编队无人机灯光模块自检测系统及方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及无人机灯光表演的技术领域,具体涉及编队无人机灯光模块自检测系统及方法。
背景技术
主流的编队无人机表演都是以灯光为基础,多台无人机在空中组成灯光图案来呈现,就好像天空中的一块彩色屏幕。既然编队无人机表演像一块彩色屏幕,那也就有可能会出现屏幕那样的问题:“坏点”或者“色偏”。出现了上述问题后,对编队无人机的灯光表演就会有一定感官上的影响。
目前编队无人机对于灯光模块的检测,都是人为手动进行并在地面指挥台实时给出灯光指令,编队无人机开启灯光模块,再由工作人员进行目视筛选。而当人为因素介入后,对于灯光颜色的定义就会有点参差,人为筛选时的主观决策容易出现偏差和误改。如果需要提高灯光颜色的准确度时,就需要用传感器来统一测量标准。而且,当编队无人机较为大量时,人为调整有时候会难以找到对应的出现偏差的无人机,从而耽误修改时间,不能在表演期间快速及时地对应调整。
发明内容
为了解决上述现有技术存在的问题,本发明目的之一在于提供编队无人机灯光模块自检测系统,该系统在无人机上增加颜色传感器实时检测灯光颜色,将常规的人力目视检测灯光颜色是否存在偏差,改进为通过颜色传感器采集数据并与设定值对比,进而便于编队无人机灯光表演时针对个别无人机的颜色偏差进行调整。本发明目的之二在于提供编队无人机灯光模块自检测方法,该方法利用颜色传感器输出对比结果后能快速进行调整,降低了人为主观因素造成的偏差,及时解决编队无人机灯光表演时出现错色、偏色等问题。
本发明所述的编队无人机灯光模块自检测系统,包括:
灯光模块,安装在各无人机上,用于根据设定值发出不同RGB强度值的灯光颜色;
颜色传感器,安装在各无人机上,用于接收所述灯光模块发出的光,并与设定值进行对比;
处理单元,安装在各无人机上,且分别与对应的所述灯光模块和所述颜色传感器信号连接,所述处理单元用于根据设定值及所述颜色传感器的反馈,控制所述灯光模块发出灯光颜色的RGB强度值;
地面站软件,分别与各所述处理单元无线连接,用于接收各所述处理单元的反馈信息,并向各所述处理单元发送指令。
在其中一个实施例中,所述灯光模块位于无人机的底部,且在所述灯光模块上罩设有半球状的灯光反射罩,所述颜色传感器设于所述灯光模块的中部并对应位于所述灯光反射罩的反射焦点处。
在其中一个实施例中,所述灯光模块包括均匀排列布置在无人机底部的多个灯珠。
在其中一个实施例中,所述灯光反射罩为半透明的乳白色灯罩。
编队无人机灯光模块自检测方法,应用于所述编队无人机灯光模块自检测系统中,并包括如下步骤:
S1、启动所述颜色传感器,所述灯光模块根据设定值发出灯光颜色;
S2、所述颜色传感器检测所述灯光模块投射出的光线的RGB值,并与设定值进行对比校验,得到对比值;
S3、若对比值符合偏差范围,则所述灯光模块允许根据下一设定值继续发出灯光颜色,并重复步骤S2,直至完成灯光变化的程序;若对比值不符合偏差范围,则立即输出当次的检测结果,并反馈至所述处理单元进行调整;
S4、所述颜色传感器完成检测后,输出数据及各检测结果至所述处理单元,再由所述处理单元反馈至所述地面站软件告知工作人员。
在其中一个实施例中,在所述步骤S3中,所述处理单元的调整方式为:所述处理单元根据设定值和对比值重新控制所述灯光模块发出灯光颜色,并重复步骤S2,直至对比值符合偏差范围。
在其中一个实施例中,在所述步骤S3中,所述处理单元的调整方式为:所述处理单元将当次的检测结果反馈至所述地面站软件告知工作人员,再由工作人员重新调整设定值。
