测宽设备、测宽方法、存储有测宽程序的计算机可读介质
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及测量物体的两平行面宽度测量技术领域,具体涉及一种测宽设备、一种测宽方法、一种存储有测宽程序的计算机可读介质。
背景技术
在某些场合,需要精确测量物体的两平行表面之间的宽度。
专利文献CN109759458A公开了一种用于轧机推床的轧件测宽系统,包括设置在推床两侧的激光测距仪、设置在操作侧推头上的激光对准板、设置在传动侧推头上的激光对准板和PLC数据采集系统;激光测距仪通过测量激光对准板的位移数据得到操作侧推头和传动侧推头位移数据,并将测得的位移数据传输至PLC数据采集系统,PLC数据采集系统根据接收到的操作侧推头和传动侧推头位移数据,计算轧件宽度;操作侧推头和传动侧推头的位移数据包括初始传动侧推头位置、初始操作侧推头位置、抱住轧件时传动侧推头位置和抱住轧件时操作侧推头位置。在测量轧机推床的轧件宽度时,可以预估轧件的两平行表面分别贴合于推床两侧的导向轮,因此,设置在推床两侧的激光测距仪可以测得轧件的两平行表面的宽度。
但在某些场合,物体是随意放置的,使用前述的技术方案并不能测得物体的两平行表面之间的宽度。申请人检索后,未获得精确测量随意放置的物体的两平行表面之间宽度的现有技术。
发明内容
本发明的第一目的是提供一种测宽设备,以降低对被测宽物体的设置条件。
本发明的第二目的是提供一种测宽方法,以精确测量随意放置的物体的两平行表面之间的宽度。
本发明的第三目的是提供一种存储有测宽程序的计算机可读介质,以根据获取的随意放置的物体的两平行表面之间的宽度的测量数据获得该物体的两被测表面之间的宽度。
本发明是这样实现的:
一种测宽设备,用于测量物体的相互平行的第一表面和第二表面之间的宽度,它包括测厚装置和矫偏装置,所述测厚装置对应有第一测量面,所述第一测量面与所述第一表面的相交线为第一交线,所述第一测量面与所述第二表面的相交线为第二交线,所述测厚装置用于测量所述第一交线与所述第二交线的距离;所述矫偏装置对应有所述第一测量面、第二测量面,所述第二测量面平行于所述第一测量面,所述第二测量面与所述第一表面的相交线为第三交线,所述矫偏装置用于测量所述第一交线在所述第二测量面的投影线与所述第三交线的距离。
优选的,所述测厚装置包括第一相位波测距单元和第二相位波测距单元,所述第一相位波测距单元的测量波通路所在的平面、所述第二相位波测距单元的测量波通路所在的平面和所述第一测量面共面设置。
优选的,所述矫偏装置包括第一相位波测距单元和第三相位波测距单元,所述第一相位波测距单元的测量波通路所在的平面和所述第一测量面共面设置,所述第三相位波测距单元的测量波通路所在的平面和所述第二测量面共面设置。
优选的,所述测厚装置包括第一相位波测距单元和所述第二相位波测距单元,所述矫偏装置包括所述第一相位波测距单元和第三相位波测距单元,所述第一相位波测距单元、第二相位波测距单元和所述第三相位波测距单元中,任一相位波测距单元为电磁波测距仪、超声波测距仪或激光测距仪。
优选的,所述测厚装置包括第一三角波测距单元和所述第二三角波测距单元,所述第一三角波测距单元的测量波通路所在的平面、所述第二三角波测距单元的测量波通路所在的平面和所述第一测量面共面设置。
优选的,所述矫偏装置包括第一三角波测距单元和第三三角波测距单元,所述第一三角波测距单元的测量波通路所在的平面和所述第一测量面共面设置,所述第三三角波测距单元的测量波通路所在的平面和所述第二测量面共面设置。
