串行总线系统的用户站和在串行总线系统中通信的方法
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及一种用于串行总线系统的用户站和一种用于在串行总线系统中进行通信的方法,所述串行总线系统以高的数据速率以及大的灵活性和大的错误稳健性(Fehlerrobusheit)工作。
背景技术
视技术设施或车辆的功能数目而定,(例如在车辆中的)用于在传感器与控制设备之间进行通信的总线系统应使得能够传输大的数据量。在此常常要求,要比到目前为止更快地将数据从发送方传输至接收方,而且在需要时也可传输大数据包。
在车辆中,总线系统现在处于引进阶段,在所述引进阶段中,数据作为在作为带有CANFD的CAN协议规范的标准ISO11898-1∶2015中的消息被传输。在总线系统的总线用户、如传感器、控制设备、发生器等之间,传输这些消息。对此,消息以帧被发送到总线上,在所述帧中,在两个通信阶段之间进行转换。在第一通信阶段(仲裁(Arbitration))中协商,总线系统的用户站中的哪个用户站允许在随后的第二通信阶段(数据阶段或发送有用数据)将它的帧发送到总线上。CAN FD由大多数制造商在第一步以500kbit/s的仲裁位速率和2Mbit/s的数据位速率被用在车辆中。因此,在总线上传输时,在慢速运行方式与快速运行方式之间来回切换。
为了在第二通信阶段中能够实现还更大的数据速率,现在开发针对CAN FD的后继总线系统,该针对CAN FD的后继总线系统称为CAN XL,并且现在在自动化中的CAN(CiA,CANin Automation)组织处被标准化。除经由CAN总线的纯数据传送之外,CAN XL也应该支持另外的功能,如功能安全(Safety(安全))、数据安全(Security(安全性))和服务质量(QoS=Quality of Service)。这些都是在自主行驶的车辆中所需的基本特性。
在经由通道(CAN总线)以帧传输数据时,可能会发生错误。尤其是,由于外部影响、尤其是照射,位可能被篡改。CAN XL的通信协议必须识别出错误并对其作出反应。
在CAN XL中,错误可以或者带有错误信令(Fehler-Signalisierung)地或者没有错误信令地被处理。对于错误信令,探测到错误的用户站将错误帧(错误标志(ErrorFlag))发送到总线上,以便通知其他用户站已识别出错误。在没有错误信令的情况下,探测到错误的用户站没有将错误帧(错误标志)发送到总线上。因此,进行发送的用户站(发送节点)没有从仅进行接收的用户站(接收节点)得到任何反馈,所述仅进行接收的用户站可能会不正确地接收所述帧。也把这种方式的通信称之为“Fire andforget”,这也可以被称为发送后遗忘。
如果没有错误帧被发送到总线上,则进行发送的用户站(发送节点)将完整的帧发送到总线上,因为未发生关于错误的反馈。如果可能会不正确地接收该帧的进行接收的用户站(接收节点)的发送/接收装置(收发器(Transceiver))没有事先已处于慢速运行方式,则进行接收的用户站(接收节点)将该发送/接收装置从快速运行方式(FAST)切换回到慢速运行方式(SLOW),并且此后尝试,重新融入总线上的正在进行中的通信。因此,这些用户站连续等待由11个隐性位构成的序列,即所谓的总线空闲序列(Bus-Idle-Sequenz),所述总线空闲序列可能只在帧的末端出现。如下用户站也等待这个序列:所述用户站被重新接通,或者在不活动切换之后又被切换为活动的,而且后来想要参与总线中的通信。
在此重要的是,所有融入到通信中的用户站在帧的末端似乎同时结束对11个隐性位的识别。这种同步性是必要的,因为所有用户站必须在下一位(亦即跟着11个隐性位的位)中同时准备好,发送帧或者接收帧。
为了实现用户站的这种同步性,在CAN XL帧中的DAS字段中存在同步边沿,所有接收节点都应同步到该同步边沿上。此后,可以同步进行重新融入。
可是有问题的是,所有接收节点在数据阶段期间已看到了错误。在该情况下,没有任何接收节点发送显性ACK位作为针对该帧的正确接收的确认。经此,DAS字段中的同步边沿是在总线空闲序列之前针对同步的最后可能的边沿。在此已表明,利用当前CAN XL帧格式的DAS字段,不可能在所有情况下都进行正确同步。
发明内容
因而,本发明的任务是,提供一种用于串行总线系统的用户站和一种用于在串行总线系统中进行通信的方法,该用户站和该方法解决了前面提到的问题。尤其是要提供一种用于串行总线系统的用户站和一种用于在串行总线系统中进行通信的方法,其中在正在进行中的总线通信中,在出错误之后或者在接通之后可以始终正确地进行接收节点的重新融入,以便即使在高数据速率和提高每帧有用数据的量的情况下,也实现通信的大的错误稳健性。
通过一种具有权利要求1的特征的用于串行总线系统的用户站,解决了该任务。用户站具有通信控制装置,用于控制该用户站与总线系统的至少一个另外的用户站的通信,使得对于在总线系统的用户站之间交换的消息,在第一通信阶段发送到总线上的信号的位时间可以区别于在第二通信阶段发送的信号的位时间;并且该用户站具有用于将发送信号发送到总线系统的总线上的发送/接收装置;其中通信控制装置构建为,根据帧来产生发送信号,并在第二通信阶段之后将带有边沿的字段插入到该帧中,其中该字段在该边沿之前具有对应于如下持续时间的预先确定的长度:所述持续时间长于第一通信阶段的位时间的持续时间,而且其中针对总线系统的至少一个另外的用户站的通信控制装置,设置有该边沿,用于同步到在总线上的通信,所述至少一个另外的用户站的发送/接收装置在预先确定的持续时间之前被切换到用于在第一通信阶段中发送和接收帧的运行方式。
通过构建该用户站,存在经过改变的DAS字段,利用所述经过改变的DAS字段来确保:所有重新融入到总线上的通信的用户站能够在DAS字段中同步。即使在由于照射而出现错误的情况下,这也能够实现安全的错误处理。此外,确保公平,因为所有用户站(节点)都同时又发送就绪或接收就绪。再者,经此可以避免在总线系统中通信时的后续错误。
由此,利用该用户站,首先能够实现与CAN XL的稳健通信。
因此,利用该用户站,在总线系统中可能的是,在第一通信阶段中保持被CAN所已知的仲裁,并且尽管如此仍相对于CAN或者CAN FD再次相当大地提高传输速率。
