一种使用LoRa通信的车载组合定位装置及定位方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及定位装置领域,尤其涉及一种使用LoRa通信的GNSS/INS车载组合定位装置及定位方法。
背景技术
现在,在运载工具上安装卫星导航定位装置非常普遍,为驾驶者和管理者提供运载工具的位置信息,配合电子地图还能提供路线规划和导航服务。工业园区或厂区内的工业车辆,如叉车、平板车,作为特等运输车辆在园区内部道路低速行驶运输各种物资,对这类车辆卫星定位能为车辆的管理和调度提供有效手段,尤其是提高车辆使用率降低运营成本上成效显著。
但目前的卫星导航定位装置存在的两个问题:
(1)在卫星信号被遮挡的地方,例如仓库、厂房、风雨棚等,卫星导航定位装置会失效。而工业车辆要频繁出入此类场所,以至于一旦车辆进入这类场所,车辆的位置无法获取从而不能对车辆进行管理和调度。
(2)目前用于车辆定位的卫星导航定位装置只为驾驶员服务或者将装置接入电信运营商网络将定位信息发送出去,而作为工业车辆的所有者和运营者出于对商业信息保密的考虑不想将车辆信息发送到电信运营商网络倾向于建设私有无线通信网覆盖整个园区或企业。目前WiFi、蓝牙是常用的组建私有局域网的无线通信技术,但这两种方式存在通信距离短、信号稳定性差、信号易被遮挡等问题,无法用于车辆的通信。
发明内容
本发明的目的是提供一种使用LoRa通信的车载组合定位装置及定位方法,解决卫星定位装置在卫星信号不能接收到的情况下,无法提供较高定位精度和定位信息不能实时无线通信的问题。
为了实现上述目的,本发明的技术方案是:
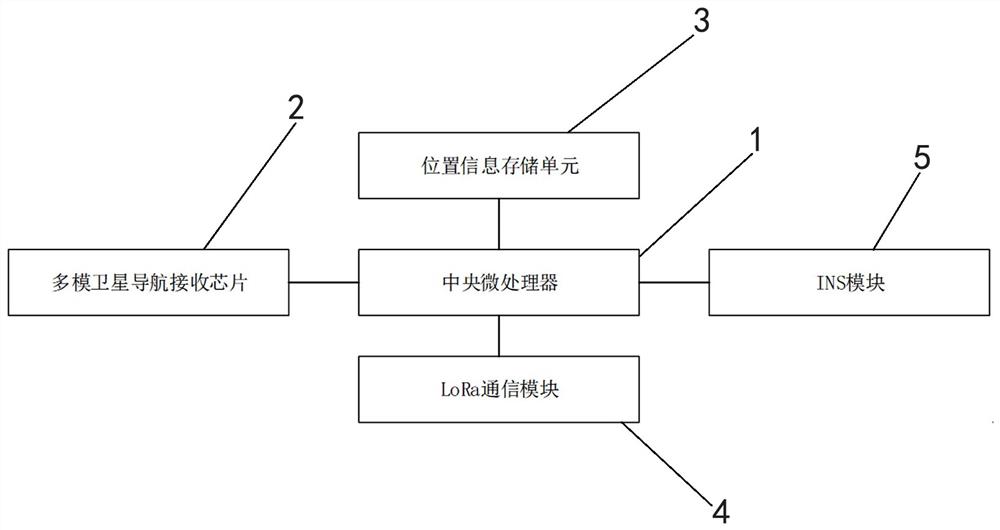
一种使用LoRa通信的车载组合定位装置,其特征在于,包括微处理器、位置信息存储单元、多模卫星导航接收芯片、INS模块和LoRa通信模块,所述微处理器分别与多模卫星导航接收芯片、INS模块、LoRa通信模块和位置信息存储单元连接。
进一步地,所述INS模块包括陀螺仪和加速度计。
一种使用LoRa通信的车载组合定位方法,其特征在于,INS模块的工作流程包括以下步骤:
步骤S11)从微处理器获取初始位置信息,跳转步骤S12;
步骤S12)完成初始位置对准,跳转步骤S13;
步骤S13)读取陀螺仪的加速度计的数据,跳转步骤S14;
步骤S14)解算出位置信息,跳转步骤S15;
步骤S15)发送位置信息到微处理器,返回步骤S13。
进一步地,位置信息存储单元的工作流程包括以下步骤:
步骤S21)获取卫星定位信号,跳转步骤S22;
步骤S22)微处理器处理得到位置信息,跳转步骤S23;
步骤S23)替换存储器中旧位置信息。
进一步地,LoRa通信模块的工作流程包括以下步骤:
步骤S31)获取位置信息,跳转步骤S32;
步骤S32)位置信息打包、解密,跳转步骤S33;
步骤S33)发出位置信息,返回步骤S31。
进一步地,微处理器的工作流程包括以下步骤:
步骤S41)判断卫星信号是否接收正常,若是,跳转步骤S45,若否,跳转步骤S42;
步骤S42)获取位置信息存储单元中的位置数据,跳转步骤S43;
步骤S43)判断INS模块是否完成初始位置对准,若是,跳转S44,若否,跳转步骤S42;
步骤S44)获取INS模块定位数据,跳转步骤S45;
步骤S45)得到车辆当前位置信息,跳转步骤S46;
步骤S46)将车辆当前位置信息输出到LoRa模块,同时更新位置信息存储单元中的位置数据。
本发明车载组合定位装置中,除了采用INS模块进行定位外,还对INS模块输出的定位数据进行处理得出经纬度值,使得LoRa模块的数据传输量大幅减少但不影响定位精度同时能满足时延要求。
本发明解决了LoRa技术不适用惯导数据传输的难题,将LoRa这种私有、远距离、低成本、低功耗和安全的窄带通信技术应用于车载组合定位装置满足特定行业需求。
附图说明
图1为本发明车载组合定位装置的结构示意图;
图2为图1中INS模块的流程图;
图3为图1中位置信息存储单元的流程图;
图4为图1中LoRa通信模块的流程图;
