一种自动化电池包装生产线
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及电池包装技术领域,具体涉及一种自动化电池包装生产线。
背景技术
电池大致分为碳性电池、锂电池、碱性电池、镍镉电池和镍氢电池。其中,锂电池是以锂金属或锂合金为阳极材料,使用非水电解质溶液的电池;生活中,锂电池往往需要多节搭配使用,因此,在锂电池的生产加工中,往往需要将多节锂电池通过同一包装盒进行包装,利于后续的售卖等环节。
但是在实际生产过程中发现,锂电池包装时由于销售的需要,往往需要多种规格包装,而多种规格包装的电池生产线在切换时,需要等待前一种规格使用完后,再进行切换下一规格的包装,因此会存在切换等待的时间问题,若能够进行改进,则可以在实际切换包装规格时,缩短等待间隔,提高整体的包装生产效率。
为了解决上述问题,本发明中提出了一种自动化电池包装生产线。
发明内容
本发明的目的在于提供一种自动化电池包装生产线,以解决锂电池包装时因为销售的需要,往往需要多种规格包装,而多种规格包装的电池生产线在切换时,需要等待前一种规格使用完后,再进行切换下一规格的包装,导致切换等待的时间问题。
为了实现本发明的目的,本发明所采用的技术方案为:
一种自动化电池包装生产线,包括依次设置的上料机构、定量机构和包装机构,所述上料机构用于将待包装的电池放置在输送带上,所述定量机构用于将一组电池推动到包装机构上,所述包装机构用于对成组进入的电池进行包装;
所述包装机构包括:
轮架,所述轮架固定安装在地面上;
支架,所述支架设有多个,多个所述支架共同固定连接在轴体上,沿所述轴体圆周等距分布,所述轴体转动连接在所述轮架上,并穿过所述轮架与被动齿轮固定连接,所述被动齿轮与主动齿轮啮合,所述主动齿轮传动连接在伺服电机的输出端上,所述伺服电机安装在所述轮架上;
夹具,所述夹具可拆卸固定在所述支架,所述夹具用于夹持所述包装盒;
其中,所述夹具包括:
夹具体,所述夹具体设置成半框型结构;
滑片,每个夹具体上远离所述轮架中心的一侧设置有一个滑片;
滑槽,所述夹具体的内底壁或内顶壁上设置有滑槽,所述滑片滑动安装在所述滑槽内。
进一步的,所述定量机构包括:
推杆,所述推杆位于所述输送带一侧,且所述推杆一端固定在架体上;
推板,所述推板固定在所述推杆的伸缩端上;
伸长槽,所述伸长槽开设在所述推板朝向所述输送带的侧面的其中一端;
伸长板,所述伸长槽内滑动连接有一个所述伸长板;
伸缩气缸,所述伸缩气缸固定安装在所述推板上,且所述伸缩气缸的端部固定在所述伸长板上。
进一步的,所述上料机构包括:
储料盒,所述储料盒安装在架体上,所述储料盒底部设置有电池出口;
承载轮,所述承载轮转动安装在所述架体上,所述承载轮上沿周向等距分布有多个承载槽,所述承载轮外圈与所述储料盒的电池出口处贴合设置;
驱动电机,所述驱动电机与所述承载轮传动连接,且用于驱动所述承载轮转动。
进一步的,所述夹具还包括:
拉绳,所述滑片一侧固定有拉绳,所述拉绳穿出所述夹具体后连接在一个磁体上;
所述架体的底部设置有电磁铁,当所述磁体转动到所述电磁铁的正上方时两者对应。
进一步的,所述夹具体的顶壁上还设置有联动组件,所述联动组件用于带动对应的所述滑片向中部移动。
