太阳能支架、支架控制系统及支架控制方法
文献发布时间:2023-06-19 13:26:15
技术领域
本申请涉及太阳能支架的领域,尤其是涉及太阳能支架、支架控制系统及支架控制方法。
背景技术
太阳能电池是一种将太阳的光能转化为电能的电子元件。通常人们将若干片太阳能电池封装在一起做成平板状的太阳能板,将多个太阳能板以串、并联的方式组合后,与逆变器一起构成了太阳能电站。根据余弦定理,太阳能组件与太阳之间的角度决定了太阳能电站的转化效率。当阳光直射在太阳能电池上时,太阳能电池的光电转化效率最高。但是,在一天中随着地球的转动太阳光的直射角度不断的变化,使得太阳能电池吸收的太阳光能也不断变化。
现有的能转动的太阳能支架多为单个太阳能板的太阳能支架,或者能够装配大规模的太阳能板却难以实现各个部位同步转动,无法满足大规模的太阳能板的装配需要。
发明内容
为了便于满足大规模的太阳能板获取太阳能的需求,第一方面,本申请提供了太阳能支架。
一种太阳能支架,包括:
安装杆,设置有若干根,若干根所述安装杆间隔分布;
转动组件,设置有若干个,所述转动组件的数量与所述安装杆的数量相对应,所述转动组件连接于相对应的安装杆的同一端,所述转动组件包括一能够转动的转动部,所述转动部的转动轴线方向与所述安装杆的设置方向相垂直;
推杆,与若干所述转动组件的转动部均固定连接且跟随所述转动部转动,用于与若干太阳能板相固定连接;
倾角传感器,设置有若干个,用于检测推杆沿其长度方向的不同部位转动的角度并发出角度检测信号;以及,
控制器,与所述倾角传感器及所述转动组件相通信,接收外部指令及角度检测信号,并基于接收的所述角度检测信号及外部指令发出控制信号至转动组件;
其中,所述转动组件接收控制器发出的所述控制信号后控制转动部同步转动,带动所述推杆转动。
通过采用上述技术方案,将若干块太阳能板固定连接于推杆的上端,控制器根据外部指令及每一倾角传感器输出的角度检测信号,控制若干转动组件的转动部同步转动,进而带动推杆转动,推杆转动时带动太阳能板转动,从而便于太阳能更好地吸收太阳能。
可选的,所述转动组件包括:
轴承,外圈固定连接于相对应的安装杆的同一端;所述转动部为轴承的内圈,所述推杆穿设且固定连接于轴承的内圈;
安装板,与所述推杆相固定连接;每一所述安装杆的两侧分别设置有一块所述安装板;所述倾角传感器设置于同一组的其中一块所述安装板的侧壁;
转动杆,连接于相邻两安装板之间;
铰接座,固定连接于安装杆的侧壁,所述铰接座与转动杆位于所述安装杆的同一侧;以及,
电推缸,一端铰接于所述铰接座,另一端铰接于所述转动杆;所述电推缸与所述控制器相通信且接收所述控制信号。
通过采用上述技术方案,当需要控制推杆转动一定的角度时,控制器控制电推缸的输出轴伸长或者收缩,控制器根据倾角传感器发送的角度检测信号判断每一电推缸输出轴是否伸长或者收缩相同的距离,从而控制推杆每一部位转动的角度相同,将太阳能板与推杆连接时,能够提高位于不同安装杆处的太阳能板受到的光照强度相同的可能性。