如果在总线系统中也存在至少一个CAN用户站和/或至少一个CAN FD用户站,则也可以采用由用户站执行的方法,所述至少一个CAN用户站和所述至少一个CAN FD用户站按照CAN协议和/或CAN FD协议发送消息。
在从属权利要求中,说明了用户站的有利的其他构建方案。
可能的是,预先确定长度的字段具有带有第一通信阶段的位时间的至少三个位。
该边沿可以是下降沿。
通信控制装置可以构建为,在该字段中,将具有逻辑值11的位序列插入到该边沿之前。
通信控制装置可以构建为,将该字段作为具有逻辑值1101的位序列插入。
根据一个实施例,通信控制装置构建为,借助发送信号中的脉冲宽度调制,给发送/接收装置用信号通知:发送/接收装置必须转换它的运行方式。
可设想的是,用户站再者具有用于将发送信号发送到总线系统的总线上的发送/接收装置,其中该发送/接收装置构建为,在发送/接收装置在发送信号中尚未接收到任何边沿的预先确定的持续时间期满之后,将它的运行方式从第二通信阶段的运行方式转换到第一通信阶段的不同运行方式。
根据一个实施例,通信控制装置构建为,插入具有逻辑值0的PWM符号作为发送信号中在预先确定的持续时间开始之前的最后符号。
根据一个实施例,通信控制装置构建为,插入具有逻辑值1的PWM符号作为发送信号中在预先确定的持续时间开始之前的最后符号。
根据一个实施例,通信控制装置构建为,插入具有逻辑值0的PWM符号作为发送信号中在预先确定的持续时间开始之前的倒数第二个符号,并且将如下PWM符号作为发送信号中在预先确定的持续时间开始之前的最后符号插入到发送信号中:所述PWM符号具有逻辑值0,可是不具有结束边沿。
通信控制装置可以构建为,关于如下内容检查在发送/接收装置向通信控制装置发送接收信号的端子处的信号:发送/接收装置是否将它的运行方式从第二通信阶段的运行方式已转换到第一通信阶段的不同运行方式。
根据另一实施例,发送/接收装置构建为,以用于在第一通信阶段中发送和接收帧的运行方式,将整个帧发送到总线上。
可能的是,与CAN FD兼容地建立针对消息形成的帧,其中在第一通信阶段中协商,在随后的第二通信阶段中,总线系统的用户站中的哪个用户站得到对总线的至少暂时独占的、无冲突的访问。
前面所描述的用户站可能是如下总线系统的部分:该总线系统再者包括总线和至少两个用户站,所述至少两个用户站经由总线相互连接,使得所述至少两个用户站可以串行地相互通信。在这种情况下,所述至少两个用户站中的至少一个用户站是前面所描述的用户站。
再者,通过一种根据权利要求15所述的用于在串行总线系统中进行通信的方法,解决前面提到的任务。利用总线系统的用户站来实施该方法,所述用户站具有通信控制装置和发送/接收装置;其中所述方法具有步骤:利用通信控制装置来控制该用户站与总线系统的至少一个另外的用户站的通信,使得针对在总线系统的用户站之间交换的消息,在第一通信阶段发送到总线上的信号的位时间可以区别于在第二通信阶段发送的信号的位时间;并且利用发送/接收装置将发送信号发送到总线系统的总线上;其中通信控制装置根据帧来产生发送信号,并在第二通信阶段之后将带有边沿的字段插入到该帧中;而且其中该字段在该边沿之前具有对应于如下持续时间的预先确定的长度:所述持续时间长于第一通信阶段的位时间的持续时间;其中针对总线系统的至少一个另外的用户站的通信控制装置,设置有边沿,用于同步到在总线上的通信,所述至少一个另外的用户站的发送/接收装置在预先确定的持续时间之前被切换到用于在第一通信阶段中发送和接收帧的运行方式。
该方法提供了与前面关于用户站提到的优点相同的优点。
本发明的其他可能的实施方案也包括在前面或者在下文有关这些实施例所描述的特征或者实施形式的未明确提到的组合。在此,本领域技术人员也将添加单个方面作为对本发明的相应基本形式的改进或者补充。
附图说明
随后,参照附上的附图,并且依据实施例,更详细地描述了本发明。在附图中:
图1示出了根据第一实施例的总线系统的经过简化的方框电路图;
图2示出了用于阐明如下消息的结构的图表:所述消息可以由根据第一实施例的总线系统的用户站来发送;
图3示出了根据第一实施例的总线系统的用户站的经过简化的示意性方框电路图;
图4示出了在根据第一实施例的用户站中的总线信号CAN-XL H和CAN-XL L的时间变化过程;
图5示出了在根据第一实施例的用户站中的总线信号CAN-XL H和CAN-XL L的差分电压VDIFF的时间变化过程;
图6至图8分别示出了如下信号的时间变化过程:如果根据第一实施例的用户站是消息的发送方,则在该用户站的端子处发送帧时出现所述信号;
图9示出了总线信号CAN-XL H和CAN-XL L的差分电压VDIFF的由图6至图8的信号而产生的时间变化过程;
图10示出了在接收节点的接收端子处的如下状态的时间变化过程:所述状态由图9的差分电压VDIFF而产生;
图11至图13分别示出了如下信号的时间变化过程:如果根据第二实施例的用户站是消息的发送方,则在该用户站的端子处发送帧时出现所述信号;
图14示出了总线信号CAN-XL H和CAN-XL L的差分电压VDIFF的由图11至图13的信号而产生的时间变化过程;
图15示出了在接收节点的接收端子处的如下状态的时间变化过程:所述状态由图14的差分电压VDIFF而产生;
图16至图18分别示出了如下信号的时间变化过程:如果根据第三实施例的用户站是消息的发送方,则在该用户站的端子处发送帧时出现所述信号;
图19示出了总线信号CAN-XL H和CAN-XL L的差分电压VDIFF的由图16至图18的信号而产生的时间变化过程;以及
图20示出了在接收节点的接收端子处的如下状态的时间变化过程:所述状态由图19的差分电压VDIFF而产生。
在这些附图中,只要未另外说明,相同的或者功能相同的要素就配备有同一附图标记。
具体实施方式
作为实例,图1示出了总线系统1,该总线系统1尤其是基本针对CAN总线系统、CANFD总线系统、CAN XL总线系统和/或其改换方案来构建,如随后所描述的那样。总线系统1可以被使用在车辆、尤其是机动车、飞机等中或者被使用在医院等中。
