拍摄机构及检测车
文献发布时间:2023-06-19 12:21:13
技术领域
本申请涉及隧道检测技术领域,尤其涉及一种拍摄机构及检测车。
背景技术
相关技术中,通常使用相机对物体进行拍摄,但是当物体移动时,或者相机本身发生移动时,拍摄的图像通常会产生拖影现象,难以获取高质量的图像。在一些应用场景下,拖影现象就需要进行避免,例如,在对隧道衬砌进行拍摄时,通常使用安装有相机的检测车对隧道衬砌进行拍摄,以便为后续的检测隧道衬砌渗漏提供依据。通用方案是相机固定在检测车上,拍摄时,相机的位置和方向是固定不可调整的。此时,由于检测车在行进,因此,被拍摄的区域处于相对运动的状态,拍摄到的图像有一定的拖影,进而影响检测时图像的分辨效果,并且在相机曝光时间长、帧率低、检测车行进速度快的情况下拖影现象会变得更严重。为了克服拖影现象,通常采用拍照速率更快的相机,或采用帧率较高的线阵相机进行拍摄。但是,在用远红外热成像仪检测隧道衬砌渗漏时,难以找到符合要求的远红外相机或远红外线阵相机。
发明内容
本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种拍摄机构及检测车,通过设置有拍摄相机、驱动机构和触发装置,可以显著降低拍摄图像的拖影现象。
根据本申请的第一方面实施例的拍摄机构,包括:
拍摄相机,所述拍摄相机用于可旋转地设置在检测车本体上;
驱动机构,所述驱动机构包括驱动轮和驱动组件,所述驱动轮和所述驱动组件用于活动设置于所述检测车本体上;所述驱动轮与所述驱动组件摆动连接,所述拍摄相机与所述驱动组件联动连接;
触发装置,所述触发装置与所述拍摄相机电连接,所述触发装置用于根据所述驱动轮的预设旋转角度发送拍摄信号;所述拍摄相机还用于旋转至预设角度后接收所述拍摄信号以进行拍摄。
根据本申请实施例的拍摄机构,至少具有如下有益效果:通过在检测车上设置可旋转的拍摄相机,以及驱动机构,其中,驱动机构包括驱动轮和驱动组件,并且还设置触发装置,触发装置与拍摄相机电连接;当进行拍摄区域的拍摄时,由于检测车在预设的移动方向上移动,拍摄区域就会相对于移动方向往相反方向移动,此时,驱动轮驱动驱动组件摆动,从而带动拍摄相机旋转,当驱动轮旋转至预设旋转角度时,触发装置就会产生拍摄信号,当拍摄相机接收到拍摄信号后,此时,拍摄相机的镜头已经旋转到预设角度并对拍摄区域进行拍照。因此,本申请的拍摄机构,能够在拍摄区域移动的时候使摄像机对拍摄区域进行跟踪,使得拍摄相机对准拍摄区域进行拍摄,显著降低了拍摄图像的拖影现象。
根据本申请的一些实施例,所述拍摄相机和所述驱动机构均设置为两个,所述拍摄机构还包括安装板,所述安装板固定设置在所述检测车本体上,两个所述拍摄相机分别可旋转地设置在所述安装板的两侧;两个所述驱动轮之间通过转轴与所述安装板可转动连接;两个所述驱动轮远离所述安装板的端面均设置有第一凸块;两个所述驱动组件的一端分别套设在对应的所述第一凸块上,两个所述驱动组件的另一端分别活动连接一个所述拍摄相机,以使所述驱动组件的一端跟随所述驱动轮转动时,所述驱动组件的另一端驱动拍摄相机旋转,两个所述触发装置分别设置在所述安装板的两侧。
根据本申请的一些实施例,每一所述驱动组件均包括第一驱动条和第二驱动条,所述第一驱动条的一端与对应的所述第一凸块活动连接,所述第一驱动条的另一端设置有第一锯齿部,所述第二驱动条的一端设置有第二锯齿部,所述第一驱动条的另一端和所述第二驱动条的一端之间通过所述第一锯齿部和所述第二锯齿部咬合连接,所述第二驱动条的另一端与所述拍摄相机活动连接。
