全高效、锁紧可靠等功能,达到快速更换机械臂末端工具的目的。
为了实现上述目的,本发明采用以下技术方案:
一种用于空间机械臂末端工具更换的快锁机构,包括母头和公头;
母头包括母头基座、钢球、钢球锁紧机构及电连接器插座,其中母头基座的一端为凹槽型结构,电连接器插座设置于凹槽的底部,用于与公头对接;凹槽的侧壁上沿周向设有多个钢球;
钢球锁紧机构设置于母头基座的外侧,用于对钢球进行压紧或释放,当钢球被压紧时对公头进行锁紧。
所述钢球锁紧机构包括锁紧套筒和锁紧弹簧,锁紧弹簧和锁紧套筒由内到外依次套装在装在所述母头基座的外侧,且锁紧弹簧的两端分别与母头基座和锁紧套筒抵接;
所述母头基座的上端设有用于对所述锁紧套筒进行轴向限位的限位结构。
所述母头基座外圆周的下端设有定位止口,所述锁紧套筒的上端内壁沿周向设有环形压紧部;
所述锁紧弹簧的两端分别与所述母头基座的定位止口和所述锁紧套筒的环形压紧部抵接。
所述限位结构包括限位卡簧,限位卡簧容置于所述母头基座外圆周上设有的卡簧槽内。
所述母头基座的凹槽内壁上设有导向定位键。
所述电连接器插座上设有导向杆。
所述公头包括公头基座及设置于所述公头基座上的电连接器插头;
所述公头基座的外圆周上设有用于与所述钢球配合的沟槽。
所述公头基座为阶梯轴结构,其小直径端为插接端;所述电连接器插头设置于所述插接端的端部;所述沟槽设置于所述插接端的外圆周上。
所述电连接器插头上设有导向孔。
所述插接端的外圆周上设有导向定位槽。
本发明的优点及有益效果是:
本发明操作更快速、简便:航天员通过拉动锁紧套筒即可实现机械臂与末端工具的连接与断开,省去了传统更换方式中的拧螺钉、对插电连接器等操作,可快速、简便实现工具更换。
本发明工作更安全:电连接器置于结构内部,机构外部没有线缆,工作中规避了线缆破损等危险情况,系统更安全、可靠,设备寿命更长久。
附图说明
图1为本发明一种用于空间机械臂末端工具更换的快锁机构的结构示意图;
图2为本发明中母头的轴测图;
图3为本发明中母头的剖视图;
图4为本发明中公头的轴测图;
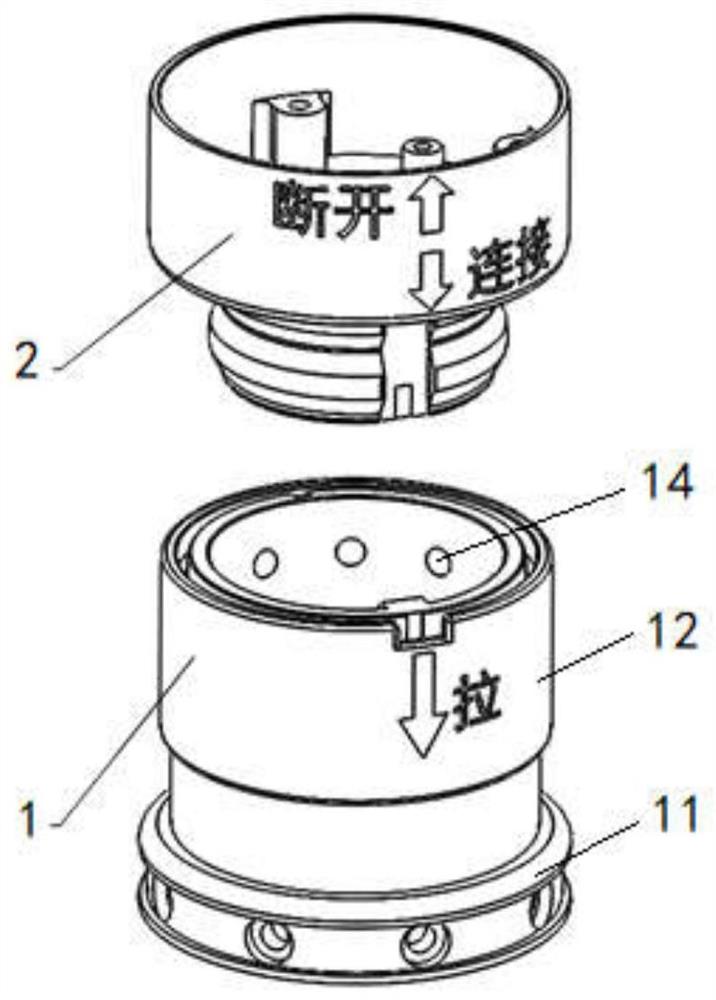
图5为本发明中母头连接准备示意图;
图6为本发明中公头与母头的连接结构示意图。
图中:1为母头,11为母头基座,12为锁紧套筒,121为环形压紧部,13为锁紧弹簧,14为钢球,15为限位卡簧,16为电连接器插座,17为导向定位键,18为导向杆;
2为公头,21为公头基座,22为电连接器插头,23为沟槽,24为导向定位槽,25为导向孔。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1-2所示,本发明提供的一种用于空间机械臂末端工具更换的快锁机构,包括母头1和公头2;
母头1包括母头基座11、钢球14、钢球锁紧机构及电连接器插座16,其中母头基座11的一端为凹槽型结构,电连接器插座16设置于凹槽的底部,用于与公头2对接;凹槽的侧壁上部沿周向均匀布置若干个钢球孔,在每个钢球孔中安装一个钢球14。钢球锁紧机构设置于母头基座11的外侧,用于对钢球14进行压紧或释放,当钢球14被压紧时对公头2进行锁紧。
如图3所示,本发明的实施例中,钢球锁紧机构包括锁紧套筒12和锁紧弹簧13,锁紧弹簧13和锁紧套筒12由内到外依次套装在装在母头基座11的外侧,且锁紧弹簧13的两端分别与母头基座11和锁紧套筒12抵接;母头基座11的上端设有用于对锁紧套筒12进行轴向限位的限位结构,通过限位结构使锁紧弹簧13具有一定的预紧力。
具体地,母头基座11外圆周的下端设有定位止口,锁紧套筒12的上端内壁沿周向设有环形压紧部121;锁紧弹簧13的两端分别与母头基座11的定位止口和锁紧套筒12的环形压紧部抵接。