在图1中,总线系统1具有多个用户站10、20、30,所述用户站10、20、30分别连接到总线40上,所述总线40具有第一总线缆芯41和第二总线缆芯42。总线缆芯41、42也可以称为CAN_H和CAN_L,或者也可以称为CAN-XL_H和CAN-XL_L,并且用于在针对发送状态中的信号耦合输入显性电平或产生隐性电平或者另外的电平之后进行电信号传输。经由总线40,消息45、46可以以信号的形式在各个用户站10、20、30之间串行传输。如果在总线40上的通信中出现错误,如在图1中通过锯齿状的黑色粗箭头(Blockpfeil)示出的那样,则可以可选地发送错误帧47(Error Flag)。用户站10、20、30例如是机动车的控制设备、传感器、显示设备等。
如在图1中所示的那样,用户站10具有通信控制装置11、发送/接收装置12和错误处理模块15。用户站20具有通信控制装置21、发送/接收装置22,并且可选地具有错误处理模块25。用户站30具有通信控制装置31、发送/接收装置32和错误处理模块35。用户站10、20、30的发送/接收装置12、22、32分别直接连接到总线40上,即使这在图1中未阐明也如此。
通信控制装置11、21、31分别用于控制相应的用户站10、20、30经由总线40与连接到总线40上的用户站10、20、30中的至少一个另外的用户站的通信。
通信控制装置11、31创建并读取第一消息45,所述第一消息45例如是经修改的CAN消息45。在这种情况下,经修改的CAN消息45基于CAN XL格式来建立,该CAN XL格式关于图2更详细地予以描述,并且在该CANXL格式的情况下采用相应的错误处理模块15、35。再者,可以实施通信控制装置11、31,以便视需求而定针对发送/接收装置32来提供CANXL消息45或者CAN FD消息46,或者从该发送/接收装置32接收CAN XL消息45或者CAN FD消息46。在这种情况下,也采用相应的错误处理模块15、35。通信控制装置11、31因此创建和读取第一消息45或者第二消息46,其中第一消息45和第二消息46通过它们的数据传输标准相区分,即在该情况下通过CAN XL或者CAN FD相区分。
通信控制装置21可以如按照ISO 11898-1∶2015的传统CAN控制器那样来实施,也就是说如容许CAN FD(CAN FD toleranter)的经典CAN控制器(Classical CAN-Controller)或者CAN FD控制器那样来实施。附加地,可选地存在错误处理模块25,该错误处理模块25具有与错误处理模块15、35相同的功能。通信控制装置21创建并读取第二消息46、例如CAN FD消息46。在CAN FD消息46的情况下,可以包括数目为0直至64的数据字节,所述数据字节还为此以与在经典CAN消息的情况下相比明显更快的数据速率被传输。尤其是,通信控制装置21如传统的CAN FD控制器那样来实施。
发送/接收装置22可以如按照ISO 11898-1:2015的传统CAN收发器那样或者如CANFD收发器那样来实施。可以实施发送/接收装置12、32,以便视需求而定针对所属的通信控制装置11、31来提供根据CAN XL格式的消息45或者根据现在的CAN FD格式的消息46,或者从所属的通信控制装置11、31接收根据CANXL格式的消息45或者根据现在的CANFD格式的消息46。
利用两个用户站10、30,可实现具有CANXL格式的消息45的形成和接着传输这些消息45,以及可实现接收这种消息45。
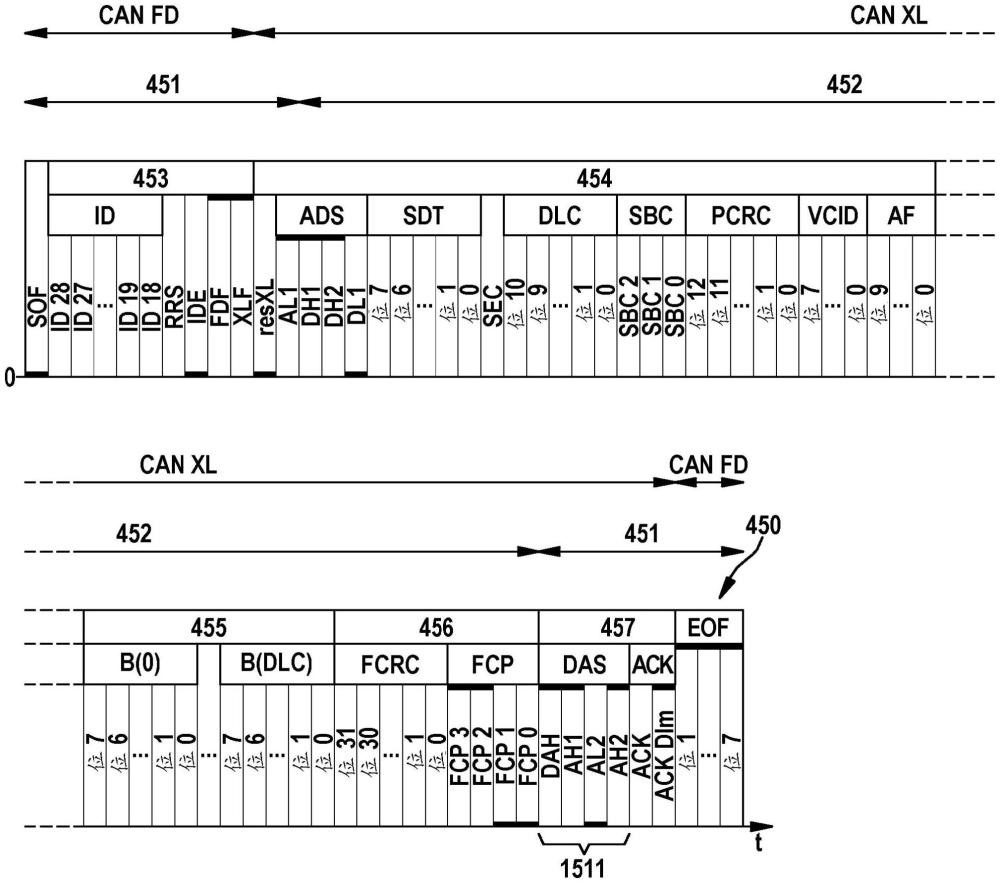
图2针对消息45示出了CAN XL帧450,如所述CAN XL帧450由通信控制装置11针对发送/接收装置12被提供用于发送到总线40上那样。在这种情况下,通信控制装置11在本实施例中将帧450创建为与CAN FD相兼容,如也在图2中阐明的那样。同一内容类似地适用于用户站30的通信控制装置31和发送/接收装置32。
根据图2,CAN XL帧450针对在总线40上的CAN通信划分成不同的通信阶段451、452,即划分成仲裁阶段451和数据阶段452。帧450具有:仲裁字段453,带有用于在通信阶段451、452之间转换的ADS字段的控制字段454,数据字段455,校验和字段456,以及帧结束字段457,在所述帧结束字段457中存在用于在通信阶段452、451之间转换的DAS字段。之后跟着帧末端字段EOF。
在仲裁阶段451中,借助在仲裁字段453中的具有例如位ID28至ID18的标识符(ID),逐位地在用户站10、20、30之间协商,哪个用户站10、20、30想要发送具有最高优先级的消息45、46,并且因而在接下来的时间中为了发送而在紧接着的数据阶段452中得到对总线系统1的总线40的独占访问。在仲裁阶段451中,如在CAN和CAN-FD中那样使用物理层(PhysicalLayer)。物理层对应于已知的OSI模型(OpenSystems Interconnection Modell(开放系统互连模型))的位传输层或者第1层。
在阶段451期间,重要的点是,使用已知的CSMA/CR方法,该CSMA/CR方法允许用户站10、20、30同时访问总线40,而无需破坏确定为较高优先级的消息45、46。经此,可以给总线系统1相对简单地添加其他总线用户站10、20、30,这是非常有利的。
CSMA/CR方法造成的后果是,在总线40上必须有所谓的隐性状态,所述隐性状态可以由另外的用户站10、20、30利用显性状态在总线40上被重新写入。在隐性状态下,高电阻状况在各个用户站10、20、30上占主导,这与总线布线的寄生物相组合造成的后果是更长的时间常数。这导致将如今的CAN FD物理层的最大位速率限制到在真实的车辆使用中的现在大约每秒2兆位。
在数据阶段452中,除控制字段454的部分之外,还发送CAN-XL帧或消息45的由数据字段455构成的有用数据,以及发送校验和字段456。之后跟着如下DAS字段:所述DAS字段用于从数据阶段452转换回到数据阶段451。
只有当用户站10作为发送方已赢得仲裁并且用户站10作为发送方由此为了发送而具有对总线系统1的总线40的独占访问时,消息45的发送方才开始将数据阶段452的位发送到总线40上。
完全一般而言,与CAN或者CAN FD相比,在具有CAN XL的总线系统中可以实现下列偏离的特性:
a)接管并且必要时适配经受考验的特性,这些经受考验的特性对CAN和CAN FD的稳健性和用户友好性负责任,尤其是具有标识符和按照CSMA/CR方法的仲裁的帧结构,
b)提高净数据传输速率,尤其是将净数据传输速率提高到大约每秒10兆位,