在其中一个实施例中,在所述步骤S3中,所述偏差范围为最大强度值的±15%。
与现有技术相比,本发明技术方案的有益效果是:
1、本发明将常规的人力目视检测灯光颜色是否存在偏差,改进为通过颜色传感器采集数据并与标准值对比,输出对比结果后再进一步调整,降低了人为主观因素造成的偏差,及时解决编队无人机灯光表演时出现错色、偏色等问题。
2、颜色传感器是将物体颜色同设定的参考颜色进行比较来检测颜色的传感器,当两个颜色在一定的误差范围内相吻合时,输出检测结果,本发明中主要运用集成光-频率转换器,即将光强度直接转换为频率分别与每个红、绿、蓝通道的红、绿、蓝光分量的强度成正比的一个脉冲序列。
3、通过安装在灯光模块中颜色传感器检测投射到灯光反射罩上的灯光颜色,与设定的参考值进行对比,并将检测结果反馈到处理单元即无人机自带的飞控处理器上,从地面站软件的操作界面上反馈给工作人员,让工作人员进行替换或者修正工作,减少人为筛选时的主观决策,同时由于只是对应的处理单元会即时发送信号,能让工作人员快速找到出现颜色偏差的无人机。
4、本方法还可以通过处理单元进行自身地调整,可更及时调整表演时无人机出现色偏等情况,由于在较多情况下,灯光模块根据设定值发出的灯光颜色产生偏差,通常是由于灯珠自身的差别,或者连接线路等问题,那么处理单元就可以设置为根据颜色传感器反馈的对比值以及原设定值来调整。
附图说明
图1是本发明编队无人机灯光模块自检测系统的结构示意图;
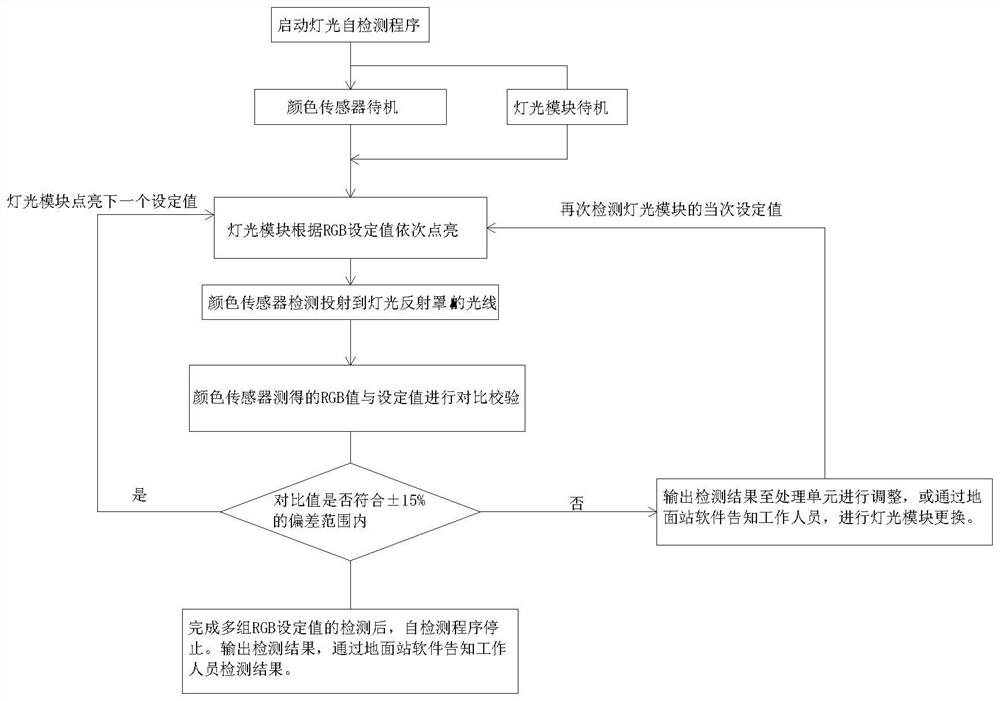
图2是本发明编队无人机灯光模块自检测方法的流程图。
附图标记说明:1-无人机,2-灯光模块,3-颜色传感器,4-处理单元,5-地面站软件,6-灯光反射罩。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以是通过中间媒介间接连接,可以说两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明的具体含义。下面结合附图和实施例对本发明的技术方案做进一步的说明。
如图1和图2所示,本发明的编队无人机灯光模块自检测系统,包括:
灯光模块2,安装在各无人机1上,用于根据设定值发出不同RGB强度值的灯光颜色;
颜色传感器3,安装在各无人机1上,用于接收所述灯光模块2发出的光,并与设定值进行对比;
处理单元4,安装在各无人机1上,且分别与对应的所述灯光模块2和所述颜色传感器3信号连接,所述处理单元4用于根据设定值及所述颜色传感器3的反馈,控制所述灯光模块2发出灯光颜色的RGB强度值;
地面站软件5,分别与各所述处理单元4无线连接,用于接收各所述处理单元4的反馈信息,并向各所述处理单元4发送指令。
本系统在无人机1上增加颜色传感器3实时检测灯光颜色,将常规的人力目视检测灯光颜色是否存在偏差,改进为通过颜色传感器3采集数据并与设定值对比,进而便于编队无人机灯光表演时针对个别无人机1的颜色偏差进行调整。颜色传感器3是将物体颜色同设定的参考颜色进行比较来检测颜色的传感器,当两个颜色在一定的误差范围内相吻合时,输出检测结果,本系统中主要运用集成光-频率转换器,即将光强度直接转换为频率分别与每个红、绿、蓝通道的红、绿、蓝光分量的强度成正比的一个脉冲序列。
