一种基于视觉测量的智能悬挂输送系统及方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明属于自动化物流技术领域,尤其涉及一种基于视觉测量的智能悬挂输送系统及方法。
背景技术
悬挂输送机(输送机械)是一种常用的连续输送设备,广泛应用于连续地在厂内输送各种成件物品和装在容器或包内的散装物料,也可在各个工业部门的流水线中用来在各工序间输送工件,完成各种工艺过程,实现输送和工艺作业的综合机械化,其结构主要由牵引链条、滑架、吊具、架空轨道、驱动装置、张紧装置各安全装置等组成,对于大部分输送系统来说,只是单一的行进工作,并不具备自动化,其架空轨道高度固定,且架空轨道相对较低,对于生产间的的上半部未能完全利用,当架空轨道安装位置过高时,仓储中的大部分货物或者设备,往往需要再次借助叉车等工具放入指定的位置,进行仓库间的运输,为此我们需要设计一种安装于仓储或工作间上部位置,可以调节输送高度的输送系统,同时位置灵活,可实现曲线轨道运输的系统,针对较高位置绳索提升物料时,收卷不均与产生的抖动,我们也需要一种较好的低成本解决方案。
发明内容
本发明为解决上述背景技术中存在的技术问题,提供一种基于视觉测量的智能悬挂输送系统及方法。
本发明采用以下技术方案来实现:
一种基于视觉测量的智能悬挂输送系统,包括:
安装轴,用于固定悬挂输送装置和固定安装在基座上的动力装置,
悬挂输送装置,包括:双轨道,通过安装轴固定悬挂;
传送机构,滑动连接在双轨道上;传送机构上设有链条,链条用于连接动力装置和传送机构;
动力装置,顶端通过安装轴固定且底部设于基座上;
升降机构,固定安装在传送机构上;升降机构由换向机构和收卷机构组合,换向机构与安装在双轨道上多组换向轨道相配合,收卷机构用于根据实际工作状况收卷或放卷绳索,且绳索的端部设有用于连接物料的钩子。
通过采用上述技术方案,安装轴固定整个输送系统位置,传送机构用于传送物料,动力装置提供动力,升降机构则对物料进行升降,达到在提升与放下物料的输送过程,节省地面空间。
在进一步的实施例中,安装于基座上的动力装置包括:
安装在基座上的电机,传递电机动力的带轮传动,连接带轮传动另一端的换向机构,与换向机构输出端啮合的第一斜齿轮,固定安装第一斜齿轮且转动安装在基座上的转动轴,固定安装在转动轴上的第一齿轮,安装在转动轴上顶端的固定座。
通过采用上述技术方案,动力装置提供动力,最终传递到转动轴上,转动轴通过第二齿轮与传送机构连接,使得传送机构得以稳定工作。
在进一步的实施例中,换向机构包括:
固定安装在基座上的换向器外壳,通过轴承滚动安装于换向器外壳上端且与带轮传动连接的第一蜗杆,通过传动轴安装在换向器外壳底部且与第一蜗杆啮合的第一齿轮,传动轴与第一蜗杆垂直,安装在传动轴一端且与第一斜齿轮啮合的第二斜齿轮。
通过采用上述技术方案,换向机构主要对电机输出方向进行改变,同时本发明中通过第一蜗杆与第一齿轮啮合,进一步降低速度,最终传递到传送机构为一个较为稳定的速度。