c)提升每帧有用数据的大小,尤其是将每帧有用数据的大小提升到约2k字节或者任意另外的值。
如在图2中示出的那样,在作为第一通信阶段的仲裁阶段451中,用户站10部分地、尤其是直至FDF位(包括该FDF位在内)使用CAN/CAN-FD所已知的根据ISO11898-1:2015的格式。而从FDF位起,用户站10在第一通信阶段中以及在第二通信阶段(数据阶段452)中使用随后描述的CAN XL格式。
在本实施例中,CAN XL和CAN FD是兼容的。在这种情况下,CAN FD所已知的res位(随后称为XLF位)被用于从CAN FD格式转换到CAN XL格式。因而,CAN FD和CAN XL的帧格式直至res位或XLF位都是相同的。接收方在res位处才识别出,以何种格式发送帧450。CAN XL用户站(亦即这里为用户站10、30)也支持CAN FD。
替选于在图2中所示的帧450,在该帧450中使用具有11位的标识符(Identifier)ID28至ID18,CAN XL扩展帧格式可选地是可能的,在该CAN XL扩展帧格式中,使用具有29位的标识符(Identifier)。这直至FDF位都与来自ISO11898-1:2015的已知的CAN FD扩展帧格式相同。
根据图2,从SOF位直至FDF位且包括FDF位在内,帧450与根据ISO11898-1:2015的CAN FD基本帧格式(Base Frame Format)相同。因而,这里不进一步阐述已知的结构。在图2中在其下部线上用粗线条示出的位在帧450中作为显性的或者‘0’被发送。在图2中在其上部线上用粗线条示出的位在帧450中作为隐性的或者‘1’被发送。在CAN XL数据阶段452中,使用对称的‘1’和‘0’电平,而不是隐性电平和显性电平。
一般而言,在产生帧450时,应用两种不同的填充规则(Stuffing-Regeln)。直至在仲裁字段453中的FDF位之前,适用CAN FD的动态的位填充规则,使得要在5个相同位之后连续地插入倒转的填充位。在直至在FCP字段之前的数据阶段452中,适用固定的填充规则,使得要在固定的位数之后插入固定填充位。替选地,不是仅插入一个填充位,而是可以插入数目为2或者更多的位作为固定填充位。
在帧450中,直接在FDF位之后跟着XLF位,该XLF位从位置来对应于为CAN FD基本帧格式的“res位”,如前面所提及的那样。如果XLF位作为1(亦即隐性的)被发送,则该XLF位由此将帧450标识为CAN XL帧。对于CAN FD帧,通信控制装置11将XLF位置为0(亦即显性的)。
在帧450中,在XLF位之后跟着resXL位,该resXL位是针对将来的使用的显性位。对于帧450,resXL必须作为0(亦即显性的)被发送。可是,如果用户站10接收到resXL位作为1(亦即隐性的),则进行接收的用户站10例如进入协议异常状态(Protocoll ExceptionState),这样如在CAN FD消息46中针对res=1所实施的那样。替选地,resXL位可能会恰好反过来定义,亦即resXL位必须作为1(亦即隐性的)被发送。在该情况下,进行接收的用户站在显性resXL位的情况下进入协议异常状态。
在帧450中,在resXL位之后跟着序列ADS(Arbitration Data Switch(仲裁数据切换)),在所述序列ADS中对预先确定的位序列进行编码。该位序列允许简单且安全地从仲裁阶段451的位速率(仲裁位速率)转换至数据阶段452的位速率(数据位速率)。例如,ADS序列的位序列包括AL1位,所述AL1位至少在最后部分作为逻辑1被发送。AL1位是仲裁阶段451的最后位。在AL1位之内,在发送/接收装置12、22、32中转换物理层。因此,在序列ADS期间,发送-接收装置12、32的运行方式也被转换。跟着的位DH1、DH2和DL1已经以数据位速率被发送。因此,位DH1、DH2和DL1在CAN XL中是数据阶段452的在时间上短的位。ADS字段被用于从第一通信阶段451过渡到第二通信阶段452。
在帧450中,在序列ADS之后跟着SDT字段,该SDT字段标明数据字段455的内容。SDT字段的内容说明,数据字段455中包含有何种类型的信息。例如,SDT字段说明,“互联网协议”(IP,Internet Protocol)帧是否位于数据字段455中,或者隧道化以太网帧(“getunnelter Ethernet Rahmen”)或者别的帧是否位于数据字段455中。
在SDT字段之后是SEC字段,该SEC字段说明,是否用CAN安全协议来保障帧450。SEC字段为1位宽,并且如SDT字段那样必须说明如下功能:在数据字段455中包含有何种类型的信息。
DLC字段紧接着SEC字段,在该DLC字段中插入数据长度码(DLC=Data LengthCode),所述数据长度码说明了在帧450的数据字段455中的数据字节的数目。数据长度码(DLC)可以取从1直至数据字段455的最大字节数或数据字段长度的任何值。如果最大数据字段长度尤其是为2048位,则在假设DLC=0意味着具有数目为1的字节的数据字段长度并且DLC=2047意味着具有数目为2048的字节数据字段长度的数据字段长度的情况下,数据长度码(DLC)需要数目为11的位。替选地,可能会允许长度0的数据字段455,如例如在CAN中那样。在这种情况下,DLC=0例如可能将对具有数目为0的字节的数据字段长度进行编码。那么,最大可编码的数据字段长度在例如11位的情况下为(2
在帧450中,在DLC字段之后跟着SBC位计数字段(填充位计数(Stuff-Bit-Count))。在该字段中,说明了在仲裁字段453中已被发送的动态填充位的数目。接收节点使用SBC位计数字段的信息,以便检查接收节点是否已接收到正确数目的动态填充位。
紧接着SBC位计数字段,跟着前言校验和PCRC,该前言校验和PCRC也称为Preface-CRC。前言校验和PCRC是用于保障帧450的帧格式的校验和,也就是说是从帧450以SOF位开始直至前言校验和PCRC的开始的所有可变位(包括直至前言校验和PCRC的开始的所有动态填充位和可选地固定填充位在内)的校验和。要根据所期望的汉明距离来选择根据循环冗余校验(CRC)的前言校验和PCRC和由此校验和多项式的长度。