图5为图1中微处理器的流程图。
附图标记:
1微处理器2多模卫星导航接收芯片3位置信息存储单元4LoRa通信模块
5INS模块。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明公开了一种使用LoRa通信的车载组合定位装置,如图1所示,包括微处理器1、位置信息存储单元3、多模卫星导航接收芯片2、INS模块5和LoRa通信模块4,所述微处理器1分别与多模卫星导航接收芯片2、INS模块5、LoRa通信模块4和位置信息存储单元3连接,所述INS模块5包括陀螺仪和加速度计,在多模卫星导航接收芯片2由于失去卫星信号不能正常工作时在微处理器1的控制下启动工作,以期能够持续得到位置数据。
实施时,微处理器1从位置信息存储单元3中读取备用位置信息作为车辆位置信息,INS模块5接收来自微处理器1的车辆位置信息完成初始位置对准,然后采集所述陀螺仪和加速度计的输出数据做积分运算得到第二位置信息并传送给微处理器1。
微处理器1以第一位置信息作为输入处理得到车辆当前位置信息持续更新位置信息存储单元3。当失去卫星信号时,则位置信息存储单元3将最近一次得到的位置信息作为输入保存。
微处理器1接收第一位置信息和第二位置信息。当能正常获取第一位置信息时,将第一位置信息处理得到车辆当前位置信息;当无法获取第一位置信息,则将第二位置信息处理得到车辆当前位置信息,微处理器1将车辆当前位置信息处理成度分格式的经纬度数值发送给LoRa通信模块4,LoRa通信模块4将接收到的经纬度数值打包、加密发出。
一种使用LoRa通信的车载组合定位方法,其特征在于,INS模块5的工作流程包括以下步骤:
步骤S11)从微处理器1获取初始位置信息,跳转步骤S12;
步骤S12)完成初始位置对准,将车辆的位置作为初始信息输入INS模块5作为积分运算的起点,跳转步骤S13;
步骤S13)读取陀螺仪的加速度计的数据,跳转步骤S14;
步骤S14)INS模块5通过积分运算解算得到车辆的当前位置信息(第二位置信息),跳转步骤S15;
步骤S15)发送当前位置信息到微处理器1,返回步骤S13。
位置信息存储单元3的工作流程包括以下步骤:
步骤S21)通过多模卫星导航接收芯片2接收卫星定位信号并处理输出第一位置信息,跳转步骤S22;
步骤S22)微处理器1对第一位置信息进一步处理得到当前位置信息,跳转步骤S23;
步骤S23)将微处理器1处理得到位置信息存入存储器,如果存储器中保存有旧的位置信息则将其擦除,始终保持位置信息存储器内的信息是最近的卫星定位结果。
LoRa通信模块4的工作流程包括以下步骤:
步骤S31)获取微处理器1处理以度分格式输出的车辆当前位置信息,跳转步骤S32;
步骤S32)位置信息打包、编码、解密,将车辆当前位置信息按照协议封装成数据帧并用ASE128加密算法加密处理,跳转步骤S33;
步骤S33)发出位置信息,将加密后数据帧发送出去,返回步骤S31。
微处理器1的工作流程包括以下步骤:
步骤S41)判断多模卫星导航接收芯片2对卫星信号是否接收正常,若是,跳转步骤S45,若否,跳转步骤S42;
步骤S42)获取位置信息存储单元3中的位置数据,从位置信息存储单元3中取出备用位置信息,跳转步骤S43;
步骤S43)判断INS模块5是否完成初始位置对准,初始位置对准是指将从位置信息存储单元3中取出的备用位置信息作为INS模块5积分运算的初始位置,若是,跳转S44,若否,跳转步骤S42;
步骤S44)获取INS模块5定位数据,得到INS模块5输出的第二位置信息,跳转步骤S45;
步骤S45)得到车辆当前位置信息,将获取的第一位置信息或第二位置信息处理得到度分格式的经纬度值,跳转步骤S46;
步骤S46)将获取的第一位置信息或第二位置信息处理得到度分格式的经纬度值输出给LoRa模块,同时更新位置信息存储单元3中的位置数据,将获取的第一位置信息处理得到的当前位置信息存入位置信息存储单元3并将存储单元中原有位置信息擦除。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。