进一步的,所述联动组件包括:
配重槽,所述配重槽贯穿设置在所述夹具体顶部壁厚内;
配重块,所述配重块滑动安装在所述配重槽内,所述拉绳顺沿所述夹具体的内顶壁进入到配重槽,并串联在所述配重块上,后导出所述配重槽外侧;
支撑弹簧,所述支撑弹簧一端固定连接在所述配重槽远离所述输送带的一侧侧壁上,另一端与所述配重块接触;
所述推板顶部固定设置凸块,所述凸块形状与所述配重槽截面形状相匹配。
进一步的,所述输送带上设置有挡板,所述挡板固定在所述输送带的架子上,且所述挡板底面与所述输送带上表面接触。
进一步的,所述自动化电池包装生产线还包括同步模块,所述同步模块用于同步调节推板和夹具的规格;
进一步的,所述同步模块包括:
距离检测单元,所述距离检测单元包括距离传感器,所述距离传感器固定在所述滑片朝向滑槽的一侧,所述距离检测单元用于实时检测所述滑片与所述滑槽底面之间的距离,并获取与所述推板正对的当前夹具的距离值X,X为所述滑片与所述滑槽底面之间的距离值;
处理单元,所述处理单元用于根据公式Y=X-Z计算出伸缩气缸伸长的长度,其中伸缩气缸伸长的长度值为Y,所述推板的长度值为Z;且所述X≥Z
执行单元,所述执行单元用于根据处理单元计算出的长度值Y执行伸缩气缸的伸长调整。
A.本发明通过上料机构的设置,只需要在储料盒内存储同规格的电池,即可通过驱动电机带动所述承载轮转动,由于承载轮顶部一部分区域与储料盒底部贴合,因此当承载轮上的承载槽移动到电池出口处,两者处于正对状态下,储料盒的电池在自重作用下自动落到承载槽内,随着该承载槽移动到输送带上方时,逐渐向下倾斜的姿态,又让电池在自重下落到输送带上,实现了电池的自动上料,并且可随时进行电池的补充和输送,在承载轮停止转动时,电池即停止上料;
B.在需要改变包装规格时,本发明可通过伸缩气缸伸长,带动相连的伸长板向外移动,通过伸长板外端与推板端部的距离作为补偿距离,扩大推板的有效作用长度,从而实现单次定量推动的电池数量,进而实现电池包装规格更换的快捷反应,缩短切换包装盒规格的等待时长,进一步提高电池包装生产线的生产效率;
C.本发明通过联动组件,一方面能够将包装机构和定量机构相互联动,利用定量机构中推板向包装机构中夹具体移动的过程,加强对包装盒的夹紧,保持推电池进入时的准确性,提高包装效率;另一方面凸块和配重槽配合,可实现推板与夹具体之间的配合,让推板始终保持与夹具体上包装盒平行的状态,达到快速推动电池进入的目的。
附图说明
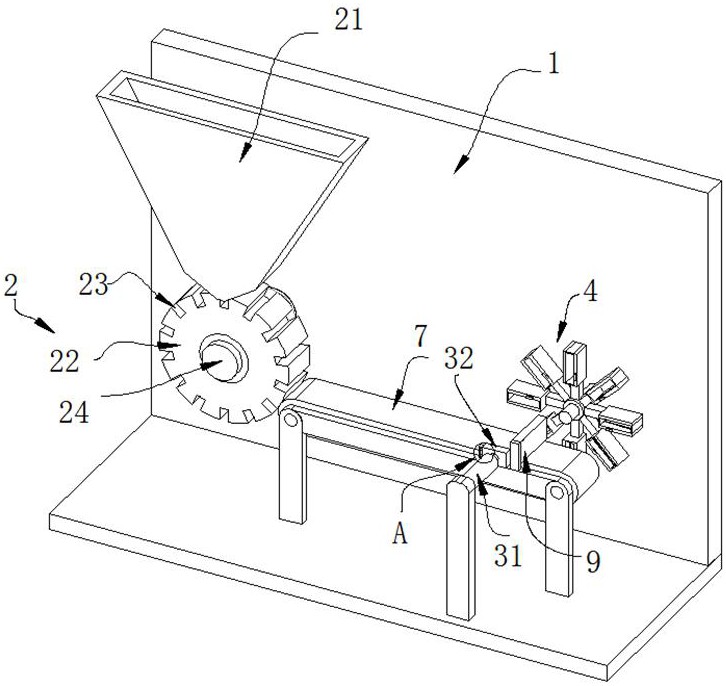
图1为本发明自动化电池包装生产线的实施例的立体结构示意图;
图2为本发明中包装机构的局部立体示意图;
图3为本发明中包装机构的后视图;
图4为本发明中夹具体正视状态下的内部结构示意图;
图5为本发明中推板沿输送带向夹具体移动状态下,联动组件的工作示意图;
图6为图1中A处局部放大示意图。
附图标记如下:
1、架体;2、上料机构;21、储料盒;22、承载轮;23、承载槽;24、驱动电机;3、定量机构;31、推杆;32、推板;33、伸长槽;34、伸长板;35、伸缩气缸;4、包装机构;41、轮架;42、支架;43、被动齿轮;44、主动齿轮;45、伺服电机;46、夹具体;47、滑片;48、滑槽;49、拉绳;5、磁体;6、电磁铁;7、输送带;8、联动组件;81、配重槽;82、配重块;83、支撑弹簧;84、凸块;9、挡板;10、距离传感器。
