应用于自动泊车的障碍物识别方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及自动驾驶领域,尤其涉及一种应用于自动泊车的障碍物识别方法。
背景技术
现有市面上的自动泊车的车位障碍物识别主要是依靠超声波雷达进行探测,其问题是无法探测到低矮障碍物,容易给出错误车位的判断,影响泊车安全和泊车成功率。虽然现有方案也有利用机器学习或者2D全景识别车位的尝试,但由于现有的深度学习算例过于复杂,资源分配难免出现紧张问题;而现有的基于2D环视识别车位的方案其漏检率和误检率也较高。
发明内容
鉴于上述,本发明旨在提供一种应用于自动泊车的障碍物识别方法,以克服现有方案的不足。
本发明采用的技术方案如下:
一种应用于自动泊车的障碍物识别方法,其中包括:
实时获取由四个鱼眼相机分别采集的图片,并采用畸变算法生成去畸变图片;
将去畸变图片融合为输入图像;
提取所述输入图像的多维图像特征,所述多维图像特征包括:灰度特征、颜色特征、梯度幅度特征以及梯度方向直方图特征;
将所述多维图像特征输入至基于预设的障碍物类型预先构建出的分类器组中,其中所述障碍物类型包括:人、限位牌、限位球、限位杆以及限位锁;
由所述分类器组中对应的独立分类器依次结合所述多维图像特征,识别出是否为对应的障碍物。
在其中至少一种可能的实现方式中,所述提取所述输入图像的多维图像特征包括:
利用预设的特征提取函数对所述输入图像进行处理并保存为新图像;
利用所述新图像构建高斯金字塔;
利用向下采样机制从所述高斯金字塔中获得多维图像特征。
在其中至少一种可能的实现方式中,所述高斯金字塔的构造方法为:以保存后的新图像作为最底层,且上一层为其下一层的图像尺寸的1/4,以此构造出五层高斯金字塔结构。
在其中至少一种可能的实现方式中,所述分类器组中对应各所述障碍物类型的独立分类器均采用Adaboost分类器。
在其中至少一种可能的实现方式中,所述独立分类器的训练及测试方式包括:
预先对图像样本的特征向量进行标注;
将标注后的图像样本基于不同的所述障碍物类型,分别输入至对应的Adaboost分类器中进行分类训练;
使用混淆矩阵作为评判训练效果的依据,并计算出对应的精确率和召回率;
若精确率和召回率低于预设的限定值,则持续优化Adaboost分类器的权重参数,直至精确率和召回率大于所述限定值。
本发明的构思在于,从鱼眼相机拍摄的图片中提取多维度的图像特征,并结合机器学习机制中的分类算法识别出既定的若干种障碍物类型。本发明有效规避了现有方案对于障碍物检测的识别率较低的问题,并且在一定程度上扩宽了自动泊车的应用场景,改善了自动泊车的功能体验。
附图说明
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
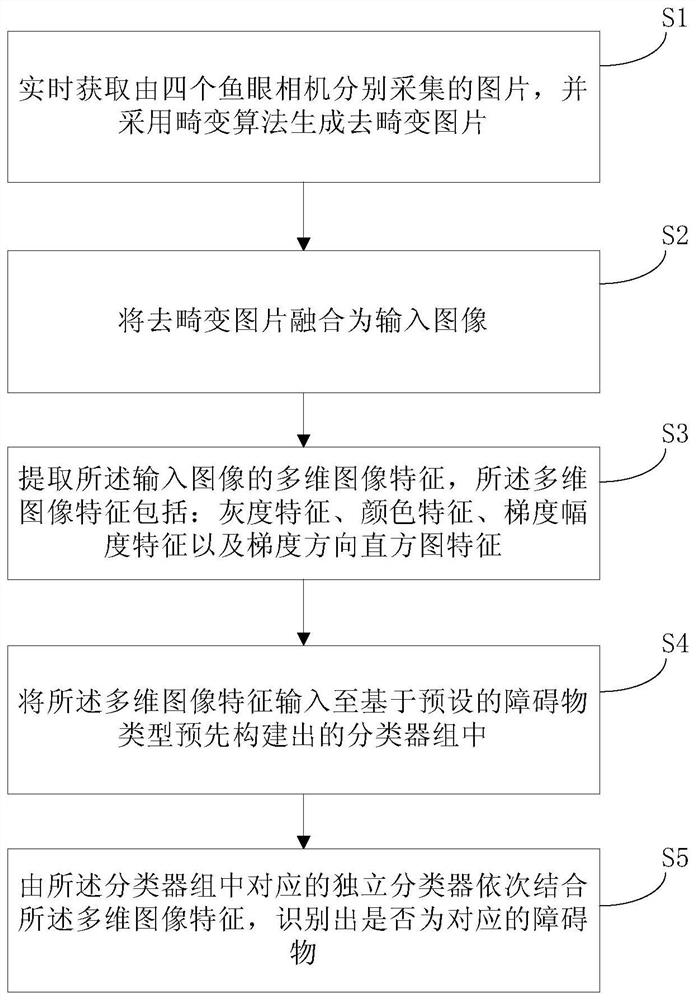
图1为本发明实施例提供的应用于自动泊车的障碍物识别方法的流程图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
本发明提出了一种应用于自动泊车的障碍物识别方法的实施例,具体来说,如图1所示,可以包括如下步骤:
步骤S1、实时获取由四个鱼眼相机分别采集的图片,并采用畸变算法生成去畸变图片。
在实际操作中,这四张图片可以存储在一个数组中,供后续特征提取算法使用。并由于本发明集合了机器学习算法的训练、测试,因此图像的来源可以是利用鱼眼摄像头采集既定的五种类型的障碍物图片并将其保存,这里的障碍物类型可以分别设为:人、限位牌、限位球、限位杆、限位锁,本领域技术人员可以理解的是,这些类型的设定是对应自动泊车场景中常见的障碍物而设计的。
步骤S2(可选)、将去畸变图片融合为输入图像。
更为具体地,优选可以将采集的四张图像融合为输入图像,当然,也可以考虑不融合四张图像,而是将四张图像分别作为独立的输入图像。
步骤S3、提取所述输入图像的多维图像特征,所述多维图像特征包括:灰度特征、颜色特征、梯度幅度特征以及梯度方向直方图特征。
具体来说,聚合通道特征可以集成各种能够从不同的角度描述目标外观共性的特征,这里给出示意,即可以包含灰度特征、颜色特征、梯度幅度特征、梯度方向直方图。在实际操作中,则可以提取1个标准化的梯度幅值通道特征、3个LUV颜色通道特征6个方向的梯度直方图通道特征。