根据本申请的一些实施例,所述触发装置为接近开关传感器,所述接近开关传感器包括传感器本体、反光条和固定触点,所述反光条设置在所述驱动轮侧壁上,所述固定触点设置在所述安装板的一侧且靠近所述驱动轮,所述固定触点与所述传感器本体连接,所述传感器本体用于根据所述固定触点发出光线并根据所述固定触点接收所述反光条反射的所述光线来发送所述拍摄信号。
根据本申请的一些实施例,所述安装板还设置有凸台,所述凸台上设置有第一安装块,所述第一驱动条的另一端设置有定位孔,所述第一安装块穿设于所述定位孔。
根据本申请的一些实施例,所述第一驱动条的一端设置有第一条形通孔,所述第一凸块穿设于所述第一条形通孔并与所述第一条形通孔滑动连接。
根据本申请的一些实施例,两个所述第一凸块分别沿两个所述驱动轮的径向相对设置,两个所述驱动轮通过两个所述第一凸块使两个所述拍摄相机做反向运动。
根据本申请的一些实施例,所述第二驱动条的另一端设置有第二凸块,所述拍摄相机的一端设置有调节块,所述调节块设置有第二条形通孔,所述第二凸块穿设于所述第二条形通孔并与所述第二条形通孔滑动连接。
根据本申请的一些实施例,所述调节块可伸缩地设置在所述拍摄相机的一端。
根据本申请的第二方面实施例的检测车,包括:
检测车本体;
如第一方面实施例所述的拍摄机构,所述拍摄相机可旋转地设置在所述检测车本体上,所述驱动轮和所述驱动组件均活动设置于所述检测车本体上。
根据本申请实施例的检测车,至少具有如下有益效果:通过采用第一方面实施例所述的拍摄机构,能够在隧道衬砌的拍摄区域移动的时候使摄像机对隧道衬砌的拍摄区域进行跟踪,使得拍摄相机对准拍摄区域进行拍摄,显著降低了拍摄图像的拖影现象。
本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
附图说明
下面结合附图和实施例对本申请做进一步的说明,其中:
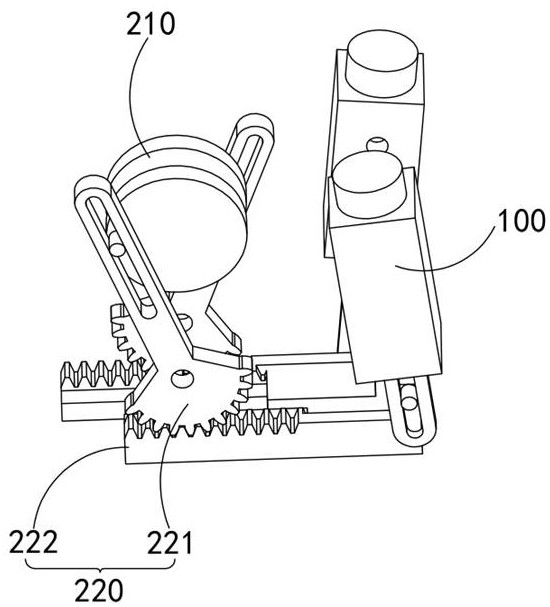
图1为本申请一个实施例所提供的拍摄机构的结构示意图;
图2为图1中所示的安装板的结构示意图;
图3为图1中所示的驱动机构的结构示意图;
图4为图3中所示的第一驱动条的结构示意图;
图5为图3中所示的第二驱动条的结构示意图;
图6为图3中所示的第二驱动条的另一结构示意图;
图7为图1中所示的驱动轮的结构示意图;
图8为图1中所示的拍摄机构的局部结构示意图;
图9为图1中所示的拍摄相机的结构示意图。
附图标记:
拍摄相机100、调节块110、第二条形通孔120、连接孔130、驱动机构200、驱动轮210、第一凸块211、转轴212、驱动组件220、第一驱动条221、第一锯齿部2211、第一条形通孔2212、定位孔2213、驱动杆2214、第二驱动条222、第二锯齿部2221、凸出部2222、第二凸块2223、第三凸块2224、安装板300、第一安装块310、凸台320、凹槽330、安装孔340、第二安装块350、反光条410、固定触点420。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本申请,而不能理解为对本申请的限制。
在本申请的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
在本申请的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本申请的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本申请中的具体含义。