在帧450中,在前言校验和PCRC之后跟着VCID(虚拟CAN总线ID(Virtual CAN BusID))字段。VCID字段具有为1个字节的长度。在VCID字段中,包含有虚拟CAN总线的编号。
在帧450中,在VCID字段之后跟着AF字段(接受字段(Acceptance Field))。AF字段具有为32位的长度。在AF字段中,包含有用于接受过滤的地址或者另一值。
在帧450中,在AF字段之后跟着数据字段455(DataField)。数据字段455由P个字节B构成,其中P在DLC字段中编码,如前面所描述的那样。P是大于或者等于1的自然数。
在帧450中,在数据字段455之后跟着具有帧校验和FCRC和FCP字段的校验和字段456。帧校验和FCRC由帧校验和FCRC的位构成。要根据所期望的汉明距离来选择帧校验和FCRC和由此CRC多项式的长度。帧校验和FCRC使整个帧450得到保障。替选地,仅数据字段455可选地利用帧校验和FCRC来保障。
在帧450中,在帧校验和FCRC之后跟着FCP字段,其中适用FCP=帧校验模式=Frame CheckPattern。FCP字段由具有尤其是位序列1100的4个位构成。接收节点借助FCP字段来检查,接收节点是否与发送数据流位同步。再者,接收节点同步到FCP字段中的下降沿。
在FCP字段之后,紧接着帧结束字段457。帧结束字段457由两个字段构成,即由DAS字段和具有至少一个位ACK和位ACK-Dlm的确认字段或者ACK字段构成。
DAS字段包含序列DAS(数据仲裁切换(DataArbitration Switch)),在所述序列DAS中,预先确定的位序列被编码。在图2中,预先确定的位序列具有位DAH、AH1、AL2。再者,可选地在DAS字段的末端设置有位AH2,所述位AH2用于保持距确认字段(ACK)的间隔。DAS字段具有至少三个位。位序列DAH、AH1、AL2允许简单和安全地从数据阶段452的数据位速率转换至仲裁阶段451的仲裁位速率。再者,在DAS字段期间,发送/接收装置12、32的运行方式被转换,可选地从运行方式FAST被转换到运行方式SLOW。例如,序列DAS的位序列具有仲裁位DAH和仲裁位AH1,所述仲裁位DAH和仲裁位AH1分别具有逻辑值1。在位DAH或者位AH1之内,从FAST_TX或者FAST_RX向SLOW转换发送-接收装置12、32的物理层(亦即运行方式)。在位AH1之后是位AL2(逻辑0)和位AH2(逻辑1)。这三个位DAH、AH1、AL2具有如下功能:在帧的末端确保总线系统的用户站的同步。由此,也确保了在接收期间已识别出错误的那些接收节点的同步。
在帧结束字段457中,在DAS字段的序列之后跟着确认字段(ACK)。在确认字段中,设置有用于确认或者不确认正确接收帧450的位。在图2的实例中,设置有ACK位和ACK-dlm位。可选地,可以附加地存在NACK位和NACK-dlm位。如果进行接收的用户站10、30已正确地接收到帧450,则所述进行接收的用户站10、30将ACK位作为显性的发送。进行发送的用户站将ACK位作为隐性的发送。因而,在帧450中最初被发送到总线40上的位可以被进行接收的用户站10、30重新写入。ACK-dlm位作为如下隐性位被发送:所述隐性位用于与另外的字段分离。NACK位和NACK-dlm位用于,进行接收的用户站可以用信号通知在总线40上对帧450的不正确接收。这些位的功能如ACK位和ACK-dlm位的功能那样。
在帧450中,在帧结束字段457之后跟着末端字段(EOF=End of Frame(帧的末端))。末端字段(EOF)的位序列用于标明帧450的末端。末端字段(EOF)负责,在帧450的末端处发送数目为8的隐性位。这是在帧450之内不能出现的位序列。经此,用户站10、20、30可以安全地识别出帧450的末端。
末端字段(EOF)具有如下长度:所述长度根据在ACK位中是已看到显性位还是已看到隐性位而是不同的。如果进行发送的用户站已接收到ACK位作为显性的,那么末端字段(EOF)具有数目为7的隐性位。否则,末端字段(EOF)只有5个隐性位长。
在帧450中,在末端字段(EOF)之后跟着帧间间隔(IFS-Inter Frame Space),该帧间间隔在图2中未示出。该帧间间隔(IFS)如在根据ISO11898-1:2015的CAN FD中那样来构建。
图3示出了如下用户站10的基本结构:所述用户站10具有通信控制装置11、发送/接收装置12和错误处理模块15,该错误处理模块15是通信控制装置11的部分。用户站30以类似的方式来建立,如在图3中所示的那样,可是与通信控制装置31和发送/接收装置32分开地布置根据图1的错误处理模块35。因而,不单独地描述用户站30。
根据图3,除了通信控制装置11和发送/接收装置12之外,用户站10还具有分配有通信控制装置11的微控制器13和系统ASIC 16(ASIC=专用集成电路),所述系统ASIC 16替选地可以是如下系统基础芯片(SBC,SystemBasis-Chip):在该系统基础芯片上,综合有多个对于用户站10的电子组件所需的功能。在系统ASIC 16中,除了发送/接收装置12之外,装入能量供给装置17,所述能量供给装置17给发送/接收装置12供给电能。能量供给装置17通常供应为5V的电压CAN_Supply。可是,视需求而定,能量供给装置17可以供应具有另外的值的另外的电压。附加地或者替选地,能量供给装置17可以构建为电流源。
错误处理模块15具有插入块151和信令块(Signalisierblock)152,该插入块151将预先确定的DAS字段1511插入到帧450中。随后,还更详尽地描述块151、152。
再者,发送/接收装置12具有发送模块121和接收模块122。即使随后始终谈及发送/接收装置12,替选地也可能的是,在发送模块121外部的单独装置中,设置接收模块122。发送模块121和接收模块122可以如在传统的发送/接收装置22中那样来建立。发送模块121尤其是可以具有至少一个运算放大器和/或晶体管。接收模块122尤其是可以具有至少一个运算放大器和/或晶体管。