在进一步的实施例中,双轨道包括:
安装在数个安装轴上的两条内外圈独立轨道,固定连接双轨道的轨道盖。
通过采用上述技术方案,双轨道通过轨道盖连接成整体,双轨道的设计,便于两个滑轮为一组,滑动时更加稳定。
在进一步的实施例中,双轨道由数段独立轨道固定连接而成,数段独立轨道曲线依据实际情况而定。
通过采用上述技术方案,双轨道的轨道路径有直线和曲线,利用这些结构的设计,可避开障碍物。
在进一步的实施例中,换向机构包括:
固定安装在连接轴下方的安装外壳,相互垂直贯穿安装外壳的通孔,通过轴承安装于通孔内且不相交的第二转轴和第二蜗杆,位于安装外壳外侧且安装在第二蜗杆两端的第三齿轮,与第三齿轮啮合且安装于双轨道上的多种换向轨道,多种换向轨道主要为内部轨道上或下轨道边只安装一条齿道的结构。
通过采用上述技术方案,换向机构实现换向主要通过第三齿轮在不同换向轨道的滑动,第三齿轮相反方向的转动,实现针对收卷机构的收卷和放卷功能。
在进一步的实施例中,收卷机构包括:
与第二蜗杆啮合且安装在第二转轴上的第三斜齿轮,安装于第二转轴中间的收卷器,收卷器收卷绳索。
通过采用上述技术方案,可实现收卷器收卷绳索功能,而第二蜗杆与第二转轴上的第三斜齿轮啮合,又能防止逆转,能够将物料提升至固定位置。
在进一步的实施例中,所述安装外壳侧面还安装视觉测量仪、控制电机和齿轮传动,在收卷器放卷绳索前,所述视觉测量仪测量所述收卷器至物料的距离,并将数值传入计算机中,计算机对比原始数据数据,将信号反馈至控制电机上,控制电机通过控制齿轮传动,旋转第二蜗杆,调整收卷器放卷绳索的量。
通过采用上述技术方案,利用控制电机控制第二蜗杆旋转,从而提前放卷部分绳索,节省换向轨道材料,便于对绳索到达物料位置进行及时调控,同时减轻整个悬挂装置的重量。
在进一步的实施例中,绳索采用多条工业用绳上固定安装多条平行横杆,构成类似于卷帘结构。
通过采用上述技术方案,收卷器收卷和方俊绳索时,处于平稳状态,不会产生大的晃动和收卷不均匀时物料的突然下降等问题。
一种基于视觉测量的智能悬挂输送方法,包括以下步骤:
步骤一、对物料的提取:启动电机,通过带轮传动和换向机构带动转动轴转动,转动轴通过第二齿轮与链条啮合带动传送机构工作,滚轮开始在双轨道上滑动,钩子连接物料,此时,升降机构中第三齿轮开始在第一类换向轨道上滑动,第二蜗杆转动,通过与第三斜齿轮啮合,带动第二转轴转动,收卷器开始放卷绳索,绳索到达接近物料位置。
步骤二、绳索位置及时的调整:视觉测量仪测量所述收卷器至物料的距离,并将数值传入计算机中,计算机对比原始数据数据,将信号反馈至控制电机上,控制电机启动控制齿轮传动,旋转第二蜗杆,再次调整收卷器放卷绳索直至合适位置,连接物料。
步骤三、对物料的传送:升降机构中第三齿轮进入第二类换向轨道,第三齿轮旋转方向与步骤一中第三齿轮旋转方向相反,此时,第二蜗杆反向转动,通过与第三斜齿轮啮合,带动第二转轴转动,收卷器开始收卷绳索,物料上至指定高度并且传送。