本申请的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
下面参照图1描述根据本申请实施例的拍摄机构。
可以理解的是,如图1所示,根据本申请实施例的拍摄机构,包括:
拍摄相机100,拍摄相机100用于可旋转地设置在检测车本体上;
驱动机构200,驱动机构200包括驱动轮210和驱动组件220,驱动轮210和驱动组件220用于活动设置于检测车本体上;驱动轮210与驱动组件220摆动连接,拍摄相机100与驱动组件220联动连接;
触发装置,触发装置与拍摄相机100电连接,触发装置用于根据驱动轮210的预设旋转角度发送拍摄信号;拍摄相机100还用于旋转至预设角度后接收拍摄信号以进行拍摄。
工作原理:如图1所示,当检测车在预设的移动方向上移动时,拍摄区域往移动方向的后方移动,驱动轮210驱动驱动组件220摆动,使驱动组件220带动拍摄相机100旋转,同时驱动轮210到达预设旋转角度时触发触发装置,使触发装置产生拍摄信号,进而使拍摄相机100转动至预设角度时,拍摄相机100对准相对拍摄相机100静止的拍摄区域拍照。
通过在检测车上设置可旋转的拍摄相机100,以及驱动机构200,其中,驱动机构200包括驱动轮210和驱动组件220,并且在检测车上还设置有触发装置,触发装置与拍摄相机100电连接;当进行拍摄区域的拍摄时,由于检测车在预设的移动方向上移动,拍摄区域就会相对于移动方向往后移动,此时,驱动轮210通过旋转进而驱动驱动组件220摆动,从而带动拍摄相机100旋转,当驱动轮210旋转至预设旋转角度时,触发装置就会产生拍摄信号,当拍摄相机100接收到拍摄信号时,此时,拍摄相机100的镜头已经旋转到预设角度并对拍摄区域进行拍照。因此,本申请的拍摄机构,能够在拍摄区域移动的时候使摄像机对拍摄区域进行跟踪,使得拍摄相机100对准拍摄区域进行拍摄,显著降低了拍摄图像的拖影现象,并且不需采用远红外相机或远红外线阵相机也可以实现,有效降低了制作成本。
可以理解的是,拍摄相机100可旋转地安装在检测车的侧面,驱动机构200也设置在检测车的侧面。当检测车从隧道的一个底部区域行驶到另一个底部区域时,检测车顶部以及侧面的拍摄区域就会相对于检测车的移动方向往相反方向移动。此时,通过驱动机构200驱动拍摄相机100旋转跟踪拍摄区域,并且当拍摄相机100拍照时,使拍摄区域相对于拍摄相机100的镜头处于静止状态,就可以就解决拍摄图像的拖影问题。
可以理解的是,如图1所示,在本申请的一些实施例中,还设有控制系统,控制系统用于接收触发装置产生的拍摄信号,并根据拍摄信号向拍摄相机100发出拍摄信号。当检测车移动时,驱动轮210通过旋转驱动驱动组件220并带动拍摄相机100旋转,且当驱动轮210至预设旋转角度时,就会使触发装置产生拍摄信号,拍摄信号发送至控制系统,控制系统经过延时处理使拍摄相机100旋转至预设旋转角度时对相对静止的拍摄区域拍摄一次照片。
可以理解的是,在本申请的一些实施例中,拍摄区域设置为隧道衬砌的拍摄区域。当检测车在隧道衬砌底部行驶时,隧道衬砌的拍摄区域就会相对于检测车往后移动,此时,通过旋转拍摄相机100并使拍摄相机100相对于隧道衬砌的拍摄区域处于静止状态,然后再进行拍照,可以有效解决图像的拖影问题。
可以理解的是,拍摄相机的预设角度根据隧道衬砌的高度进行调节。具体地,可以预先测量出隧道衬砌表面到拍摄相机100的直线距离,之后就可以根据直线距离进行预设角度调节,灵活方便,适用范围广。
