织物矫正方法及柔性整纬机
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及一种矫正方法及设备,具体是涉及一种织物纬斜、纬弯及花形变形的矫正方法及整纬机,属于纺织设备及工艺技术领域。
背景技术
织物在织造及后整理过程中,因受设备精度误差、各种机械运动以及人为操作的影响,经常会产生纬斜、纬弯、花形歪斜和花形弯曲,影响后序加工,从而影响成品面料的质量,降低纺织品的使用价值,因此,需要使用整纬机对织物纹理及花形畸变进行矫正。
现有的整纬机包括若干个矫正辊、检测织物纹理及花形的织物检测装置以及电控制器,矫正辊包括矫正纬斜的直辊与矫正纬弯的弯辊;直辊安装在纬斜框内,且纬斜框可以被驱动转动,使得直辊与织物纬纱不再平行,实现矫正纬斜;弯辊是在弯辊芯轴上活套一根带有橡胶辊面的钢套管,钢套管可绕弯辊芯轴回转,而弯辊芯轴自身也可以回转,钢套管回转时,实现矫正纬弯;当织物以一定的压力紧贴直辊或弧形橡胶辊面,就改变了织物经纱的相对运行速度,使纬纱弯斜的相应部分“超前”或“滞后”,从而恢复纬纱与经纱在全幅内的垂直相交,即得到了矫正辊整纬的效果。
现有整纬机中多个直辊安装在纬斜框内,纬斜框设有转动轴,纬斜框的一侧设有用于驱动纬斜框转动的驱动组件,纬斜框的位置由于齿条、齿轮之间有运动间隙等多种因素,检测电位器不能完全精准的反映该纬斜框内直辊的实际位置状态,从而会影响织物纬斜的矫正效果;另外,由于齿条、齿轮的开放式结构需经常维护,因此增加了设备的使用成本。
现有整纬机中弯辊是通过电机、传动轴并经链轮链条传动机构带动弯辊芯轴回转,传动轴的轴身与整纬机的机架转动连接。当传动轴驱动弯辊芯轴回转时,由于传动轴的径向跳动等因素,链轮容易疲劳损坏,时常造成链条传动不畅,加大功率消耗,加速链条和链轮的磨损,链条易绷断,甚至发生事故,不利于安全生产,影响染整工艺流程的正常配套运行,维修费用高,增加了使用成本。
而且,现有整纬机是使用多个直辊、弯辊通过调节织物行程来对织物变形进行矫正,一方面,现有整纬机无法对局部区域、小片段及不规律的纬斜、纬弯及花形变形进行矫正,而且矫正量也无法精准微调,导致矫正精度低,无法达到全幅织物精细化、精准矫正;另一方面,现有整纬机由于需要通过多个直辊、弯辊对织物进行矫正,机械结构较为复杂,调节行程也较长,属于较大延时的系统,响应慢,不利于实时矫正控制,无法高精度整纬,产品质量难以提高;再一方面,现有整纬机由于全幅对织物施加张力,过大或过小都会造成整纬机内的织物过度牵伸或堆布,因此容易出现织物过度牵伸和卷边的现象;另外,现有整纬机对一些延伸性大、受外力极易变形的针织物、结构疏松的织物如雪纺等,也不能有效矫正,应用范围小。针对这些问题,目前尚无解决方案。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种不仅能对局部区域、小片段及不规律的纬斜、纬弯及花形变形进行有效矫正,而且矫正量可精准微调,能实现实时矫正、响应速度快、矫正精度高、不会出现过度牵伸或堆布、应用范围广的织物矫正方法。同时,本发明还提供一种柔性整纬机,该柔性整纬机能对局部区域、小片段及不规律的纬斜、纬弯及花形变形进行矫正,矫正量可精准微调,能实现实时矫正,响应速度快,矫正精度高,不会出现过度牵伸或堆布,结构简单,使用成本低,适用范围广。