具体实施方式
下面结合附图1-6和实施例对本发明进一步说明:
一种自动化电池包装生产线,包括依次设置的上料机构2、定量机构3和包装机构4,所述上料机构2用于将待包装的电池放置在输送带7上,所述定量机构3用于将一组电池推动到包装机构4上,所述包装机构4用于对成组进入的电池进行包装;
所述包装机构4包括:
轮架41,所述轮架41固定安装在地面上;
支架42,所述支架42设有多个,多个所述支架42共同固定连接在轴体上,沿所述轴体圆周等距分布,所述轴体转动连接在所述轮架41上,并穿过所述轮架41与被动齿轮43固定连接,所述被动齿轮43与主动齿轮44啮合,所述主动齿轮44传动连接在伺服电机45的输出端上,所述伺服电机45安装在所述轮架41上;
夹具,所述夹具可拆卸固定在所述支架42,所述夹具用于夹持所述包装盒;
其中,所述夹具包括:
夹具体46,所述夹具体46设置成半框型结构;
滑片47,每个夹具体46上远离所述轮架41中心的一侧设置有一个滑片47;
滑槽48,所述夹具体46的内底壁或内顶壁上设置有滑槽48,所述滑片47滑动安装在所述滑槽48内。
所述夹具还包括:
拉绳49,所述滑片47一侧固定有拉绳49,所述拉绳49穿出所述夹具体46后连接在一个磁体5上;
所述架体1的底部设置有电磁铁6,当所述磁体5转动到所述电磁铁6的正上方时两者对应。
所述输送带7上设置有挡板9,所述挡板9固定在所述输送带7的架子上,且所述挡板9底面与所述输送带上表面接触。
进一步的,所述上料机构2包括:
储料盒21,所述储料盒21安装在架体1上,所述储料盒21底部设置有电池出口;
承载轮22,所述承载轮22转动安装在所述架体1上,所述承载轮22上沿周向等距分布有多个承载槽23,所述承载轮22外圈与所述储料盒21的电池出口处贴合设置;
驱动电机24,所述驱动电机24与所述承载轮22传动连接,且用于驱动所述承载轮22转动。
本发明为了可以在实际切换包装规格时,缩短等待间隔,提高整体的包装生产效率,设置了上料机构2、定量机构3和包装机构4,通过上料机构2的设置,只需要在储料盒21内存储同规格的电池,即可通过驱动电机24带动所述承载轮22转动,由于承载轮22顶部一部分区域与储料盒21底部贴合,因此当承载轮22上的承载槽23移动到电池出口处,两者处于正对状态下,储料盒21的电池在自重作用下自动落到承载槽23内,随着该承载槽23移动到输送带7上方时,逐渐向下倾斜的姿态,又让电池在自重下落到输送带7上,实现了电池的自动上料,并且可随时进行电池的补充和输送,在承载轮22停止转动时,电池即停止上料;输送带7将电池向定量机构3和包装机构位置处输送,先经过定量机构3将每次需要数量的电池推入到打包盒内后,包装机构带动打包盒移走进行封口即可;其中输送带7上设置的挡板9,能够阻挡电池移出输送带7,同时可作为基准,方便定量机构3和包装机构对每次电池数量的确定;定量机构3与包装机构配合,可自动实现不同规格电池打包的需求,切换时间短,可有效提高整体电池打包生产的效率;