本发明的有益效果:该发明为一种可利用仓储或工作上部空间,通过换向机构和收卷机构的组合,可实现不同阶段对物料的升高,充分利用工作空间;同时位置灵活,利用双轨道自身设计的路径,配合链条本身的曲线特性以及链条链节之间的过盈配合,可实现曲线运输,灵活性高;对于本发明在高位置收卷绳索时可能产生的收卷偏差,我们利用设计过的绳索结构,使得该绳索结构近似于平面收卷,控制物料收卷或放卷时稳定。
附图说明
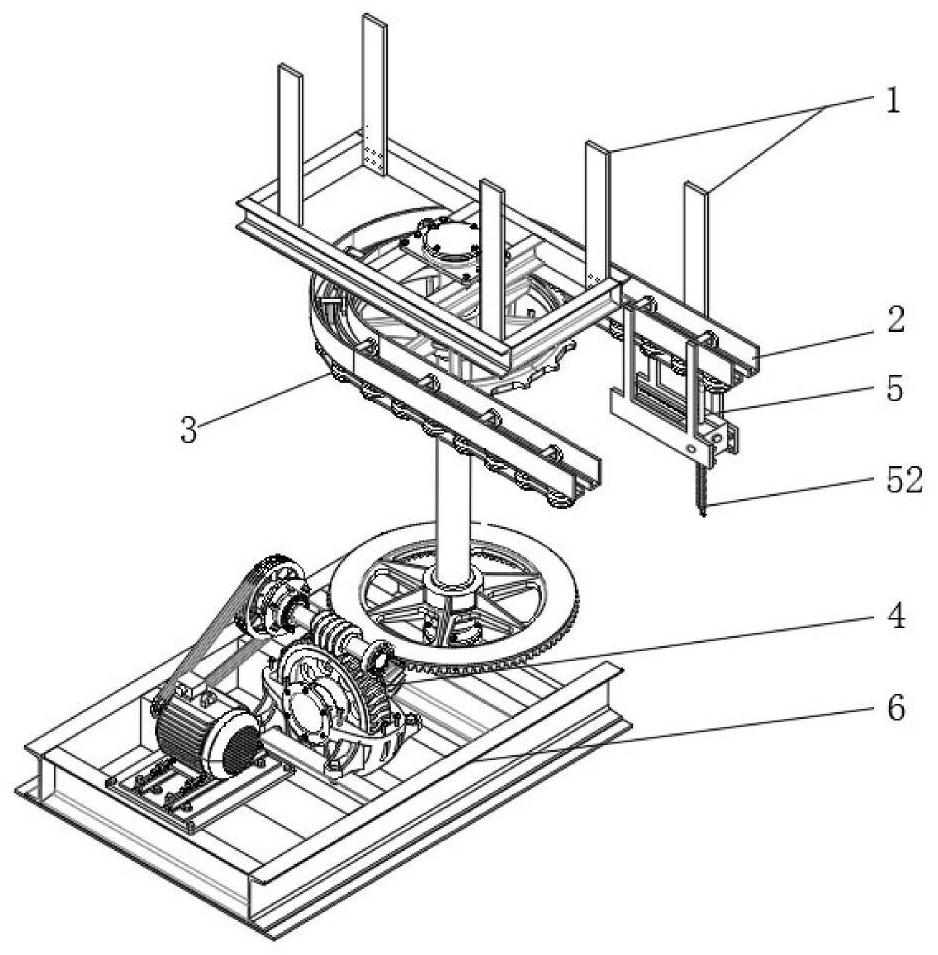
图1是本发明的整体结构示意图。
图2是本发明的动力装置结构示意图。
图3是本发明的传送机构结构示意图。
图4是本发明的升降机构结构示意图。
图5是本发明的换向机构结构示意图。
图6是本发明的绳索设计的结构示意图。
附图标记:安装轴1、双轨道2、轨道盖21、传送机构3、滑轮31、连接轴32、链条33、动力装置4、电机41、带轮传动42、第一蜗杆43、第一转轴44、第一齿轮45、第一斜齿轮46、第二斜齿轮47、转动轴48、第二齿轮49、升降机构5、换向机构51、第二蜗杆511、第三齿轮512、收卷机构52、第二转轴521、第三斜齿轮522、收卷器523、绳索524、钩子525、安装外壳53、换向轨道54、视觉测量仪55、齿轮传动56、控制电机57、基座6。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施;在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
进一步的实施例中,如图1到6所示,本实施例提供一种基于视觉测量的智能悬挂输送系统及方法,包括:安装轴1、输送装置、动力装置4、双轨道2、传送机构3、升降机构5和收卷机构52。
数根安装轴1通常安装在工作间或仓库间上部,用于悬挂和固定输送装置的位置,通过加强件固定连接双轨道2,使双轨道2悬挂,安装轴1之间可安装横轴,用于稳固所悬挂的双轨道2,同时还有数根安装轴1连接在动力装置4顶部,使得安装在基座6上的动力装置4在垂直方向上固定,便于动力装置4更好的传动动力。
传送机构3通过滑轮31在双轨道2上滑动,链条33设置在传送机构3上,动力装置4传递动力到链条33上,通过带动链条33的滑动,来带动传送机构3工作,因滚轮在双轨道2上滑动,摩擦力小,动力装置4可轻松带动链条33滑动。
升降机构5用于对物料进行升降,实现该运输系统的自动化,安装于传动机构底部,由换向机构51和收卷机构52组合而成,其中换向机构51与安装在双轨道2上多组换向轨道54相配合,通过换向机构51在不同的换向轨道54上滑动,实现收卷机构52对绳索524的收卷或放卷,绳索524底部可安装钩子525,用于勾住物料,最终对物料进行上升或下降,也可选用其他连接件,与物料配合或装物料的箱子结构相适应。