可选的,所述转动组件为蜗轮蜗杆减速机,所述转动部为所述蜗轮蜗杆减速机的轴承的内圈,所述蜗轮蜗杆减速机的电机与所述控制器相通信且接收所述控制信号,若干所述倾角传感器连接于所述推杆的侧壁且设置于相对应的安装杆旁。
通过采用上述技术方案,通过蜗轮蜗杆减速机带动推杆转动,推杆转动时带动太阳能板转动。
可选的,所述控制器的数量与所述倾角传感器的数量相对应,所述控制器与其相对应的倾角传感器相通信且与相对应的蜗轮蜗杆减速机相通信;其中一所述控制器配置为主控制器,其余所述控制器配置为副控制器;所述主控制器接收外部指令及角度检测信号,发出所述控制信号,并将所述控制信号同步至全部的副控制器;所述控制器通过PWM信号调节相应的电机的转速及转向。
通过采用上述技术方案,通过一个主控制器控制其余的副控制器,电机之间线较短,PWM驱动的稳定性和抗干扰能力好。
可选的,所述控制器设置有一个,每一所述蜗轮蜗杆减速机的电机均连接有霍尔传感器;所述霍尔传感器用于检测所述电机的霍尔周期与脉冲数并发出表征霍尔周期与脉冲数的霍尔检测信号;所述控制器与全部的霍尔传感器及全部的倾角传感器相通信;所述控制器基于外部指令、霍尔检测信号及角度检测信号控制全部的蜗轮蜗杆减速机的电机同步工作。
通过采用上述技术方案,多个电机通过一个控制器控制,测量的信号都在一个控制器内,信号一致性好,控制速度快,精度好。
基于上述太阳能支架,第二方面,本申请提供了一种支架控制系统,包括:
上述的太阳能支架;以及,
太阳能追光装置,用于采集太阳信息,将采集的太阳信息发送至所述控制器;所述太阳信息包括方位角、高度角及光照强度。
第三方面,本申请提供了一种支架控制方法,包括:
步骤S101、间隔获取所述太阳信息,所述太阳信息包括方位角、高度角及光照强度;
步骤S102、判断下一刻获取的光照强度是否大于上一刻获取的光照强度;如果是,进入步骤S103;
步骤S103、判断下一刻获取的光照强度与上一刻获取的光照强度的差值是否大于预设值;如果大于,则进入步骤S104;如果不大于,进入步骤S106;
步骤S104、获取角度检测信号;
步骤S105、依据角度检测信号及下一刻获取的太阳信息发送控制信号至转动组件;
步骤S106、获取角度检测信号;
步骤S107、依据角度检测信号及上一刻获取的太阳信息发送控制信号至转动组件;
其中,所述转动组件接收所述控制信号后控制转动部转动,带动所述推杆转动。
通过采用上述技术方案,减少了转动组件在光照强度波动时来回移动的可能性,节省了能源,提高了装置的使用寿命。
可选的,所述控制方法还可以是:
步骤S201、间隔获取所述太阳信息,所述太阳信息包括方位角、高度角及光照强度;
步骤S202、判断下一刻获取的光照强度是否大于上一刻获取的光照强度;如果是,进入步骤S203;
步骤S203、判断下一刻获取的光照强度与上一刻获取的光照强度的差值是否大于预设值;如果大于,则进入步骤S204;如果不大于,进入步骤S206;
步骤S204、获取角度检测信号及霍尔检测信号;
步骤S205、依据角度检测信号及下一刻获取的太阳信息发送控制信号至转动组件;
步骤S206、获取角度检测信号及霍尔检测信号;
步骤S207、依据角度检测信号、霍尔检测信号及上一刻获取的太阳信息发送控制信号至电机。