发送/接收装置12连接到总线40上,更准确地说是连接到该总线40的针对CAN H或者CAN-XL H的第一总线缆芯41和该总线40的针对CAN L或者CAN-XL L的第二总线缆芯42上。针对用于给第一总线缆芯41和第二总线缆芯42供给电能、尤其是供给电压CAN-Supply的能量供给装置17,经由至少一个端子43进行电压供给。与接地或CAN GND的连接经由端子44实现。第一总线缆芯41和第二总线缆芯42利用终端电阻49来终止。
在发送/接收装置12中,第一总线缆芯41和第二总线缆芯42不仅与也被称为发射机(Transmitter)的发送模块121相连,而且与也被称为接收机(Receiver)的接收模块122相连,即使该连接在图3中为了简化未示出也如此。
在总线系统1运行时,发送模块121将通信控制装置11的发送信号TXD或者TxD转变为针对总线缆芯41、42的相对应的信号CAN-XL H和CAN-XL L,并在针对CAN H和CAN L的端子处将这些信号CAN-XL H和CAN-XL L发送到总线40上。
接收模块122从根据图4的由总线40接收到的信号CAN-XL H和CAN-XL L中形成接收信号RXD或者RxD,并将该接收信号RXD或者RxD转交给通信控制装置11,如在图3中所示的那样。除了空闲或者待机状态(Idle或者Standby),发送/接收装置12利用接收模块122在正常运行中总是听从数据或消息45、46在总线40上的传输,更确切而言与发送/接收装置12是否是消息45的发送方无关地,听从数据或消息45、46在总线40上的传输。
根据图4的实例,信号CAN-XL H和CAN-XL L至少在仲裁阶段451中具有显性的总线电平401和隐性的总线电平402,如被CAN所已知的那样。在总线40上,构造在图5中针对仲裁阶段451所示的差分信号VDIFF=CAN-XL H-CAN-XL L。在仲裁阶段451中,具有位时间t bt1的信号VDIFF的各个位可以利用为例如0.7V的接收阈值Ta而被识别出。在数据阶段452中,信号CAN-XL H和CAN-XLL的位比在仲裁阶段451中更快地被发送,亦即以更短的位时间tbt2被发送。这依据图6至图10更详尽地来描述。因此,信号CAN-XLH和CAN-XL L在数据阶段452中至少在它们的更快的位速率方面区别于传统的信号CANH和CANL。
图4中的针对信号CAN-XL H、CAN-XL L的状态401、402的次序和图5的电压VDIFF的由此而产生的变化过程仅用于阐明用户站10的功能。可视需求而定地选择针对总线状态401、402的数据状态的次序。
换言之,如果发送模块121切换到第一运行方式B451(SLOW),则该发送模块121根据图4产生作为总线状态402的第一数据状态和作为总线状态401的第二数据状态,所述总线状态402针对总线40的总线线路的两个总线缆芯41、42具有不同的总线电平,所述总线状态401针对总线40的总线线路的两个总线缆芯41、42具有同一总线电平。
此外,针对信号CAN-XL H、CAN-XL L以数据阶段452包括的第二运行方式B 452TX(FAST TX)的时间变化过程,发送模块121以较高的位速率将这些位发送到总线40上。在数据阶段452中,再者可以利用与在CAN FD中不同的物理层来产生CAN-XL H和CAN-XL L信号。经此,与在CANFD中相比,数据阶段452中的位速率还可以进一步被增加。在数据阶段452中不是帧450的发送方的用户站在它的发送/接收装置中设定第三运行方式B 452RX(FASTRX)。
为了用信号通知从运行方式B451转换到运行方式B 452TX(FAST TX)或者运行方式B 452RX(FAST RX),通信控制装置11执行发送信号TxD的脉冲宽度调制(PWM)。为此,通信控制装置11对CAN XL帧450的每个逻辑位使用一个或者多个PWM符号。原则上适用,一个PWM符号由两个相构成,即由0相和1相构成。此外,PWM符号被两个相同的边沿限制,例如被两个上升沿限制。
图3的错误处理模块15(尤其是它的插入块151)用于:如果用户站10充当帧450的发送方,则将DAS字段1511插入到帧450中。再者,错误处理模块15(尤其是它的信令块152)可以执行脉冲宽度调制(PWM),如随后针对在运行方式B 452TX(FAST TX)、B 451(SLOW)之间的转换所描述的那样。
图6关于时间t示出了在帧450的数据阶段452的末端处的范围中的最终得到的数字发送信号TxD。在帧450中,DAS字段1511被插入到位FCP3至FCP0之后。由作为帧450的发送方的通信控制装置11串行地向发送/接收装置12发送该发送信号TxD,如随后更详尽地描述的那样。直至位DAH,帧450的位具有位持续时间t bt2。从位DAH起,帧450的位具有位持续时间t bt1。在图6的实例中,位持续时间t b2比位持续时间t bt1短。
图7示出了在时间t期间由发送信号TxD而产生的状态,所述状态在通信控制装置11与发送/接收装置12之间的端子TXD处串行地出现。对此,通信控制装置11(例如错误处理模块15、尤其是信令块152)在数据阶段452中执行图6的发送信号TxD的脉冲宽度调制(PWM)。在图7中的实例中,在PWM符号SB D0中,0相比1相长,这对应于发送信号TxD中的具有逻辑值0的位。而在PWM符号SB D1中,1相比0相长,这对应于具有逻辑值1的位。当然,PWM符号SB D0、SB D1可以不同地来定义,尤其是与前面描述的恰好相反。在数据阶段452之后,发送信号TxD的脉冲宽度调制(PWM)结束,如在图6中所示。在仲裁阶段451,不进行发送信号TxD的脉冲宽度调制(PWM)。经由PWM编码的停止,并且因此经由未发生多个边沿,用信号通知从运行方式B 452TX(FAST TX)或者运行方式B 452RX(FAST RX)FAST RX到运行方式B451(SLOW)的转换。
在仲裁阶段451的末端,发送/接收装置12根据发送信号TxD的边沿的高频率而识别出,发送/接收装置12要从仲裁阶段的运行方式B 451转入快速运行方式B 452TX(FASTTX)、B 452RX(FAST RX)之一,或也要保持在那里。发送/接收装置12根据第一PWM符号或者前M个符号的值识别出,发送/接收装置12是否要转入运行方式B 452TX(FAST TX)或者运行方式B 452RX(FAST RX)。M是大于或者等于1的自然数。