为解决上述技术问题,本发明采用这样一种织物矫正方法,采用织物矫正装置对织物纬纱变形花形变形进行矫正,所述织物矫正装置包括至少三个沿织物幅向布置具有独立驱动转动件的矫正机构,所述转动件的转动受控于电控制器,该方法包括根据织物纬纱或花形变形状况,电控制器控制纬纱或花形变形区域的转动件转速和/或转向,对纬纱或花形变形进行矫正。
作为本发明的一种优选实施方式,该方法还包括在转动件对纬纱或花形变形矫正之前和/或转动件对纬纱或花形变形矫正之后,通过织物检测装置采集运行中织物的纬纱、花形状况数据,并把采集到的数据传输给电控制器的步骤。
作为本发明的一种优选实施方式,所述电控制器控制纬纱或花形变形区域的转动件转速和/或转向,纬纱或花形变形区域的转动件与织物接触,对纬纱或花形变形进行矫正,具体是:根据织物纬斜、纬弯或者花形变形、幅向变异的区域位置以及变异量执行如下控制,
(1)当织物的纬斜、纬弯或者花形变形方向与织物运行方向一致时,电控制器依据纬纱或花形变异量对应地减小相应变形区域的转动件转速和/或电控制器改变位于纬纱或花形变形区域的转动件转向,对纬斜、纬弯或者花形变形进行矫正;
(2)当织物的纬斜、纬弯或者花形变形方向与织物运行方向相反时,电控制器依据纬纱或花形变异量对应地加快相应变形区域的转动件转速,对纬斜、纬弯或者花形变形进行矫正。
为解决上述技术问题,本发明采用这样一种柔性整纬机,包括织物矫正装置、织物检测装置以及电控制器,所述织物检测装置与电控制器连接,织物矫正装置受控于电控制器,所述织物矫正装置包括至少三个沿织物幅向布置具有独立驱动转动件的矫正机构,所述转动件的转动受控于电控制器。
作为本发明的一种优选实施方式,所述矫正机构包括轴、安装在轴上的套筒以及驱动机构,所述轴安装在柔性整纬机的机架上或者独立设置的支承架上,所述套筒作为转动件,所述套筒由驱动机构驱动转动,驱动机构受控于电控制器。
作为本发明的一种优选实施方式,所述矫正机构包括外转子电机,所述外转子电机安装在柔性整纬机的机架上或者独立设置的支承架上,外转子电机的外转子作为转动件,外转子电机受控于电控制器。
作为本发明的一种优选实施方式,所述矫正机构包括环形矫正带、主动轮、被动轮和电机;所述矫正带作为转动件,所述主动轮与电机相连,矫正带安装在所述主动轮与被动轮之间,主动轮、被动轮安装在整纬机的机架上或者独立设置的支承架上,电机受控于电控制器。
作为本发明的一种优选实施方式,所述柔性整纬机还包括织物张力检测机构,所述织物张力检测机构设置在织物矫正装置的进布侧和/或出布侧,所述织物张力检测机构与电控制器连接;所述织物检测装置包括工业相机或光电传感器,工业相机或光电传感器与电控制器连接,所述织物检测装置设置在织物矫正装置的进布侧和/或出布侧。
作为本发明的一种优选实施方式,在所述织物矫正装置的进布侧和/或出布侧设有牵引织物的牵引辊,所述牵引辊的转动由牵引电机驱动,牵引电机受控于电控制器;所述织物矫正装置还包括矫正直辊和/或矫正弯辊。