优选的,所述测厚装置包括第一三角波测距单元和所述第二三角波测距单元,所述矫偏装置包括所述第一三角波测距单元和第三三角波测距单元,所述第一三角波测距单元、第二三角波测距单元和所述第三三角波测距单元中,任一三角波测距单元均包括测量光生成器、线阵型光接收器,所述测量光生成器输出的测量光束和所述线阵型光接收器的延伸线设置在其所对应的测量面内。
一种测宽方法,用于测量物体的相互平行的第一表面和第二表面之间的宽度,设第一测量面与所述第一表面的相交线为第一交线,所述第一测量面与所述第二表面的相交线为第二交线,设第二测量面与所述第一表面的相交线为第三交线,所述第一测量面平行于所述第二测量面;它包括以下步骤:
测量所述第一交线与所述第二交线的距离CE,测量所述第一交线在所述第二测量面的投影线与所述第三交线的距离OP;
则所述第一表面和所述第二表面之间宽度QH为
式中,CO为所述第一测量面与所述第二测量面的距离。
一种存储有测宽程序的计算机可读介质,所述测宽程序用于输出物体的相互平行的第一表面和第二表面之间的宽度,设第一测量面与所述第一表面的相交线为第一交线,所述第一测量面与所述第二表面的相交线为第二交线,设第二测量面与所述第一表面的相交线为第三交线,所述第一测量面平行于所述第二测量面;
所述测宽程序包括输入模块、计算模块和输出模块;
所述输入模块用于获取所述第一交线与所述第二交线的距离CE、所述第一交线在所述第二测量面的投影线与所述第三交线的距离OP;
所述计算模块用于计算
式中,CO为所述第一测量面与所述第二测量面的距离;
所述输出模块用于输出所述第一表面和所述第二表面之间的宽度QH。
前述的测宽设备的使用方法,用于测量设置在所述测宽设备的有效测量区域内的物体的宽度QH,所述有效测量区域为平面BR和平面DS,平面BR∥平面DS,物体的宽度QH对应于物体的第一表面与第二表面的距离;所述第一测量面与所述平面BR的相交线为第四交线,所述第一测量面与所述平面DS的相交线为第五交线,所述第二测量面与所述平面BR的相交线为第六交线,所述第一交线∥所述第四交线,包括以下步骤:
使用所述第一三角波测距单元获取所述第一交线和所述第四交线的距离BC;使用所述第二三角波测距单元获取所述第二交线和所述第五交线的距离DE;使用所述第三三角波测距单元获取所述第三交线和所述第六交线的距离PR;
则所述第一表面和所述第二表面之间宽度QH为
式中,CO为所述第一测量面与所述第二测量面的距离,BD为平面BR与平面DS之间的距离。
一种存储有测宽程序的计算机可读介质,用于测量设置在所述测宽设备的有效测量区域内的物体的宽度QH,所述有效测量区域为平面BR和平面DS,平面BR∥平面DS,物体的宽度QH对应于物体的第一表面与第二表面的距离;其特征在于,用于配合如权利要求7所述的测宽设备,所述第一测量面与所述平面BR的相交线为第四交线,所述第一测量面与所述平面DS的相交线为第五交线,所述第二测量面与所述平面BR的相交线为第六交线,所述第一交线∥所述第四交线,其特征在于,所述测宽程序包括输入模块、计算模块和输出模块;
所述输入模块用于获取所述第一交线和所述第四交线的距离BC、所述第二交线和所述第五交线的距离DE、所述第三交线和所述第六交线的距离PR;
所述计算模块用于计算
式中,CO为所述第一测量面与所述第二测量面的距离,BD为平面BR与平面DS之间的距离;
所述输出模块用于输出所述第一表面和所述第二表面之间的宽度QH。
本发明的有益效果包括:
1.本发明的测宽设备的构造可以用于测得物体的两平行表面之间的宽度的测量数据,它并不需要每一反射波测距单元发出的测量波垂直于被测宽物体的待测宽表面。
2.本发明的测宽方法可以精确测量随意放置的物体的两平行表面之间的宽度。
3.运行本发明的测宽程序,可以根据获取的随意放置的物体的两平行表面之间的宽度的测量数据获得该物体的两被测表面之间的宽度。
附图说明
图1为一种本发明的测宽方法的使用状态参考图之一。
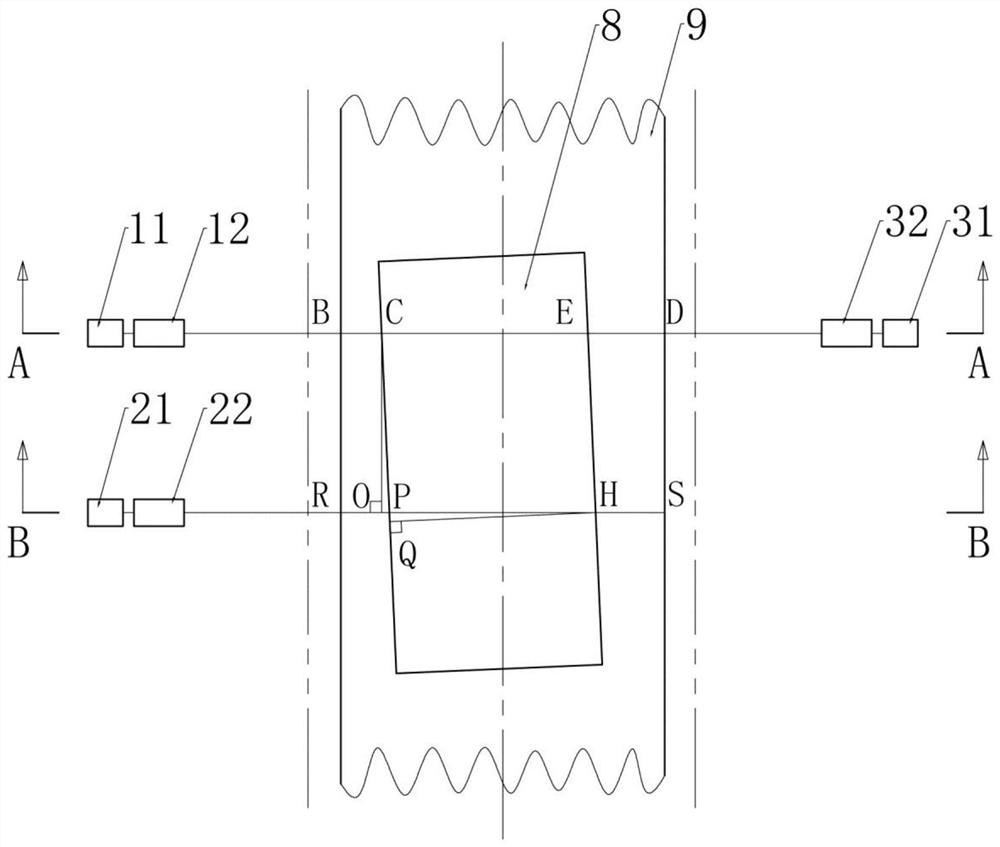
图2为一种本发明的测宽方法的使用状态参考图之二。
图3为图2的A-A的光线测量几何图。
图4为图2的B-B的光线测量几何图。
图5为计算三角波测距单元的模型参量的参考图。
附图标记说明:11-第一测量光生成器,12-第一光接收器,21-第三测量光生成器,22-第三光接收器,31-第二测量光生成器,32-第二光接收器,8-物体,9-支撑面。
具体实施方式
下面结合附图,以实施例的形式说明本发明,以辅助本技术领域的技术人员理解和实现本发明。除另有说明外,不应脱离本技术领域的技术知识背景理解以下的实施例及其中的技术术语。
实施例1:参见图2,本发明的测宽设备,用于测量物体8的相互平行的第一表面CP和第二表面EH之间的宽度,它包括测厚装置和矫偏装置。
其中,测厚装置对应有第一测量面BD,第一测量面BD与第一表面CP的相交线为第一交线,第一测量面BD与第二表面EH的相交线为第二交线,测厚装置用于测量所述第一交线与所述第二交线的距离CE。
参见图2,测厚装置包括第一相位波测距单元和第二相位波测距单元,第一相位波测距单元的测量波通路所在的平面、第二相位波测距单元的测量波通路所在的平面和第一测量面BD共面设置。
其中,矫偏装置对应有第一测量面BD、第二测量面RS,第二测量面RS平行于第一测量面BD,第二测量面RS与第一表面CP的相交线为第三交线,矫偏装置用于测量第一交线在第二测量面RS的投影线与第三交线的距离OP。
参见图2,矫偏装置包括第一相位波测距单元和第三相位波测距单元,第一相位波测距单元的测量波通路所在的平面和第一测量面BD共面设置,第三相位波测距单元的测量波通路所在的平面和第二测量面RS共面设置。
其中,第一相位波测距单元、第二相位波测距单元、第三相位波测距单元中,任一相位波测距单元都可以选择电磁波测距仪、超声波测距仪或激光测距仪。
对应于图2,前面两点确定的平面均为该两点所在的垂面确定的平面。
一般的,相位波测距单元中测量波发射器、反射波接收器会存在一定的夹角,故入射测量波和反射测量波能够确定一个平面,也就是测量波通路所在的平面。
实施例2:参见图2,一种测宽方法,用于测量物体8的相互平行的第一表面CP和第二表面EH之间的宽度,设第一测量面BD与第一表面CP的相交线为第一交线,第一测量面BD与第二表面EH的相交线为第二交线,设第二测量面RS与第一表面CP的相交线为第三交线,第一测量面BD平行于第二测量面RS;它包括以下步骤:
测量第一交线与第二交线的距离CE,测量第一交线在第二测量面RS的投影线与第三交线的距离OP;
则第一表面CP和第二表面EH之间宽度QH为
式中,CO为第一测量面BD与第二测量面RS的距离。
使用实施例1所述的测宽设备实现本测宽方法时,第一相位波测距单元与第一交线的第一距离是可测得的,第二相位波测距单元与第二交线的第二距离是可测得的,第一相位波测距单元与第二相位波测距单元的第三距离是确定且可测得的,则CE=第三距离-第一距离-第二距离。第三相位波测距单元与第三交线的第四距离是可测得的,则OP=|第四距离-第一距离|。