可以理解的是,拍摄相机100为面阵相机。采用面阵相机能简化测试系统组成,降低成本。
可以理解的是,可以采用检测车的行进机构与驱动轮210联动的方式,使驱动轮210驱动驱动组件220并带动拍摄相机100旋转。此设置可使拍摄相机100的旋转速度与检测车的的行进速度同步,使得拍摄隧道衬砌的拍摄区域更为方便。
可以理解的是,如图1、图2和图7所示,拍摄相机100和驱动机构200均设置为两个,拍摄机构还包括安装板300,安装板300固定设置在检测车本体上,两个拍摄相机100分别可旋转地设置在安装板300的两侧;两个驱动轮210之间通过转轴212与安装板300可转动连接;两个驱动轮210远离安装板300的端面均设置有第一凸块211;两个驱动组件220的一端分别套设在对应的第一凸块211上,两个驱动组件220的另一端分别活动连接一个拍摄相机100,以使驱动组件220的一端跟随驱动轮210转动时,驱动组件220的另一端驱动拍摄相机100旋转,两个触发装置分别设置在安装板300的两侧。
通过设置安装板300,并且安装板300两侧均设置有拍摄相机100,能够同时拍摄更多隧道衬砌的照片,节省操作步骤。
可以理解的是,安装板300设置在检测车的顶部,两个拍摄相机100可旋转地分别设置在安装板300的两侧,驱动机构200也设置在检测车的顶部,且驱动轮210通过转轴212与安装板300可转动连接,两个驱动组件220分别活动设置在安装板300的两侧,每一驱动组件220的一端与驱动轮210连接,每一驱动组件220的另一端与拍摄相机100连接。此时,拍摄机构设置在检测车的顶部,可以获得更加宽广的视野,拍摄更多区域的隧道衬砌图像。
可以理解的是,如图3、图4和图5所示,每一驱动组件220均包括第一驱动条221和第二驱动条222,第一驱动条221的一端与对应的第一凸块211活动连接,第一驱动条221的另一端设置有第一锯齿部2211,第二驱动条222的一端设置有第二锯齿部2221,第一驱动条221的另一端和第二驱动条222的一端之间通过第一锯齿部2211和第二锯齿部2221咬合连接,第二驱动条222的另一端与拍摄相机100活动连接。
通过设置第一锯齿部2211和第二锯齿部2221,且第一锯齿部2211和第二锯齿部2221咬合连接,当驱动轮210驱动第一驱动条221转动时,能够带动第二驱动条222来回往返运动,结构简单,易于实施。
可以理解的是,如图4所示,第一驱动条221的另一端为扇形,第一锯齿部2211设置在第一驱动条221的另一端的端面上。扇形的设置,更利于第一驱动条221带动第二驱动条222来回往返运动。
可以理解的是,如图5所示,第二锯齿部2221为矩形。矩形的设置,能够更好的与第一驱动条221进行配合,使得移动更加方便。
可以理解的是,如图8所示,触发装置为接近开关传感器,接近开关传感器包括传感器本体、反光条410和固定触点420,反光条410设置在驱动轮210侧壁上,固定触点420设置在安装板300的一侧且靠近驱动轮210,固定触点420与传感器本体连接,传感器本体用于根据固定触点420发出光线并根据固定触点420接收反光条410反射的光线来发送拍摄信号。
通过接近开关传感器的设置,使得驱动轮210每一个旋转周期都会在预设旋转角度触发接近开关传感器,使得接近开关传感器产生拍摄信号,通过硬件的设置,避免了通过软件程序实施较为复杂的控制方法,使得拍摄时不容易出现错误,稳定性强。
可以理解的是,接近开关传感器为非接触式接近开关传感器。