作为本发明的一种优选实施方式,所述电控制器是具有人机操作界面的数字控制器或者嵌入式工业控制器或者工控机或者PLC可编程控制器。
采用上述技术方案后,本发明具有以下有益效果:
本发明采用的一种织物矫正装置,其包括至少三个沿织物幅向布置具有独立驱动转动件的矫正机构,转动件的转动受控于电控制器,根据织物纬纱或花形变形状况,电控制器控制纬纱或花形变形区域的转动件转速和/或转向,将纬纱或花形变形区域的转动件与织物接触,对纬纱或花形变形进行矫正。工作时,将织物幅向矫正区域分段细化,通过电控制器控制位于纬纱或花形变形区域的转动件转速和/转向,对局部区域、小片段及不规律的纬斜、纬弯或者花形变形进行有效矫正,并且在矫正时,矫正量可单个独立精准微调,响应速度快,调速范围大,矫正精度高,可以很好地矫正在纺织品某一部位的局部纬斜、纬弯或者花形变形、没有规律形状的错综复杂的纬斜、纬弯或者花形变形以及全幅直线、弧形、吊角纬斜、纬弯或者花形变形等;而且,对织物的组织结构参数、纬纱的偏移量无指定要求,可以完成现有直辊、弯辊无法矫正的纬斜、纬弯或者花形变形。
本发明能仅针对织物变形部分实施与之相适应的矫正张力,因此不会出现过度牵伸或堆布,避免了现有整纬机全幅对织物施加张力,导致因张力过大或过小造成整纬机内的织物过度牵伸或堆布,出现织物过度牵伸和卷边的问题。
本发明能矫正现有直辊、弯辊无法矫正的延伸性大、受外力极易变形的针织物,结构疏松的织物,如雪纺等,应用范围广。针织物纬斜/弯斜是线圈偏离垂直于织物纵行的直线,即针织物串联在一起的横列线圈离开了平衡状态,现有整纬机通常将织物全幅矫正,但无法达到有效矫正的目的。而本发明可以在针织物的横列线圈弯斜的起始部位,也仅仅只需要在线圈弯斜状态起始部位加速或降低该区域的转动件运行速度,使其恢复垂直于织物纵行直线,与起始部位串联在一起其他线圈弯斜也会顺势获得矫正。
本发明的织物矫正装置包括至少三个沿织物幅向布置具有独立驱动转动件的矫正机构,其具有极低的延迟,更快的响应时间,更佳的性能;完全避免了现有技术机械结构较复杂、调节行程较长、属于较大延时系统、响应慢的属性。本发明克服了现有技术的瓶颈,可针对小片段、不规律等变形状况进行实时矫正。
本发明能按需要控制各转动件的运行速度,在织物的幅向可以形成多种速度组合,矫正纬斜、纬弯或者花形变形时,对织物是否居中以及织物的门幅无要求,能自适应织物矫正时的进布状态,使用方便。而现有技术中的直辊、弯辊,若织物门幅小于直辊、弯辊工作宽度,矫正效率则相应下降,矫正效果大幅下降,而且,织物进入现有整纬机必须处于良好的居中状态,否则弯辊会相反地成倍加大变形程度。因此,本发明无限制性应用条件,极大地优化了整纬工作条件。
本发明只需要对所有的转动件同时增加或减小同一速度增量,就可获得工艺要求的整纬张力,非常有利于实现高精度织物。对比现有技术的低弹机织物整纬时,调节直辊的角度后,全幅向内的织物不再全部包覆直辊,会出现织物悬垂,无法准确矫正纬斜/纬弯,因此,本发明应用范围更广。
本发明结构简单、合理,使用成本低,安装便利,操作简便,维护方便,可靠性高。
附图说明