本发明的实施例中,限位结构包括限位卡簧15,限位卡簧15容置于母头基座11外圆周上设有的卡簧槽内。限位卡簧15位于锁紧套筒12的环形压紧部121上方,对锁紧套筒12轴向进行限位。
进一步地,如图2所示,母头基座11的凹槽内壁上设有导向定位键17,用于与公头2对接时进行导向、定位,并在连接完成后约束母头1与公头2之间的转动自由度,可承受一定的旋转力矩负载。
进一步地,电连接器插座16上设有两个导向杆18,用于电连接器对接时的导向,以提高对接的精度。
如图4所示,本发明的实施例中,公头2包括公头基座21及设置于公头基座21上的电连接器插头22,公头基座21的外圆周上设有用于与钢球14配合的沟槽23,电连接器插头22用于与母头1上的电连接器插座16插接。
本实施例中,公头基座21为阶梯轴结构,其小直径端为插接端;电连接器插头22设置于插接端的端部,沟槽23设置于插接端的外圆周上。钢球14与沟槽23配合能实现对公头2的快速锁紧。
进一步地,电连接器插头22的两侧设有导向孔25,插接端的外圆周上设有导向定位槽24。当公头2和母头1进行插接时,通过公头2上的导向定位槽24与母头1上的导向定位键17配合进行导向,且承载旋转负载;同时母头1上的两个导向杆18插入公头2上的两个导向孔25内,完成电连接器插头22和电连接器插座16的准确对接。电连接器插头22的螺钉安装位置下设置有弹簧容错装置,可以允许电连接器插座16与电连接器插头22之间对接过程中存在的一定径向偏差。
本实施例中,母头1安装于空间机械臂末端,母头基座11下部设有与机械臂末端的安装接口,通过法兰与机械臂末端实现高刚度结构连接。母头1提供对公头2的连接锁紧功能,可同时实现结构与电气的连接,约束公头2的六个运动自由度。公头2安装于末端工具上,提供与母头1的对接接口,可实现末端工具与母头1的快速连接与断开,为末端工具提供机械约束与电气连接。
如图3所示,在母头1与公头2断开状态下,锁紧弹簧13的预紧力将锁紧套筒12挤压靠近限位卡簧15,使锁紧套筒12与母头基座11的上端面平齐。电连接器插座16安装于母头1的中间位置,用于母头1与公头2对接的电气连接,包括电源与通讯信号。
本发明的实施例中,快锁机构的母头1与公头2的连接过程分为两步:
(1)连接准备:将锁紧套筒12向压缩锁紧弹簧13的方向拉压,释放钢球14在径向的约束,使钢球14可以在径向方向向外运动,如图5所示。
(2)连接锁紧:将公头2的导向定位槽24与母头1的导向定位键17对准,并插入母头1的凹槽内;释放锁紧套筒12,在锁紧弹簧13的压力下,钢球14嵌入公头2的沟槽23内,实现连接锁紧,并且由于导向定位键17与导向定位槽24的配合可约束转动自由度。另外,公头基座21与母头基座11之间为轴孔配合,可约束倾覆运动自由度,因此连接锁紧后可同时约束公头2的六个运动自由度,实现可靠连接。在机械连接完成的同时,电连接器插座16与电连接器插头22之间也完成了对插,实现了电气的同步连接,如图6所示。
快锁机构的母头1与公头2断开过程分也为两步:
(1)断开准备:将锁紧套筒12往压缩锁紧弹簧13的方向拉压,释放钢球14在径向的约束,使钢球14可以在径向方向向外运动。
(2)断开:将公头2从母头1中拔出,断开机械与电气连接。
本发明提供的一种用于空间机械臂末端工具更换的快锁机构,将首次应用于空间站的机械臂末端工具更换,创新设计的机、电一体化对接锁紧方式,使机械臂末端工具更换过程简便、快速,也安全可靠,不但解决了传统机械臂末端工具更换过程繁琐的问题,也大大提高了工作效率,降低了航天员在轨操作的劳动强度。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种用于空间机械臂末端工具更换的快锁机构
- 用于空间机械臂末端工具更换的快锁机构