第四方面,本申请提供了一种计算机可读存储介质,存储有能够被处理器加载并执行上述支架控制方法的计算机程序。
附图说明
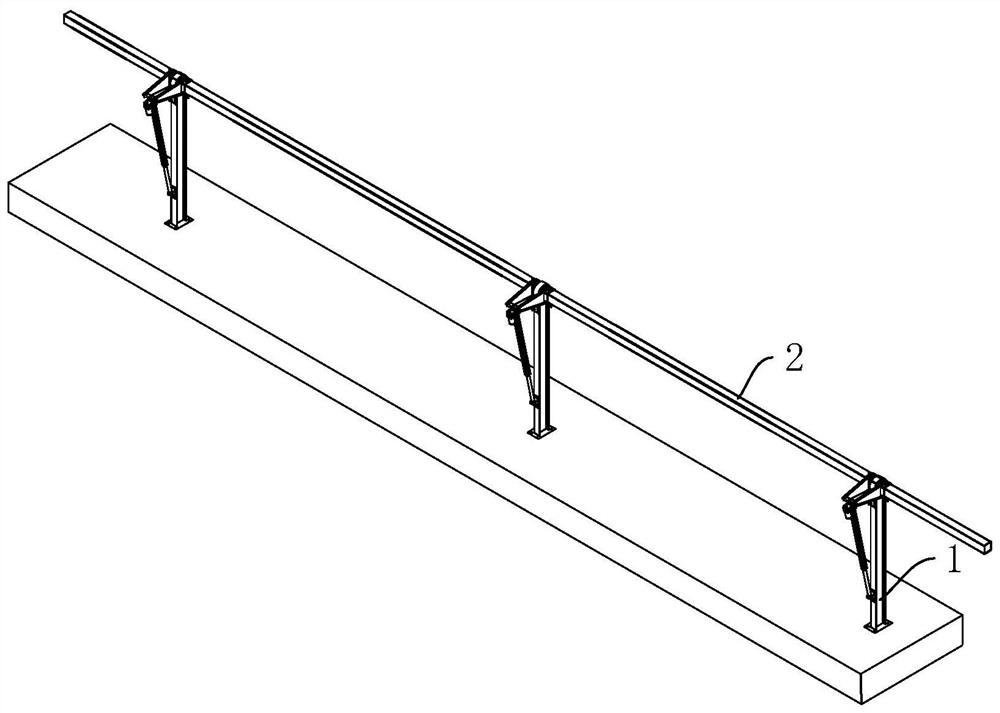
图1是本申请的一种太阳能支架其中一种实施方式的结构示意图。
图2是本申请的一种太阳能支架安装太阳能板后的结构示意图。
图3是本申请的转动组件的其中一种实施方式的结构示意图。
图4是本申请的转动组件的另一种实施方式的结构示意图。
图5本申请的一种支架控制方法的其中一个实施方式的流程图。
图6本申请的一种支架控制方法的另一个实施方式的流程图。
附图标记说明:1、安装杆;2、推杆;3、轴承;4、安装板;5、转动杆;6、铰接座;7、电推缸;8、蜗轮蜗杆减速机;9、太阳能板;10、电机。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图1-6及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
本申请实施例公开一种太阳能支架。
参照图1和图2,作为太阳能支架的一种实施方式,太阳能支架包括安装杆1、转动组件、推杆2、倾角传感器及控制器。具体的,安装杆1设置有若干根,若干根安装杆1沿同一直线设置,若干根安装杆1间隔分布,在本申请中,若干根安装杆1等距间隔分布;在实际安装使用时,安装杆1的底部与安装面如地面相固定连接。转动组件设置有若干个,转动组件的数量与安装杆1的数量相对应,转动组件固定连接于相对应的安装杆1的同一端,在太阳能支架使用时,每一安装杆1的顶部均固定连接有一个转动组件,转动组件包括一能够转动的转动部,转动部的转动轴线方向与安装杆1的设置方向相垂直。推杆2用于与若干太阳能板相固定连接,推杆2与若干转动组件的转动部均固定连接且跟随转动部转动。
倾角传感器用于检测推杆2沿其长度方向的不同部位转动的角度并发出角度检测信号。控制器与倾角传感器及转动组件相通信,控制器接收外部指令及角度检测信号,并基于接收的角度检测信号及外部指令发出控制信号至转动组件。转动组件接收控制器发出的控制信号后控制转动部同步转动,带动推杆2转动。
参照图2,下面结合具体应用场景进行阐述。利用本申请中的太阳能支架与太阳能板9连接,用于获取太阳能时,先将若干太阳能板9的背部与推杆2的上表面相固定连接,此时外部指令可以是太阳信息,太阳信息包括方位角、高度角及光照强度;控制器根据外部指令及每一倾角传感器输出的角度检测信号,控制若干转动组件的转动部同步转动,进而带动推杆2转动,推杆2转动时带动太阳能板9转动,从而便于太阳能板9更好地吸收太阳能。
参照图3,作为转动组件的其中一种实施方式,转动组件包括:轴承3、安装板4、转动杆5、铰接座6以及电推缸7。其中,轴承3的外圈固定连接于相对应的安装杆1的同一端;即在太阳能支架使用时,轴承3的外圈固定连接于相对应的安装杆1的上端,固定的方式可以是通过螺栓固定。转动部为轴承3的内圈,推杆2穿设轴承3的内圈且推杆2固定连接于轴承3的内圈,轴承3的内圈转动时带动推杆2转动。