以下结合附图对本发明的具体实施方式作进一步的详细说明。
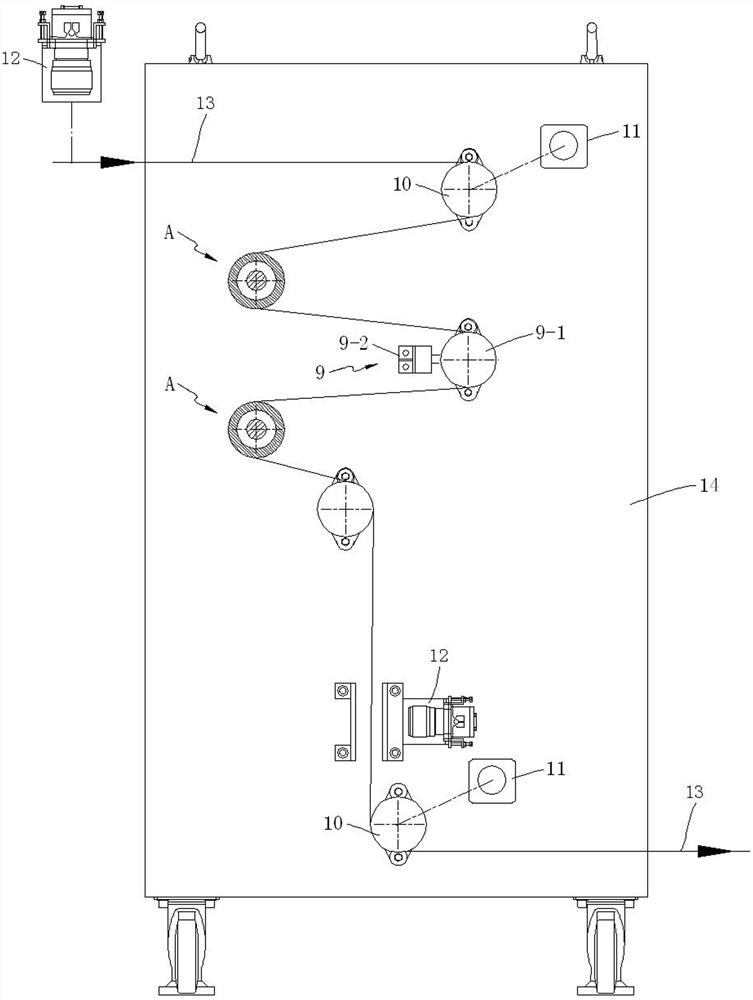
图1为本发明柔性整纬机的一种优选实施例结构示意图。
图2为本发明中织物矫正装置的第一种优选实施例结构示意图。
图3为图2中沿B-B线的剖面示意图。
图4为图3的立体示意图。
图5为本发明中织物矫正装置的第二种优选实施例结构示意图。
图6为图5的主视示意图。
图7为图6中沿以C-C线的剖面示意图。
图8为本发明中织物矫正装置的第三种优选实施例结构示意图。
图9为图8的主视示意图。
图10为本发明中织物矫正装置的第四种优选实施例结构示意图。
图11为本发明中织物矫正装置的第五种优选实施例结构示意图。
图12为图11的侧视示意图。
图13为图11的俯视示意图。
图14为本发明中织物矫正装置的第六种优选实施例结构示意图。
具体实施方式
参见图1至图14,一种织物矫正方法,采用织物矫正装置对织物13纬纱变形花形变形进行矫正,所述织物矫正装置包括至少三个沿织物13幅向布置具有独立驱动转动件的矫正机构,所述转动件的转动受控于电控制器,该方法包括根据织物纬纱或花形变形状况,电控制器控制纬纱或花形变形区域的转动件转速和/或转向,对纬纱或花形变形进行矫正。在本发明中,所述纬纱包括机织物纬纱和针织物纬纹等,花形包括印花、提花、色织花和绣花等。
作为本发明的一种优选实施方式,该方法还包括在转动件对纬纱或花形变形矫正之前和/或转动件对纬纱或花形变形矫正之后,通过织物检测装置采集运行中织物13的纬纱、花形状况数据,并把采集到的数据传输给电控制器的步骤。
作为本发明的一种优选实施方式,所述电控制器控制纬纱或花形变形区域的转动件转速和/或转向,纬纱或花形变形区域的转动件与织物接触,对纬纱或花形变形进行矫正,具体是:根据织物纬斜、纬弯或者花形变形、幅向变异的区域位置以及变异量执行如下控制,
(1)当织物的纬斜、纬弯或者花形变形方向与织物运行方向一致时,电控制器依据纬纱或花形变异量对应地减小相应变形区域的转动件转速,纬纱或花形变异量与转动件转速减小量是单调递增关系,即变异量越大,则转动件降速越大,和/或电控制器改变位于纬纱或花形变形区域的转动件转向例如反转,使纬纱弯斜的相应部分“滞后”,从而恢复纬纱与经纱在全幅内的垂直相交,对纬斜、纬弯或者花形变形进行矫正;
(2)当织物的纬斜、纬弯或者花形变形方向与织物运行方向相反时,电控制器依据纬纱或花形变异量对应地加快相应变形区域的转动件转速,使纬纱弯斜的相应部分“超前”,从而恢复纬纱与经纱在全幅内的垂直相交,对纬斜、纬弯或者花形变形进行矫正。
参见图1至图14,一种柔性整纬机,包括织物矫正装置、织物检测装置以及电控制器,所述织物检测装置用于检测织物纬斜、纬弯及花形变形,织物检测装置与电控制器连接,织物矫正装置受控于电控制器,所述织物矫正装置包括至少三个沿织物幅向布置具有独立驱动转动件的矫正机构A,所述转动件的转动受控于电控制器。在本发明中,所述至少三个矫正机构A可以沿织物13幅向间隔或者依次布置,如图2、5~11所示;也可以沿织物13幅向前后交替呈品字型布置,还可以沿织物幅向以其它方式布置,图中未示。