可以理解的是,反光条410替换为移动触点,接近开关传感器为接触式接近开关传感器用于用于根据移动触点与固定触点420接触时发送拍摄信号。
可以理解的是,预设旋转角度设置为360度。通过360度的设置,使得驱动轮210每一个旋转周期都会在预设旋转角度触发接近开关传感器。
可以理解的是,如图4所示,第一驱动条221的一端设置有第一条形通孔2212,每一第一凸块211穿设于第一条形通孔2212并与第一条形通孔2212滑动连接。
通过第一条形通孔2212和第一凸块211的设置,使得驱动轮210在驱动第一驱动条221转动时,能够很好的驱动第一驱动条221旋转,方案简单,不需设计复杂结构,易于实施。
可以理解的是,如图2和图4所示,安装板300还设置有凸台320,凸台320上设置有第一安装块310,第一驱动条221的另一端设置有定位孔2213,第一安装块310穿设于定位孔2213。通过第一安装块310的设置,使得第一驱动条221安装更加方便。为了提高第一驱动条221的灵活性,可以在安装板300的侧面设置凸台320,且第一安装块310设置在凸台320上,此时,第一驱动条221可以获得更好的灵活性。
可以理解的是,如图4所示,第一驱动条221还设置有驱动杆2214,驱动杆2214和第一锯齿部2211的连接位置设置定位孔2213,螺钉穿设于定位孔2213使第一驱动条221可转动地安装在安装板300的侧面。拆装方便,操作方便。进一步地,第一驱动条221为一体成型结构,制作更加方便,也可以减少更多零部件的安装。
可以理解的是,如图7所示,两个第一凸块211分别沿两个驱动轮210的径向相对设置,两个驱动轮210通过两个第一凸块211使两个拍摄相机100做反向运动。
通过设置两个第一凸块211,且两个第一凸块211分别在两个驱动轮210的侧面相对设置,并进一步的使两个第一凸块211以两个驱动轮210的中心为起点呈相反方向等距设置,能够使得驱动轮210通过第一凸块211驱动第一驱动条221和第二驱动条222,并进一步带动拍摄相机100旋转时,能够使得两个拍摄相机100呈相反方向运动,即因而能够拍摄更多的隧道衬砌的图像,有利于提高检测效果,保证检测质量。
可以理解的是,如图7所示,两个第一凸块211呈相对设置并以两个驱动轮210的中心为起点等距错开,且第一凸块211均位于驱动轮210的边沿,此设置能够使得拍摄相机100的旋转幅度更大,获得更广的旋转视角。
可以理解的是,两个第一凸块211呈相对设置,且两个第一凸块211的中心重合,并进一步地分别设置在两个驱动轮210的边沿,此方式使得两个拍摄相机100同步运动,也可以获得更多的隧道衬砌的拍摄图像。
可以理解的是,如图7所示,两个驱动轮210的中心通过转轴212固定连接,中心重合,能够使得驱动轮210驱动更加方便。
可以理解的是,如图5和图9所示,第二驱动条222的另一端设置有第二凸块2223,拍摄相机100的一端设置有调节块110,调节块110设置有第二条形通孔120,第二凸块2223穿设于第二条形通孔120并与第二条形通孔120滑动连接。
通过第二凸块2223的设置,并且进一步设置调节块110,能够很好的对拍摄相机100进行旋转,使用方便。
可以理解的是,第二驱动条222的一端还设置有凸出部2222,凸出部2222设置有第二凸块2223。凸出部2222的设置,可使拍摄相机100的旋转更加灵活。