继续参照图3,安装板4与推杆2相固定连接,固定连接的方式可以是焊接,可以是通过耳板贴合推杆2后利用螺栓进行固定连接;每一安装杆1的两侧分别设置有一块安装板4,即安装杆1位于相邻两安装板4之间。倾角传感器固定连接于同一组的其中一块安装板4的侧壁。转动杆5设置于相邻两块安装板4之间,转动杆5的一端固定连接于其中一块安装板4,转动杆5的另一端固定连接于另一块安装板4。铰接座6固定连接于安装杆1的侧壁,固定连接的方式可以是螺栓固定,铰接座6与转动杆5位于安装杆1的同一侧。电推缸7一端铰接于铰接座6,另一端铰接于转动杆5,若干电推缸7与同一控制器相通信且接收控制信号。
在本申请中,当需要控制推杆2转动一定的角度时,控制器控制电推缸7的输出轴伸长或者收缩,控制器根据倾角传感器发送的角度检测信号判断每一电推缸7输出轴是否伸长或者收缩相同的距离,从而控制推杆2每一部位转动的角度相同,减少推杆2不同部位由于转动的角度不同导致推杆2受到不同方向的力造成损坏的可能性。将太阳能板9与推杆2连接时,提高了位于不同的安装杆1处的太阳能板9受到的光照强度相同的可能性,从而便于更好地利用太阳能。
参照图4,作为转动组件的另一种实施方式,转动组件为蜗轮蜗杆减速机8,转动部为电推缸蜗轮蜗杆减速机8的轴承的内圈,蜗轮蜗杆减速机8与安装杆2相固定连接,蜗轮蜗杆减速机8的电机10与控制器相通信且接收控制信号,若干倾角传感器连接于推杆2的侧壁且设置于相对应的安装杆1旁。在申请中,控制器与其相对应的倾角传感器相通信且与相对应的蜗轮蜗杆减速机8相通信;其中一控制器配置为主控制器,其余控制器配置为副控制器;主控制器接收外部指令及角度检测信号发出控制信号,并将控制信号同步至全部的副控制器;控制器通过PWM信号调节相应的电机10的转速及转向。
在本申请中,当需要控制推杆2转动一定的角度时,控制器控制电机10转动,控制器根据相对应的倾角传感器发送的角度检测信号判断每一电机10转动的角度,从而控制推杆2每一部位转动的角度相同。将太阳能板9与推杆2连接时,能够提高位于不同安装杆1处的太阳能板9受到的光照强度相同的可能性。
在太阳能支架的另一实施例中,控制器设置有一个,倾角传感器设置有一个,倾角传感器固定连接于推杆2的侧壁;每一蜗轮蜗杆减速机8的电机10均连接有霍尔传感器;霍尔传感器用于检测电机10的霍尔周期与脉冲数并发出表征霍尔周期与脉冲数的霍尔检测信号;控制器与全部的霍尔传感器及倾角传感器相通信,控制器基于外部指令、霍尔检测信号及角度检测信号控制全部的蜗轮蜗杆减速机8的电机10同步工作。
在本申请中,霍尔传感器可输出2路增量型A,B信号输出,电机10每转一圈,A和B信号都输出2个周期方波型号,A,B信号相位差90度,通过测量A,B信号周期可以计算出电机10运行速度,通过检测相位可以确定电机10方向。当需要控制推杆2转动时,控制器同时驱动全部的电机10,同时检测电机10的霍尔信号周期和脉冲数,通过调整PWM信号调节各个电机10的速度及转向,实现各电机10速度同步,脉冲计数可以计算出各电机10转过的位置差,也可以通过调节速度来补偿位置误差,最终实现电机10速度和位置都同步。