作为本发明的一种优选实施方式,如图2、3、4所示,所述矫正机构A包括轴1、安装在轴1上的套筒2以及驱动机构3,所述轴1安装在柔性整纬机的机架14上或者独立设置的支承架上,所述套筒2作为转动件,所述套筒2由驱动机构3驱动转动,驱动机构3受控于电控制器。在安装时,参见图2、3和4,轴1的一端或两端固定安装在柔性整纬机的机架14上或者独立设置的支承架上,套筒2通过轴承2-1转动地安装在轴1上,驱动机构3优选包括电机3-1和传动带例如皮带或同步带传动机构3-2,在套筒2的一端开设有皮带槽2-2,皮带或同步带置于皮带槽2-2内,电机3-1的驱动器通过有线电缆或无线信号与电控制器连接,电控制器可通过驱动机构3控制套筒2以不同转速或同一转速运行。本发明的套筒2可以是空心圆柱形状,也可以是导布轮、辊筒、滚轮等形状;每个套筒2的外径优选均相同;套筒2的外周优选全部或部分涂覆或者设置有摩擦材料层,摩擦材料层优选采用摩擦系数较大的材料例如橡胶等制成;本发明的驱动机构3也可以是电机3-1和链条传动机构或者齿轮传动机构或者摩擦传动机构,摩擦传动机构包括摩擦轮,套筒2由电机通过摩擦轮驱动转动,图中未示。参见图5、6和7,本发明的轴1也可以是一根长轴,各套筒2相互间隔、分别通过轴承2-1转动地安装在轴1上,即各套筒2安装在同一根轴上,驱动机构3及其它结构与第一实施例相同。在本发明中,所述驱动机构3中的电机3-1输出轴也可以直接与套筒2相连,即套筒2固定套装在电机3-1输出轴上,电机3-1固定安装在柔性整纬机的机架14上或者独立设置的支承架上,工作时,套筒2由电机3-1直接驱动转动,图中未示。
作为本发明的一种优选实施方式,如图8、9、10所示,所述矫正机构A包括外转子电机4,所述外转子电机4安装在柔性整纬机的机架14上或者独立设置的支承架上,外转子电机4的外转子作为转动件,外转子电机4受控于电控制器。在安装时,参见图8、9,各外转子电机4可相互间隔、独立固定安装在柔性整纬机的机架14上或者独立设置的支承架上,也可以前后交替呈品字型等方式固定安装在柔性整纬机的机架14上或者独立设置的支承架上,图中未示。参见图10,各外转子电机4也可以相互间隔、分别通过轴承4-1转动地安装在同一根轴15上,各外转子电机4通过有线电缆或无线信号与电控制器连接。工作时,电控制器可通过各外转子电机4控制各外转子以不同转速或同一转速运行。
作为本发明的一种优选实施方式,如图11、12、13所示,所述矫正机构A包括环形矫正带5、主动轮6、被动轮7和电机8;所述矫正带5作为转动件,所述主动轮6与电机8相连,矫正带5安装在所述主动轮6与被动轮7之间,主动轮6、被动轮7安装在整纬机的机架14上或者独立设置的支承架上,电机8受控于电控制器。所述矫正带5优选由耐磨材料例如橡胶等制成,矫正带5的横截面包括矩形、梯形、三角形、圆形。在安装时,参见图11、12、13,所述主动轮6优选通过皮带16与电机8相连,主动轮6、被动轮7优选分别通过长轴17、18及轴承转动、间隔安装在整纬机的机架14上或者独立设置的支承架上,长轴17、18的两端固定安装在机架14上,电机8的驱动器通过有线电缆或无线信号与电控制器连接,从而受控于电控制器。在本发明中,主动轮6、被动轮7优选是同步轮,所述矫正带5优选是同步带。另外,主动轮6、被动轮7也可以分别通过各自短轴及轴承转动地安装在整纬机的机架14上或者独立设置的支承架上,图中未示。工作时,矫正带5优选采用面接触方式对纬纱或花形变形进行矫正,当然也可采用线接触进行矫正。