图8示出了由发送/接收装置12已从图7的在端子TXD处的状态解码的信号TxD TC的时间变化过程。再者,图8示出了发送/接收装置12的运行方式。发送/接收装置12在位DAH中将其运行方式B 452TX转换到运行方式B 451,在所述运行方式B 452TX中,帧450具有带有位持续时间t_bt2的位,在所述运行方式B_451,帧450具有带有位持续时间t_bt1的位。再者,利用不同于运行方式B_452_TX中(如前面所描述的那样)的物理层,帧450的位可以以运行方式B_451被发送到总线40上。尤其是利用RC环节,发送/接收装置12可以在预先确定的持续时间T_TO(TimeOut(超时))期满之后识别出,在预先确定的时间T_TO内,没有边沿来到。如果发送/接收装置12识别出预先确定的持续时间T_TO(TimeOut)期满,则发送/接收装置12转换到其运行方式B_451(SLOW)。
发送/接收装置12因此将图7的在端子TXD处的状态解码为根据图8的信号TxD_TC。在端子TXD处的PWM符号SB_D0、SB_D1中的每个PWM符号都可以在PWM符号SB_D0、SB_D1的末端处才被解码。因此,发送/接收装置12中的解码将延迟持续时间T_VZ插入到要串行发送到总线40上的信号TxD_TC中。延迟持续时间T_VZ等于PWM符号SB_D0、SB_D1之一的符号长度的时间长度,如在图8中所示的那样。
在发送/结束装置12将图7的在端子TXD处的状态已解码成发送/接收装置12的根据图8的信号TxD_TC之后,发送/接收装置12将信号TxD_TC作为在图9中所示的差分电压VDIFF发送到总线40上。
图10关于时间t示出了在发送/接收装置12的RXD端子处的信号的变化过程。只要发送/接收装置12在运行方式B_452_TX中,发送/接收装置12就经由RXD端子将接收信号RxD作为1发送。发送/接收装置12在运行方式B_452_TX中的持续时间对应于其末端在图10中示意性示出的持续时间T_S。在运行方式B_452_TX(FAST_TX)中,适用RXD=1。在运行方式B_452中,发送/接收装置12经由端子RXD发送如下状态:所述状态对应于发送/接收装置12已从由总线40接收到的差分电压VDIFF产生的数字接收信号RxD的状态。
如在图6至图10中所示的那样,图3的错误处理模块15因此在本实施例中构建为,使得DAS字段具有两个值为1的位(DAH,AH1),继之以值为0(显性)的位(AL2)。
DAH位在DAS字段1151中是过渡位。DAH位由发送节点或由发送/接收装置12至少在最后部分以隐性电平发送。发送节点是如下用户站:所述用户站在正在进行中的数据阶段452中是帧450的发送方,并且因此将帧450发送到总线40上。随后假设:用户站10是帧450的发送节点,并且用户站30是接收节点。
在作为帧450的发送节点的用户站10中,通信控制装置11利用DAH位的起始用信号通知,发送-接收装置12必须将其运行方式从运行方式B_452_TX(FAST_TX)转换到B_451(SLOW)。例如,DAH位的起始对应于直至50%的DAH位。在预先确定的时间T_TO期满之后,发送-接收装置12基于DAH位中的信令执行其运行方式从运行方式B_452_TX(FAST_TX)到B_451(SLOW)的转换,如在图7和图8中所示的那样。在持续时间T_TO期间,根据图9的总线电平(亦即VDIFF的值)并非可靠地为隐性。
根据图6和图7,作为帧450的发送节点的用户站10(更准确地,发送/接收装置12)在最后部分以隐性电平发送DAH位。例如,该最后部分同样对应于50%。此后,用户站10完全以隐性电平发送AH1位。此后,用户站10完全以显性电平发送AL2位。因此,在预先确定的持续时间T_RB内,在总线40上构造隐性的总线状态。在图6至图9的实例中,预先确定的持续时间T_RB对应于具有位持续时间t_bt1的数目为1.5的位。
因此,根据图6至图10,FCP0位是以借助PWM符号来编码的方式向发送-接收装置12传输的最后位。在DAH位期间,通信控制装置11(尤其是错误处理模块15)将TxD信号作为1发送。因为FCP0位具有逻辑0作为值,所以逻辑0由装置12作为具有值+1V的差分电压被驱动到总线40上。在为例如500ns或者另外的值的持续时间T_TO(TimeOut)之后,发送-接收装置12识别出,在端子TXD处没有出现任何边沿。因而,发送-接收装置12将其运行方式切换到运行方式B451(SLOW),如在图8中所示。由于1施加在TxD信号上,所以发送-接收装置12现在将隐性电平驱动到总线40上。下一个AH1位同样以隐性电平被驱动到总线40上。因此,紧接在AL2位之前,发送节点产生具有持续时间T_RB的隐性电平,所述具有持续时间T_RB的隐性电平明显长于仲裁位时间t_bt1。
结果,DAS字段包含位序列110,所述位序列110在从数据阶段452转换到仲裁阶段451之前提供安全的同步边沿。由此可以确保:紧接在DAS字段中的AL2位(显性)的下降沿之前,每个接收节点(亦即在正在进行中的数据阶段452中不是帧450的发送方并且因而只是帧450的接收方的用户站)已在至少一个仲裁位的持续时间t_bt1中看到隐性电平。如果这些位缩短地到达接收方(这可能由于位非对称性的效应而出现),那么这也还适用。位非对称性通过非理想的部件、如发送-接收装置12、22、32(收发器)、终端电阻、短截线等得到实现。因此,每个接收节点都看到在AH1与AL1之间的边沿之前的至少一个隐性位,这是针对同步的必要的先决条件。
由此,错误处理是可能的,在所述错误处理中,接收节点并不发送错误帧47,而是在所述错误处理中,当接收节点已看到错误时,接收节点如下地采取行动。如果看到错误,则接收节点(例如用户站30)将它的发送-接收装置32切换到仲裁阶段451的运行方式(SLOW运行方式),如果发送-接收装置32并未事先已经在该运行方式中则如此,而且接收节点等待由仲裁阶段451的11个隐性位构成的总线空闲序列,如前面所描述的那样。接着,通过具有位序列110的DAS字段,在总线空闲序列开始之前,所需的安全同步边沿准备就绪。
根据本实施例的修改方案,通信控制装置11(例如错误处理模块15、尤其是信令块152)不给发送-接收装置12用信号通知,要将发送-接收装置12切换到运行方式B_452_TX(FAST_TX)。替选地,在用户站10中,针对通信控制装置11可以存在发送-接收装置、尤其是发送-接收装置22,所述发送-接收装置没有运行方式B_452_TX(FAST_TX)或者B_452_RX(FAST_RX)。在这两个替选方案中,发送节点将DAH位作为隐性位发送,因为该DAH位是逻辑‘1’。