实施例3:参见图2,一种存储有测宽程序的计算机可读介质,测宽程序用于输出物体8的相互平行的第一表面CP和第二表面EH之间的宽度,设第一测量面BD与第一表面CP的相交线为第一交线,第一测量面BD与第二表面EH的相交线为第二交线,设第二测量面RS与第一表面CP的相交线为第三交线,第一测量面BD平行于第二测量面RS;
测宽程序包括输入模块、计算模块和输出模块;
输入模块用于获取第一交线与第二交线的距离CE、第一交线在第二测量面RS的投影线与第三交线的距离OP;
计算模块用于计算
式中,CO为第一测量面BD与第二测量面RS的距离;
所述输出模块用于输出第一表面CP和第二表面EH之间的宽度QH;
其中,第一测量面BD与第二测量面RS的距离CO可以内置于计算模块内,也可以由输入模块输入。
实施例4:参见图1-4,本发明的测宽设备,用于测量物体8的相互平行的第一表面CP和第二表面EH之间的宽度,它包括测厚装置和矫偏装置。
其中,测厚装置对应有第一测量面BD,第一测量面BD与第一表面CP的相交线为第一交线,第一测量面BD与第二表面EH的相交线为第二交线,测厚装置用于测量第一交线与第二交线的距离CE。
参见图2-3,测厚装置包括第一三角波测距单元和第二三角波测距单元,第一三角波测距单元的测量波通路所在的平面、第二三角波测距单元的测量波通路所在的平面和第一测量面BD共面设置。
其中,矫偏装置对应有第一测量面BD、第二测量面RS,第二测量面RS平行于第一测量面BD,第二测量面RS与第一表面CP的相交线为第三交线,矫偏装置用于测量第一交线在第二测量面RS的投影线与第三交线的距离OP。
参见图2、图4,矫偏装置包括第一三角波测距单元和第三三角波测距单元,第一三角波测距单元的测量波通路所在的平面和第一测量面BD共面设置,第三三角波测距单元的测量波通路所在的平面和第二测量面RS共面设置。
参见图2-4,在第一三角波测距单元、第二三角波测距单元和第三三角波测距单元中,任一三角波测距单元均包括测量光生成器、线阵型光接收器,测量光生成器输出的测量光束和线阵型光接收器的延伸线均设置在对应的测量面内。
第一三角波测距单元的线阵型光接收器所在的延伸线最好平行于第一交线设置。第二三角波测距单元的线阵型光接收器所在的延伸线最好平行于第二交线设置。第三三角波测距单元的线阵型光接收器所在的延伸线最好平行于第三交线设置。
实施例5:实施例4中的测宽设备的使用方法,参见图2-4,用于测量设置在测宽设备的有效测量区域内的物体的宽度QH,有效测量区域为平面BR和平面DS,有效测量区域指平面BR与平面DS之间的区域,对应于图2,也即是图2中的两条双点划线之间的区域,平面BR∥平面DS,物体的宽度QH对应于物体8的第一表面与第二表面的距离;第一测量面与平面BR的相交线为第四交线,第一测量面与平面DS的相交线为第五交线,第二测量面与平面BR的相交线为第六交线,第一交线∥第四交线,包括以下步骤:
使用第一三角波测距单元获取第一交线和第四交线的距离BC;使用第二三角波测距单元获取第二交线和第五交线的距离DE;使用第三三角波测距单元获取第三交线和第六交线的距离PR;
则第一表面和第二表面之间宽度QH为
式中,CO为所述第一测量面与所述第二测量面的距离,BD为平面BR与平面DS之间的距离。
具体的计算方法如下:
参见图2-3,在安装第一测量光生成器11与第一光接收器12时,使第一测量光生成器11输出的测量光照射在第一表面的平面后的反射光平行于第一光轴,使第一光接收器12的接收光轴与平行于第一光轴,使第一测量光生成器11与第一光接收器12的测量光通路所在的平面垂直于支撑面。在安装第二测量光生成器31与第二光接收器32时,使第二测量光生成器31输出的测量光照射在第二表面的平面后的反射光平行于第二光轴,使第二光接收器32的接收光轴与平行于第二光轴,使第二测量光生成器31与第二光接收器32的测量光通路所在的平面垂直于支撑面,且第一测量光生成器11与第一光接收器12的测量光通路所在的平面与第二测量光生成器31与第二光接收器32的测量光通路所在的平面共面。在安装第三测量光生成器21与第三光接收器22时,使第三测量光生成器21输出的测量光照射在第一表面的平面后的反射光平行于第三光轴,使第三光接收器22的接收光轴与平行于第三光轴,使第三测量光生成器21与第三光接收器22的测量光通路所在的平面垂直于支撑面,且第一测量光生成器11与第一光接收器12的测量光通路所在的平面平行于第三测量光生成器21与第三光接收器22的测量光通路所在的平面。
参见图2,设垂直于支撑面的平面BR和垂直于支撑面的平面DS之间的区域为本发明的测宽设备的有效测量区域,平面BR∥平面DS。在设置本发明的测宽设备时,第一平面⊥支撑面。由于第一表面平行于第二表面,故而CP∥EH,经C点垂直于直线RS的垂足为O,经H点垂直于第一表面的垂足为Q,得到以下几何等式:
进而得到:
且在本发明测宽设备中,CO的长度、BD的长度是确定的,在测宽设备安装后即可测得。
参见图5,三角波测距单元的原理是这样的:
光接收器包括一个凸透镜,凸透镜的光轴为直线OO′,凸透镜的光心为点O,凸透镜的经光心O且垂直于其光轴的平面为平面OI,平面OI与测量光KR的交点为J,凸透镜的焦点为点O′,令∠GJR=α,存在以下等式:
则:
同时还存在:
在选择光接收器后,OG′、OO′就可以确定,也可以测量获得。在设置好三角波测距单元后,OJ就可以确定,也可以测量获得。在确定测宽设备的有效测量区域后,R点、S点就可以确定,也可以测得RS长度、也可以获得R点处设置测量点时的KR′测量光路的测量光飞行时间,S点处设置测量点时的KS′测量光路的测量光飞行时间。在测量P点位置时,根据光接收器获取的P′在
根据式(9)及可以测得的参数,即可以求得物件的第一表面与第二表面的宽度QH。
实施例6:一种存储有测宽程序的计算机可读介质,用于测量设置在实施例4的测宽设备的有效测量区域内的物体的宽度QH,有效测量区域为平面BR和平面DS,平面BR∥平面DS,物体的宽度QH对应于物体的第一表面与第二表面的距离;第一测量面与平面BR的相交线为第四交线,第一测量面与平面DS的相交线为第五交线,第二测量面与平面BR的相交线为第六交线,第一交线∥第四交线。
其中,测宽程序包括输入模块、计算模块和输出模块;
输入模块用于获取第一交线和第四交线的距离BC、第二交线和第五交线的距离DE、第三交线和第六交线的距离PR;
计算模块用于计算
式中,CO为第一测量面与第二测量面的距离,BD为平面BR与平面DS之间的距离;
输出模块用于输出第一表面和第二表面之间的宽度QH。
上面结合附图和实施例对本发明作了详细的说明。应当明白,实践中无法穷尽说明所有可能的实施方式,在此通过举例说明的方式尽可能的阐述本发明的发明构思。在不脱离本发明的发明构思、且未付出创造性劳动的前提下,本技术领域的技术人员对上述实施例中的技术特征进行取舍组合、具体参数进行试验变更,或者利用本技术领域的现有技术对本发明已公开的技术手段进行常规替换形成的具体的实施例,均应属于为本发明隐含公开的内容。