作为本发明的一种优选实施方式,如图14所示,所述矫正机构A也可采用环形矫正带5、外转子电机4和被动轮7,矫正带5安装在所述外转子电机4与被动轮7之间,外转子电机4安装在柔性整纬机的机架14上或者独立设置的支承架上或者长轴19上,被动轮7通过轴承转动地安装在长轴20上,长轴19、20的两端固定安装在柔性整纬机的机架14上或者独立设置的支承架上,外转子电机4受控于电控制器,在实施时,外转子电机4通过有线电缆或无线信号与电控制器连接。工作时,电控制器可通过外转子电机4控制外转子以不同转速或同一转速运行,外转子电机的外转子带动矫正带5作环形运行。
作为本发明的一种优选实施方式,如图1所示,所述柔性整纬机还包括织物张力检测机构9,所述织物张力检测机构9设置在织物矫正装置的进布侧和/或出布侧,所述织物张力检测机构9与电控制器连接。所述织物张力检测机构9可采用常规结构,例如采用导布辊9-1以及力传感器9-2,所述力传感器9-2安装在导布辊9-1的一端或两端,所述力传感器9-2通过有线电缆或无线信号与电控制器连接;织物张力检测机构9还可采用其它常规结构,图中未示。所述织物检测装置包括工业相机12或光电传感器,图中未示光电传感器,工业相机12或光电传感器通过有线电缆或无线信号与电控制器连接,所述织物检测装置设置在织物矫正装置的进布侧和/或出布侧。工作时,工业相机12采集运行中织物13纹理及织物花形数据,并实时将数据传输给电控制器;电控制器根据这些采集到的数据,计算确定织物纬斜、纬弯或者花形变形方向、幅向变异的区域位置以及变异量的矫正参数,并依据该矫正参数,对与幅向变异的区域位置相关联的转动件按幅向变异量的分布,分别调整各转动件运行速度和/或运行方向,从而完成变形区域的纬斜、纬弯或者花形变形进行矫正。
作为本发明的一种优选实施方式,如图1所示,在所述织物矫正装置的进布侧和/或出布侧设有牵引织物13的牵引辊10,所述牵引辊10的转动由牵引电机11驱动,牵引电机11通过有线电缆或无线信号与电控制器连接,受控于电控制器;所述织物矫正装置还可包括现有整纬机中通常使用的矫正直辊和/或矫正弯辊,图中未示矫正直辊和矫正弯辊,通过矫正直辊和/或矫正弯辊进行辅助整纬。
在本发明中,所述织物矫正装置可以仅有1个,也可以有多个,例如2~5个等。
作为本发明的一种优选实施方式,所述电控制器是具有人机操作界面的数字控制器例如DDC数字控制器或者嵌入式工业控制器或者工控机或者PLC可编程控制器,图中未示电控制器。
经过测试,本发明能对局部区域、小片段及不规律的纬斜、纬弯或者花形变形进行精准矫正,响应速度快,没有出现过度牵伸或堆布,应用范围广,结构合理、简单,可靠性高,取得了良好的效果。
- 织物矫正方法及柔性整纬机
- 织物纹理及花形矫正方法及整纬机