进一步地,灯光模块2位于无人机1的底部,且在所述灯光模块2上罩设有半球状的灯光反射罩6,所述颜色传感器3设于所述灯光模块2的中部并对应位于所述灯光反射罩6的反射焦点处。灯光模块2可根据实际需要,设置在无人机1上,例如在无人机1的底部,这样即可罩设一个灯光反射罩6,从而使灯光模块2发出的灯光颜色充满灯光反射罩6而透射出来,因此对于一些特殊的颜色变化,就可以通过控制不同的灯珠来表现。而无论对应的灯珠如何变化,在灯光反射罩6使其漫反射的情况下,始终会集中至大概在灯光反射罩6圆心处的焦点位置,而颜色传感器3安装在此,即可接收光线,并对比检验其颜色,从而得到检测结果。此外,灯光模块包括均匀排列布置在无人机底部的多个灯珠,进而方便控制和形成均匀的光线颜色。灯光反射罩6为半透明的乳白色灯罩,使灯光充满灯光反射罩6内部,除了能部分反射到颜色传感器3进行采集对比外,还能透出灯光反射罩,表现出对应颜色,尤其是在无人机1上,在地面的观众与无人机1有一定距离,就会看到发光的整个灯光反射罩6,更为美观。
编队无人机灯光模块自检测方法,应用于上述编队无人机灯光模块自检测系统中,并包括如下步骤:
S1、启动所述颜色传感器3,所述灯光模块2根据设定值发出灯光颜色;
S2、所述颜色传感器3检测所述灯光模块2投射出的光线的RGB值,并与设定值进行对比校验,得到对比值;
S3、若对比值符合偏差范围,则所述灯光模块2允许根据下一设定值继续发出灯光颜色,并重复步骤S2,直至完成灯光变化的程序;若对比值不符合偏差范围,则立即输出当次的检测结果,并反馈至所述处理单元4进行调整;
S4、所述颜色传感器3完成检测后,输出数据及各检测结果至所述处理单元4,再由所述处理单元4反馈至所述地面站软件5告知工作人员。
本方法利用颜色传感器3输出对比结果后能快速进行调整,降低了人为主观因素造成的偏差,及时解决编队无人机灯光表演时出现错色、偏色等问题。通过安装在灯光模块4中颜色传感器3检测投射到灯光反射罩6上的灯光颜色,与设定的参考值进行对比,并将检测结果反馈到处理单元4即无人机1自带的飞控处理器上,所述处理单元4将当次的检测结果反馈至所述地面站软件5告知工作人员,再由工作人员重新调整设定值,从地面站软件5的操作界面上反馈给工作人员,让工作人员进行替换或者修正工作,减少人为筛选时的主观决策,同时由于只是对应的处理单元4会即时发送信号,能让工作人员快速找到出现颜色偏差的无人机1。
另外,在所述步骤S3中,所述处理单元4的调整方式也可以这样设置:所述处理单元4根据设定值和对比值重新控制所述灯光模块2发出灯光颜色,并重复步骤S2,直至对比值符合偏差范围。通过处理单元4进行自身地调整,由于在较多情况下,灯光模块2根据设定值发出的灯光颜色产生偏差,通常是由于灯珠自身的差别,或者连接线路等问题,那么处理单元4就可以设置为根据颜色传感器3的反馈来调整,例如设定值是RGB强度为(40,40,200)的灯光,偏差范围为最大强度值的±15%,而颜色传感器3检测到的RGB强度为(40,50,210),则未超出偏差范围;若检测到的RGB强度为(60,80,240),则明显超出偏差范围,对比值为它们的差值,即(20,40,40),可反馈至处理单元4中,结合设定值进行调整,例如让灯光模块2发出RGB强度为(20,0,160)的灯光,那么加上测出的对比值,就可接近原设定值的(40,40,200)的灯光,因此完成无人机自身的颜色偏差调整,并把该次修改等数据传输给地面站软件5告知工作人员。
在本申请的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。
图中,描述位置关系仅用于示例性说明,不能理解为对本专利的限制;显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。