在进一步的实施例中,动力装置4为整个智能悬挂输送系统提供动力,该动力装置4可依据实际情况,安装多组动力装置4,在该动力装置4中,转动轴48可通过法兰盘安装在基座6上和固定座中间,同时可自由旋转,固定座通过安装轴1固定,电机41通过带轮传动42连接换向机构,换向机构51输出端的第一斜齿轮46与安装在转动轴48上的第二斜齿轮47啮合,转动轴48上端则安装与链条33啮合的第二齿轮49,电机41工作最终使得转动轴48旋转,带动链条33转动,从而使传动机构进行传送工作,其中电机41可选用步进电机41或者电路控制电机41的极端性工作。
在进一步的实施例中,该换向机构51中,换向器外壳固定安装在基座6上,且上下部分分别通过轴承安装第一蜗杆43和第一转轴44,第一蜗杆43连接带轮传动42,且与第一转轴44上的齿轮啮合,第一蜗杆43通过第一齿轮45带动第一转轴44转动,从而带动安装在第一转轴44一端的第一斜齿轮46转动,第一蜗杆43与第一齿轮45啮合将大幅度降低速度,该换向机构51主要用于换向和减速,换向器外壳为定制的模具,主要实现第一蜗杆43和传动轴空间上的垂直,便于第一蜗杆43和第一齿轮45啮合,更好的传递动能和减速。
在进一步的实施例中,双轨道2包括安装在安装轴1上的两条内外圈独立轨道,轨道盖21固定安装在双轨道2上方,使得双轨道2形成一个整体,便有整体的安装和稳定,双轨道2由数段独立轨道固定连接而成,数段所述独立轨道曲线依据实际情况而定,因双轨道2的轨道路径实际上控制着链条33的滑动路径,而本智能悬挂输送系统中的链条33设计为可水平向的自由滑动,双轨道2可多种曲线设计组合安装,利用该设计可完美避开障碍物,例如承重柱等无法移动的架构,同时利用多组动力装置4配合链条33使用,可实现远距离的输送。
因链条33由链节组合而成,链节处始终存在配合误差,为此可进一步将轨道设计成开环或闭环的螺旋结构,同时在动力装置4中的转动轴48配合安装第二个齿轮,实现多条路径同时输送物料。
在进一步的实施例中,传送机构3主要由两个滑轮31通过连接轴32连接,在双轨道2上滑动,连接轴32为T形结构,穿过链条33链节板且与链条33固定安装。通过滑动时较小的摩擦力实现链条33的自由滑动,同时使得输送物料更加快捷和稳定。
在进一步的实施例中,安装外壳53固定安装在连接轴32下方,同时用加强筋板加以固定,安装外壳53相互垂直贯穿相互垂直且不再同一平面内的通孔,通过轴承安装相互垂直且不相交的第二转轴521和第二蜗杆511,第三斜齿轮522安装在第二转轴521上,且与第二蜗杆511啮合,第二蜗杆511超出安装外壳53,超出部分的两端各安装第三齿轮512,第三齿轮512与安装于双轨道2上的换向轨道54相对滑动,其中换向轨道54主要为内部轨道上或下轨道边只安装一条齿道的结构,第三齿轮512在换向轨道54中内部轨道上轨道边安装齿道上滑动时,第二蜗杆511正向转动,通过第三斜齿轮522带动第二转轴521正向转动,当第三齿轮512在换向轨道54中内部轨道下轨道边安装齿道上滑动时,第二蜗杆511逆向转动,通过第三斜齿轮522带动第二转轴521逆向转动。