而提取多维图像特征的方式,这里给出一个并非限定的示例参考:可以利用预设的特征提取函数对所述输入图像进行处理并保存为新图像,再利用所述新图像构建高斯金字塔,最后利用向下采样机制从所述高斯金字塔中获得多维图像特征。
为便于理解,举例如下:
(1)灰度特征,可以调用opencv开源灰度特征提取函数获取,提取完之后并保存为新的图片;构建灰度特征的高斯金字塔:优选构建五层高斯金字塔,最底层是保存后的新图(可记为Level 0),倒数第二层是底层图像大小的1/4(可记为Level 1),倒数第三层是倒数第二层的1/4(可记为Level 2),倒数第四层是倒数第三层的1/4(可记为Level 3),倒数第五层是倒数第四层的1/4(可记为Level 4)。接着,使用向下采样方法(缩小)来获得图像的灰度特征。具体实施时可以分为两步:第一步、将图片与高斯内核做卷积;第二步、将所有偶数行和列去除;最后,可以将获得的灰度特征进行向量化并放入预设的向量列表中。
(2)颜色特征,可将图像按照LUV三通道形式获取对应的特征,具体方法可参考上述。
(3)梯度幅度特征,具体方法可参考上述。
(4)梯度方向直方图特征,可以按照x轴方向和y轴方向获得对应的图像梯度直方图特征图并将其保存为图片,具体方法可参考上述。
步骤S4、将所述多维图像特征输入至基于预设的障碍物类型预先构建出的分类器组中。
这里所述分类器组中对应有前述各所述障碍物类型的独立分类器,也即是用于识别障碍物是否为人的第一独立分类器、用于识别障碍物是否为限位牌的第二独立分类器、用于识别障碍物是否为限位球的第三独立分类器、用于识别障碍物是否为限位杆的第四独立分类器、用于识别障碍物是否为限位锁的第五独立分类器。进一步地,独立分类器优选采用Adaboost分类器。
在上述实施例的至少一种可能的实现方式中,前述独立分类器的训练及测试方式可以综合按如下示例考虑:首先,预先对图像样本的特征向量进行标注(数据样本可以参考前文预先由鱼眼相机采集,并且可以划分其中的80%用于进行训练,20%用于进行测试),即标出哪些是人,哪些是限位牌,哪些是限位球,哪些四限位杆,哪些是限位锁;其次,将标注后的图像样本基于不同的所述障碍物类型,分别输入至对应的Adaboost分类器中进行分类训练,也即是比对输入及实际的差异来调整分类器的参数。接着,测试时可以使用预设的混淆矩阵作为评判训练效果的依据,并计算出对应的精确率和召回率,若精确率和召回率低于预设的限定值,则持续优化Adaboost分类器的权重参数,直至精确率和召回率大于所述限定值。
这里给出一种混淆矩阵的参考示例,参见如下:
其中,
TP(True Positive):将正类预测为正类数,真实为0,预测也为0;
FN(False Negative):将正类预测为负类数,真实为0,预测为1;
FP(False Positive):将负类预测为正类数,真实为1,预测为0;
TN(True Negative):将负类预测为负类数真实为1,预测也为1;
精确率=TP/(TP+FP),召回率=TP/(TP+FN)。
步骤S5、由所述分类器组中对应的独立分类器依次结合所述多维图像特征,识别出是否为对应的障碍物。
最后需说明的是,步骤S5提及的依次,是指将输入图像的多维特征经由分类器组中的各个独立分类器逐个进行识别检测,当前的独立分类器识别出则输出对应的障碍物类型,没识别出则送至另一个独立分类器继续处理;即,“依次”并不是限定不同的独立分类器谁先谁后。
综上所述,本发明的构思在于,从鱼眼相机拍摄的图片中提取多维度的图像特征,并结合机器学习机制中的分类算法识别出既定的若干种障碍物类型。本发明有效规避了现有方案对于障碍物检测的识别率较低的问题,并且在一定程度上扩宽了自动泊车的应用场景,改善了自动泊车的功能体验。
本发明实施例中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示单独存在A、同时存在A和B、单独存在B的情况。其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项”及其类似表达,是指的这些项中的任意组合,包括单项或复数项的任意组合。例如,a,b和c中的至少一项可以表示:a,b,c,a和b,a和c,b和c或a和b和c,其中a,b,c可以是单个,也可以是多个。
以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
- 应用于自动泊车的障碍物识别方法
- 一种汽车及应用于该汽车的自动泊车系统、自动泊车方法