为了适应不同规格的打包盒,从而设置了包装机构,利用伺服电机45驱动齿轮组传动,带动支架42和夹具转动,实现了将正下方工位上安放的包装盒沿顺时针方向转动90度后正好与输送带7平行且与推板32位置正对,从而更好的实现承接推板32推来的电池组;
相较于现有技术中通过更换不同夹具以适应不同包装盒的方式而言,本发明中采用了自适应调节夹具夹持规格的方式,无需更换夹具即可实现不同包装规格的切换,方便快捷,包装效率明显提升;具体的,在使用时,当夹具体46位于正下方时,电磁铁6会对正上方的磁体5进行磁性斥力,从而使得磁体5处于向上托住的状态,于是失去磁体5自重下坠作用力的拉绳49,无法继续牵引滑片47,滑片47处于自由滑动状态,因此该工位可直接放置长度不同的包装盒,以适应不同规格的包装需求;当该包装盒顺时针90度后到达与输送带7水平的位置时,该包装盒的磁体5脱离电磁铁6的斥力,因此会在自重下坠落,从而牵引拉绳49和滑片47自动向内收缩,进而实现对包装盒的自动夹紧,保持包装盒的自动限位;只需等待定量机构3推动对应数量的电池进入到包装盒内,随后再继续转动90度后,取出包装盒进行封口后,即可完成电池的包装;且可自由切换包装的规格,灵活度更高。
所述定量机构3包括:
推杆31,所述推杆31位于所述输送带7一侧,且所述推杆31一端固定在架体1上;
推板32,所述推板32固定在所述推杆31的伸缩端上;
伸长槽33,所述伸长槽33开设在所述推板32朝向所述输送带7的侧面的其中一端;
伸长板34,所述伸长槽33内滑动连接有一个所述伸长板34;
伸缩气缸35,所述伸缩气缸35固定安装在所述推板32上,且所述伸缩气缸35的端部固定在所述伸长板34上。
本实施例中,定量机构3的工作过程如下:当挡板9前方堆积单次数量规格符合的电池后,电动的推杆31伸长,推杆31带动推板32向电池移动,并将输送带7上的电池向包装机构推动,从而实现单次多数量的电池推动;并且在需要改变包装规格时,本发明可通过伸缩气缸35伸长,带动相连的伸长板34向外移动,通过伸长板34外端与推板32端部的距离作为补偿距离,扩大推板32的有效作用长度,从而实现单次定量推动的电池数量,进而实现电池包装规格更换的快捷反应,缩短切换包装盒规格的等待时长,进一步提高电池包装生产线的生产效率。
所述夹具体46的顶壁上还设置有联动组件8,所述联动组件8用于带动对应的所述滑片47向中部移动;所述联动组件8包括:
配重槽81,所述配重槽81贯穿设置在所述夹具体46顶部壁厚内;
配重块82,所述配重块82滑动安装在所述配重槽81内,所述拉绳49顺沿所述夹具体46的内顶壁进入到配重槽81,并串联在所述配重块82上,后导出所述配重槽81外侧;
支撑弹簧83,所述支撑弹簧83一端固定连接在所述配重槽81远离所述输送带的一侧侧壁上,另一端与所述配重块82接触;
所述推板32顶部固定设置凸块84,所述凸块84形状与所述配重槽81截面形状相匹配。
本实施例中,设置了联动组件8,当推板32推动电池组沿输送带7表面移动,直至进入到包装盒内时,推板32顶部设置的凸块84与夹具体顶部设置的配重槽81相互靠近,并正好进入到配重槽81内,从而对配重槽81内的配重块82进行推动动作,使得配重块82在原有磁体5自重下位移距离的基础上进一步沿配重槽81向后移动,于是带动串连的拉绳49向下进一步伸长,此时拉绳49底部的磁体的高度也进一步下移,于是拉绳49会进一步牵引滑片47沿滑槽48向内滑动,从而达到收缩滑片与所述夹具体46右侧壁之间距离的目的,继而实现了进一步夹紧包装盒,以配合推板32推动电池进入;