在进一步的实施例中,收卷器523安装在第二转轴521中间位置,收卷器523用于收卷和放卷绳索524,其中收卷和放卷绳索524取决于第三齿轮512在那种换向轨道54上滑动,同时收卷器523的收卷和放卷长度,可由换向轨道54内的内部轨道长度控制,可根据实际阶段输送物料时调节。
在进一步的实施例中,安装外壳53侧面还安装视觉测量仪55、控制电机41和齿轮传动56,,视觉测量仪55测量收卷器523至物料的距离,并将数值传入计算机中,计算机对比原始数据数据,在收卷器523放卷绳索524靠近物料时,将信号反馈至控制电机41上,控制电机41通过控制齿轮传动56,旋转第二蜗杆511,再次调整收卷器523放卷绳索524的量,最终连接物料。
在进一步的实施例中,绳索524采用多条工业用绳上固定安装多条平行横杆,构成类似于卷帘结构,通常收卷器523收卷普通绳子时,往往会收卷不均匀,在收卷或放卷过程中产生物料的突然下落小段距离,突然产生的受力会对输送装置产生局部影响,为此通过多条平行绳索524上安装平行横杆,将常规的绳子构成一种可收卷平面结构来避免此类影响。 工作原理:启动动力装置4,电机41通过带轮传动42与换向机构51连接,带轮传动42连接第一蜗杆43,第一蜗杆43与安装在第一转轴44上的第一齿轮45啮合,第一蜗杆43带动第一转轴44旋转,安装在第一转轴44一端的第一斜齿轮46与安装在转动轴48下端的第二斜齿轮47啮合,第一斜齿轮46旋转通过第二斜齿轮47带动转动轴48旋转,安装于转动轴48上端的第二齿轮49与链条33啮合,第二齿轮49带动链条33转动,双轨道2上方安装轨道盖21,内部轨道上设有滑轮31滑动,滑轮31通过“T”型连接轴32带动链条33运行,连接轴32穿过链条33链节板并固定安装,使链条33可以沿着双轨道2路线运行,连接轴32下端连接安装外壳53,安装外壳53内部安装垂直可旋转的第二转轴521和第二蜗杆511,第二蜗杆511与安装在第二转轴521上的第三斜齿轮522啮合,第二蜗杆511两端设有第三齿轮512,第二蜗杆511上还通过齿轮传动56与控制电机41连接,第三齿轮512在换向轨道54上滑动,当第三齿轮512滑入第一换向轨道54时,第二蜗杆511旋转,通过第三斜齿轮522带动第二转轴521旋转,此时位于第二转轴521上的收卷器523开始放卷绳索524,绳索524放卷一定长度靠近物料时,此时视觉测量仪55测量收卷器523至物料的距离,并将数值传入计算机中,计算机对比分析原始数据数据和第一类换向轨道控制绳索524的实际长度,将信号反馈至控制电机41上,控制电机41启动控制齿轮传动56,再次同方向旋转第二蜗杆511,再次调整收卷器523放卷绳索524直至指定位置,连接物料,接着,第三齿轮512滑入第二类换向轨道54,第二蜗杆511反方向旋转带动第二转轴521反方向旋转,此时收卷器523收卷连接物料的绳索524,提升物料至指定的高度并且传送。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 一种基于视觉测量的智能悬挂输送系统及方法
- 一种基于三目视觉的智能目标检测和测量系统及方法