对于这种修改方案及其替选方案也确保:每个接收节点紧接在DAS字段中的AL2位(显性)的下降沿之前已在至少持续时间t_b1中看到隐性电平,所述持续时间t_b1是仲裁位的持续时间。
图11至图15示出了根据第二实施例的时间变化过程,所述根据第二实施例的时间变化过程在随后的方面区别于图6至图10的时间变化过程。
如在图12中所示,在DAH位的起始处发送至少一个PWM符号,所述至少一个PWM符号对应于逻辑值1。在图12的实例中,发送PWM符号SB_D1。对此,通信控制装置11(例如错误处理模块15、尤其是信令块152)执行DAH位的相对应的脉冲宽度调制(PWM)。紧接着,通信控制装置11(例如错误处理模块15、尤其是信令块152)在DAH位期间将TxD信号作为1发送。
因为最后已发送逻辑1的PWM符号,所以图13的信号TxD_TC在DAH位的起始处已经同样是逻辑1。因此,在DAH位的持续时间T_TO(TimeOut)(图12)内,差分电压VDIFF具有值-1V,如在图14中所示。
在为例如500ns或者另外的值的持续时间T_TO(TimeOut)(图12)之后,发送-接收装置12识别出,在端子TXD处没有出现任何边沿。因而,发送-接收装置12将其运行方式切换到运行方式B_451(SLOW),如在图13中所示。由于1施加在TxD信号上,所以发送-接收装置12现在将隐性电平驱动到总线40上。下一个AH1位同样以隐性电平被驱动到总线40上。
因此,即使在本实施例中,发送节点紧接在AL2位之前产生隐性电平,该隐形电平明显长于仲裁位时间tbt1。
另外,这两个实施例的总线系统1的作用方式是相同的。
图16至图20示出了根据第三实施例的时间变化过程,所述根据第三实施例的时间变化过程在随后的方面区别于图6至图10的时间变化过程。
如在图17中所示,通信控制装置11(例如错误处理模块15、尤其是信令块152)在DAH位的起始处发送PWM符号,该PWM符号对应于逻辑值0,可是没有结束边沿。在这种情况下,在图17的实例中,发送没有结束边沿的PWM符号SB_D0。紧接着,通信控制装置11(例如错误处理模块15、尤其是信令块152)将TxD信号作为0发送,直到发送-接收装置12在DAH位期间将其运行方式切换到或已转入运行方式B_451(SLOW),如在图18中所示。
在为例如500ns或者另外的值的持续时间T_TO(TimeOut)(图17)之后,发送-接收装置12识别出,在端子TXD处没有出现任何边沿。因而,发送-接收装置12将其运行方式切换到运行方式B_451(SLOW),如在图18中所示。由于根据图17的在端子TXD处的信号在该时刻还具有值0,所以发送-接收装置12将显性电平驱动到总线40上。因而,差分电压VDIFF具有值+2V,如在图19中所示。
通信控制装置11(例如错误处理模块15、尤其是信令块152)依据在RXD端子处的值来识别出运行方式B_451(SLOW),如在图20中所示。在运行方式B 452TX(FAST TX)中,适用RXD=1,如通过图20中的持续时间T S所标明的那样。在运行方式B 451(SLOW)中,在RXD端子处的值是在总线40上的差分电压VDIFF的逻辑值,如在图19和图20中所示的那样。
通信控制装置11(例如错误处理模块15、尤其是信令块152)一根据RXD的值(RXD=0)识别出发送-接收装置12被切换到运行方式B 451(SLOW),通信控制装置11(例如错误处理模块15、尤其是信令块152)就针对DAH位的剩余部分根据图17在端子TXD处将根据图16的TxD信号作为1发送。下一个AH1位同样以隐性电平被驱动到总线40上。
因此,即使在本实施例中,发送节点也紧接在AL2位之前产生隐性电平,该隐形电平明显长于仲裁位时间t bt1。
另外,总线系统1的作用方式与其他实施例的总线系统的作用方式相同。
此外,这三个实施例的不同之处在于,从哪个差分电压VDIFF过渡到针对隐性电平的差分电压VDIFF=0。在这种情况下,针对使用发送/接收装置的运行方式转换的情况,存在三种可能性,因为除了差分电压VDIFF=0的隐性电平之外,还存在其他三种:针对显性的VDIFF=+2V,针对数据阶段中的逻辑0的VDIFF=+1V,和针对数据阶段452中的逻辑1的VDIFF=-1V。
可以单个地或者以所有可能的组合来使用用户站10、20、30、总线系统1和在其中实施的方法的所有前面描述的构建方案。尤其是,前面所描述的实施例的所有特征和/或这些实施例的修改方案的所有特征可以被任意组合。附加地或者替选地,尤其是可设想下列修改方案。
即使前面以CAN总线系统为例描述了本发明,本发明也可以在任何通信网络和/或通信方法中被采用,其中使用两个不同的通信阶段,在所述两个不同的通信阶段中,针对不同的通信阶段产生的总线状态不同。尤其是,在开发别的串行通信网络(如以太网和/或100Base-T1以太网、现场总线系统等)时,可采用本发明。
尤其是,根据这些实施例的总线系统1可以是如下通信网络:在所述通信网络中,可以串行地以两种不同的位速率来传输数据。有利地,可是非强制性的前提是,在总线系统1中,至少在确定的时期内保证用户站10、20、30对共同的通道的独占的、无冲突的访问。
当然,DAS字段可以具有已在三个实施例中被描述的多于三个的位。在这种情况下,只要求字段(DAS)在边沿之前具有预先确定的长度,所述预先确定的长度具有如下持续时间T RB:所述持续时间T RB长于仲裁阶段451(第一通信阶段)的位时间t bt1的持续时间。优选地,持续时间T RB等于或者大于仲裁阶段451的1.5位的持续时间,如前面所描述的那样。
这些实施例的总线系统1中的用户站10、20、30的数目和布局是任意的。尤其是可以取消总线系统1中的用户站20。可能的是,在总线系统1中存在用户站10或者30中的一个或者多个。可设想的是,总线系统1中的所有用户站都相同地来构建,亦即仅存在用户站10,或者仅存在用户站30。
- 串行总线系统的用户站和在串行总线系统中通信的方法
- 串行总线系统的用户站和在串行总线系统中通信的方法