通过联动组件8,一方面能够将包装机构4和定量机构3相互联动,利用定量机构3中推板32向包装机构4中夹具体46移动的过程,加强对包装盒的夹紧,保持推电池进入时的准确性,提高包装效率;另一方面凸块84和配重槽81配合,可防止推板32和夹具体46之间位置错位,导致部分电池掉落无法进入包装盒的问题,进而实现推板32与夹具体46之间的配合,让推板32始终保持与夹具体46上包装盒平行匹配的状态,达到快速推动电池进入的目的。
所述自动化电池包装生产线还包括同步模块,所述同步模块用于同步调节推板32和夹具的规格;
所述同步模块包括:
距离检测单元,所述距离检测单元包括距离传感器10,所述距离传感器10固定在所述滑片47朝向滑槽48的一侧,所述距离检测单元用于实时检测所述滑片47与所述滑槽48底面之间的距离,并获取与所述推板32正对的当前夹具的距离值X,X为所述滑片47与所述滑槽48底面之间的距离值;
处理单元,所述处理单元用于根据公式Y=X-Z计算出伸缩气缸35伸长的长度,其中伸缩气缸35伸长的长度值为Y,所述推板32的长度值为Z;且所述X≥Z
执行单元,所述执行单元用于根据处理单元计算出的长度值Y执行伸缩气缸35的伸长调整。
本实施例中,通过同步模块中距离检测单元、处理单元和执行单元的设置,从而能够根据夹具的规格实时改变推板32的规格,以达到精细化匹配,实时切换包装规格的目的,切换时间短,效率高;
需要说明的是,在夹具体46底部可设置接近开关,每当该夹具达到与输送带7平行的状态时,接近开关打开,该夹具上的距离检测单元通电工作,从而实现推板32与夹具相对时的同步调节。
本发明有益效果:
本发明为了可以在实际切换包装规格时,缩短等待间隔,提高整体的包装生产效率,设置了上料机构2、定量机构3和包装机构4,通过上料机构2的设置,只需要在储料盒21内存储同规格的电池,即可通过驱动电机24带动所述承载轮22转动,由于承载轮22顶部一部分区域与储料盒21底部贴合,因此当承载轮22上的承载槽23移动到电池出口处,两者处于正对状态下,储料盒21的电池在自重作用下自动落到承载槽23内,随着该承载槽23移动到输送带7上方时,逐渐向下倾斜的姿态,又让电池在自重下落到输送带7上,实现了电池的自动上料,并且可随时进行电池的补充和输送,在承载轮22停止转动时,电池即停止上料;输送带7将电池向定量机构3和包装机构位置处输送,先经过定量机构3将每次需要数量的电池推入到打包盒内后,包装机构带动打包盒移走进行封口即可;其中输送带7上设置的挡板9,能够阻挡电池移出输送带7,同时可作为基准,方便定量机构3和包装机构对每次电池数量的确定;定量机构3与包装机构配合,可自动实现不同规格电池打包的需求,切换时间短,可有效提高整体电池打包生产的效率;