可以理解的是,如图6所示,第二驱动条222的两端均设置有凸出部2222和第二凸块2223,具有防呆功能,当两个第二驱动条222分别安装在安装板300的两侧的时候,不需要进行选择,任意选取其中一个第二驱动条222安装在安装板300的一侧就可以进行安装。
可以理解的是,如图2和图5所示,第二驱动条222的一侧设置有第三凸块2224,安装板300的底部一侧设置有凹槽330,第三凸块2224设置在凹槽330内并与凹槽330滑动连接。
通过凹槽330和第三凸块2224的设置,能够使得第二驱动条222滑动设置在安装板300的底部一侧,使得第二驱动条222便于带动拍摄相机100旋转。
可以理解的是,如图9所示,调节块110可伸缩地设置在拍摄相机100的一端,调节块110用于调节拍摄相机100的旋转的预设角度。
通过调节块110的可伸缩设置,可以手动调节调节块110的伸缩位置,可使得调节拍摄相机100的的旋转的预设角度时更加方便,预设角度为预先设置的拍摄相机100可旋转的角度。
如图2和图7所示,安装板300还设置有安装孔340,转轴212穿设于安装孔340。
可以理解的是,如图2和图9所示,安装板300还设置有第二安装块350,拍摄相机100上设置有连接孔130,第二安装块350设置在连接孔130并与连接孔130活动连接。通过此设置,使得拍摄相机100能够很方便的进行旋转,并且安装方便。
可以理解的是,接近开关传感器也可以设置在第二驱动条222的一侧,当第二驱动条222靠近接近开关传感器时,也可以产生拍摄相机100的拍摄信号。
可以理解的是,接近开关传感器还可以设置在第二驱动条222两端中的任意一端附近,当第二驱动条222靠近接近开关传感器时,也可以产生拍摄相机100的拍摄信号。
下面参照图1描述根据本申请实施例的检测车。
可以理解的是,如图1所示,根据本申请实施例的检测车,包括:
检测车本体;
如上述实施例的拍摄机构,拍摄机构安装在检测车本体上,拍摄相机100可旋转地设置在检测车本体上,驱动轮210和驱动组件220均活动设置于检测车本体上。
通过采用上述实施例的拍摄机构,能够在隧道衬砌的拍摄区域移动的时候使摄像机对隧道衬砌的拍摄区域进行跟踪,使得拍摄相机100对准拍摄区域进行拍摄,显著降低了拍摄图像的拖影现象,并且不需采用远红外相机或远红外线阵相机也可以实现,有效降低了制作成本。
下面描述根据本申请实施例的拍摄机构的具体实施案例。
在某一隧道衬砌的应用场景中,假设:
隧道衬砌表面离拍摄相机100的距离为:3米。
检测车的行进速度为:6米每秒。
每帧图像在前后方向上覆盖隧道衬砌的距离为:1.57米。
就可以计算出拍摄相机100的摆动角速度,因驱动轮210与检测车的行进机构联动,摆动角速度=行进角速度=6米每秒÷3米÷圆周率×180度= 6÷3÷3.14×180= 115度每秒,其中,圆周率取3.14,结果采用四舍五入。
后面就可以计算出每次拍一帧图像所覆盖的角度,即:
1.57米÷3米÷3.14×180度=30度,即每次拍一帧图像覆盖30度。
对应此角速度,将拍摄相机100的旋转角度设置为30度时,即每次摆动角度30度时,每秒需摆动115÷30=4次,每摆动一次触发一次拍照。
如果拍摄相机100每次摆动角度60度,每秒需摆动115÷60=2次,每摆动一次触发2次拍照。
上面结合附图对本申请实施例作了详细说明,但是本申请不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本申请宗旨的前提下作出各种变化。此外,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。