基于上述的太阳能支架,本申请还提供了一种支架控制系统,包括上述的太阳能支架以及太阳能追光装置。太阳能追光装置用于采集太阳信息,太阳信息包括方位角、高度角及光照强度将采集的太阳信息发送至控制器。
参照图5,基于上述的太阳能支架或者支架控制系统,本申请还提供一种支架控制方法,包括以下步骤:
步骤S101、间隔获取太阳信息,太阳信息包括方位角、高度角及光照强度。
步骤S102、判断下一刻获取的光照强度是否大于上一刻获取的光照强度;如果是,进入步骤S103。
步骤S103、判断下一刻获取的光照强度与上一刻获取的光照强度的差值是否大于预设值;如果大于,则进入步骤S104;如果不大于,进入步骤S106。
步骤S104、获取角度检测信号。
步骤S105、依据角度检测信号及下一刻获取的太阳信息发送控制信号至转动组件。
步骤S106、获取角度检测信号。
步骤S107、依据角度检测信号及上一刻获取的太阳信息发送控制信号至转动组件。
在本申请中,由于太阳光照强度容易发生变化,检测到的光照强度是一个变化值;通过判断下一刻获取的光照强度是否大于上一刻获取的光照强度,再判断下一刻获取的光照强度与上一刻获取的光照强度的差值是否大于预设值,当下一刻获取的光照强度大于上一刻获取的光照强度且差值大于预设值时,发送控制信号至转动组件,控制组件控制推杆2转动,此时转动组件依据下一刻获取的高度角及方位角进行转动。同样的,当下一刻获取的光照强度小于上一刻获取的光照强度且差值大于预设值时,发送控制信号至转动组件,控制组件控制推杆2转动,此时转动组件依据上一刻获取的高度角及方位角进行转动。当从而减少了转动组件在光照强度波动时来回移动的可能性,节省了能源,提高了装置的使用寿命。
参照图6,作为一种支架控制方法的另一种实施方式,一种支架控制方法,包括以下步骤:
步骤S201、间隔获取太阳信息,太阳信息包括方位角、高度角及光照强度;
步骤S202、判断下一刻获取的光照强度是否大于上一刻获取的光照强度;如果是,进入步骤S203;
步骤S203、判断下一刻获取的光照强度与上一刻获取的光照强度的差值是否大于预设值;如果大于,则进入步骤S204;如果不大于,进入步骤S206;
步骤S204、获取角度检测信号及霍尔检测信号;
步骤S205、依据角度检测信号及下一刻获取的太阳信息发送控制信号至转动组件;
步骤S206、获取角度检测信号及霍尔检测信号;
步骤S207、依据角度检测信号、霍尔检测信号及上一刻获取的太阳信息发送控制信号至电机10。
本申请实施例还公开计算机可读存储介质。
具体来说,该计算机可读存储介质,其存储有能够被处理器加载并执行如上述方法的计算机程序,该计算机可读存储介质例如包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,本说明书包括摘要和附图中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
- 太阳能支架、支架控制系统及支架控制方法
- 多液压支架的控制方法、装置及多液压支架控制系统