定量机构3的工作过程如下:当挡板9前方堆积单次数量规格符合的电池后,电动的推杆31伸长,推杆31带动推板32向电池移动,并将输送带7上的电池向包装机构推动,从而实现单次多数量的电池推动;并且在需要改变包装规格时,本发明可通过伸缩气缸伸长,带动相连的伸长板34向外移动,通过伸长板34外端与推板32端部的距离作为补偿距离,扩大推板32的有效作用长度,从而实现单次定量推动的电池数量,进而实现电池包装规格更换的快捷反应,缩短切换包装盒规格的等待时长,进一步提高电池包装生产线的生产效率;
本发明为了适应不同规格的打包盒,从而设置了包装机构,利用伺服电机45驱动齿轮组传动,带动支架42和夹具转动,实现了将正下方工位上安放的包装盒沿顺时针方向转动90度后正好与输送带7平行且与推板32位置正对,从而更好的实现承接推板32推来的电池组;
相较于现有技术中通过更换不同夹具以适应不同包装盒的方式而言,本发明中采用了自适应调节夹具夹持规格的方式,无需更换夹具即可实现不同包装规格的切换,方便快捷,包装效率明显提升;具体的,在使用时,当夹具体46位于正下方时,电磁铁6会对正上方的磁体5进行磁性斥力,从而使得磁体5处于向上托住的状态,于是失去磁体5自重下坠作用力的拉绳49,无法继续牵引滑片47,滑片47处于自由滑动状态,因此该工位可直接放置长度不同的包装盒,以适应不同规格的包装需求;当该包装盒顺时针90度后到达与输送带7水平的位置时,该包装盒的磁体5脱离电磁铁6的斥力,因此会在自重下坠落,从而牵引拉绳49和滑片47自动向内收缩,进而实现对包装盒的自动夹紧,保持包装盒的自动限位;只需等待定量机构3推动对应数量的电池进入到包装盒内,随后再继续转动90度后,取出包装盒进行封口后,即可完成电池的包装;且可自由切换包装的规格,灵活度更高;
本实施例中,本发明设置了联动组件8,当推板32推动电池组进入到包装盒内时,推板32顶部设置的凸块84正好进入到配重槽81内,对配重槽81内的配重块82进行推动,使得配重块82在原有磁体5自重下位移距离的基础上进一步背向移动,于是达成了进一步牵引滑片向内收缩的目的,同时也实现了进一步夹紧包装盒,以配合推板32推动电池进入;
通过联动组件8,一方面能够将包装机构4和定量机构3相互联动,利用定量机构3中推板32向包装机构4中夹具体46移动的过程,加强对包装盒的夹紧,保持推电池进入时的准确性,提高包装效率;另一方面凸块84和配重槽81配合,可实现推板32与夹具体46之间的配合,让推板32始终保持与夹具体46上包装盒平行的状态,达到快速推动电池进入的目的;
通过同步模块中距离检测单元和执行单元的设置,从而能够根据夹具的规格实时改变推板32的规格,以达到精细化匹配,实时切换包装规格的目的,切换时间短,效率高;需要说明的是,在夹具体46底部可设置接近开关,每当该夹具达到与输送带7平行的状态时,接近开关打开,该夹具上的距离检测单元通电工作,从而实现推板32与夹具相对时的同步调节。
本发明的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本发明的精神,并做出不同的引申和变化,但只要不脱离本发明的精神,都在本发明的保护范围内。
- 一种用于磁钢充磁包装自动化生产线上料的物料输送机
- 一种电器自动化包装生产线
- 一种用于锂电池自动化装备生产线的浆料搅拌装置
- 电池注液机构及其软包装锂电池自动化生产线
- 电池封装机构及其软包装锂电池自动化生产线