一种基于多源信息熵差异性的数据降维方法及装置
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及汽车技术领域,尤其涉及一种基于多源信息熵差异性的数据降维方法及装置。
背景技术
环境感知技术是智能汽车的关键技术之一,是智能汽车实现自主决策、路径规划等功能的基础。智能驾驶汽车环境感知系统常用的传感器包括激光雷达、摄像头、毫米波雷达及超声波雷达等。每种传感器适用场景和作用范围不同,多传感器融合可实现感知数据上的互补,如激光雷达可生成大范围的高精度三维环境的点云,但其点云数据比较稀疏且无法应用于雨雪雾等恶劣天气,毫米波和超声波雷达可弥补这一缺点但相应的作用范围较短,精度较低。因此智能汽车环境感知系统需充分调用多个传感器,对多个传感器的数据进行合理分配和使用,把在时间或者空间上冗杂的信息进行精简或者将互补的信息按照某种准则进行组合,从而得到被测对象的一致性解释,输出最终可靠的外界环境描述,进而提高决策系统的准确性。
使用多个传感器会使得待处理的信息数据维度剧增、处理效率降低且信息中会有大量冗杂或矛盾的信息。
发明内容
本发明所要解决的技术问题在于,提供一种基于多源信息熵差异性的数据降维方法及装置,降低多个传感器获取信息数据的维度,提升处理效率并删除冗杂或矛盾的信息。
本发明提供的一种基于多源信息熵差异性的数据降维方法,所述方法包括:
在从每一车辆的多个传感器同一时刻获取的数据中提取特征数据集合,所述特征数据集合包括每一车辆的特征数据样本,每一特征数据样本包括多个特征矩阵,每一特征矩阵包括多个特征向量。
在每一车辆的所述特征数据样本的多个特征矩阵中,统计每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率;
根据所述每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率,计算所述每一特征向量所属特征矩阵的信息熵;
根据每一车辆的同一特征矩阵的信息熵,计算所述特征矩阵的信息熵集合的均值;
根据所述特征矩阵的信息熵集合的均值、所述每一车辆的同一特征矩阵的信息熵集合计算所述特征矩阵的信息熵集合的方差;
比较所述特征矩阵的信息熵集合的方差和预设特征阈值;
当所述特征矩阵的信息熵集合的方差小于所述预设特征阈值时,删除所述每一车辆的所述特征矩阵,形成降维的每一特征数据样本。
进一步地,所述特征数据集合为X={x
进一步地,根据所述每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率,计算所述每一特征向量所属特征矩阵的信息熵的计算公式具体为:
其中,所述每一特征矩阵
进一步地,根据每一车辆的同一特征矩阵的信息熵,计算所述特征矩阵的信息熵集合的均值的步骤通过下述公式:
其中,
进一步地,根据所述特征矩阵的信息熵集合的均值、所述每一车辆的同一特征矩阵的信息熵集合计算所述特征矩阵的信息熵集合的方差的步骤具体采用下述公式来计算所述特征矩阵的信息熵集合的方差:
其中,
进一步地,比较所述特征矩阵的信息熵集合的方差和预设特征阈值之前还包括如下步骤:
利用所述多个传感器获取天气信息、时间信息和工况信息;
根据所述天气信息、时间信息和工况信息,选取与所述天气信息和工况信息对应的预设特征阈值。
进一步地,所述方法还包括如下步骤:
当所述特征矩阵的信息熵集合的方差大于或等于所述预设特征阈值时,保留所述每一车辆的所述特征矩阵。
本发明提供的一种适用于车辆传感器信号的滤波装置,所述装置包括:
第一获取单元,用于从每一车辆的多个传感器同一时刻获取的数据提取特征数据集合,所述特征数据集合包括每一车辆的特征数据样本,每一特征数据样本包括多个特征矩阵,每一特征矩阵包括多个特征向量;
统计单元,用于在每一车辆的所述特征数据样本的多个特征矩阵中,统计每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率;
第一计算单元,用于根据所述每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率,计算所述每一特征向量所属特征矩阵的信息熵;
第二计算单元,用于根据每一车辆的同一特征矩阵的信息熵,计算所述特征矩阵的信息熵集合的均值;
第三计算单元,用于根据所述特征矩阵的信息熵集合的均值、所述每一车辆的同一特征矩阵的信息熵集合计算所述特征矩阵的信息熵集合的方差;
运算单元,用于比较所述特征矩阵的信息熵集合的方差和预设特征阈值;
处理单元,用于当所述特征矩阵的信息熵集合的方差小于所述预设特征阈值时,删除所述每一车辆的所述特征矩阵,形成降维的每一特征数据样本。
进一步地,所述装置还包括:
第二获取单元,利用所述多个传感器获取天气信息和工况信息;
选择单元,用于根据所述天气信息和工况信息,选取与所述天气信息和工况信息对应的预设特征阈值。
进一步地,所述处理单元还用于当所述特征矩阵的信息熵集合的方差大于或等于所述预设特征阈值时,保留所述每一车辆的所述特征矩阵。
实施本发明,具有如下有益效果:
通过本发明,计算特征矩阵的信息熵,并且根据信息熵的均值和信息熵求取均值,通过均值与预设阈值进行大小比较,挑选出均值大于预设阈值保留,将均值小于或等于预设阈值删除,即保留数据中区别较大的特征,又将无用的冗余数据删除;解决了现有的问题待处理的信息数据维度剧增、处理效率降低且信息中有大量冗杂或矛盾的信息。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
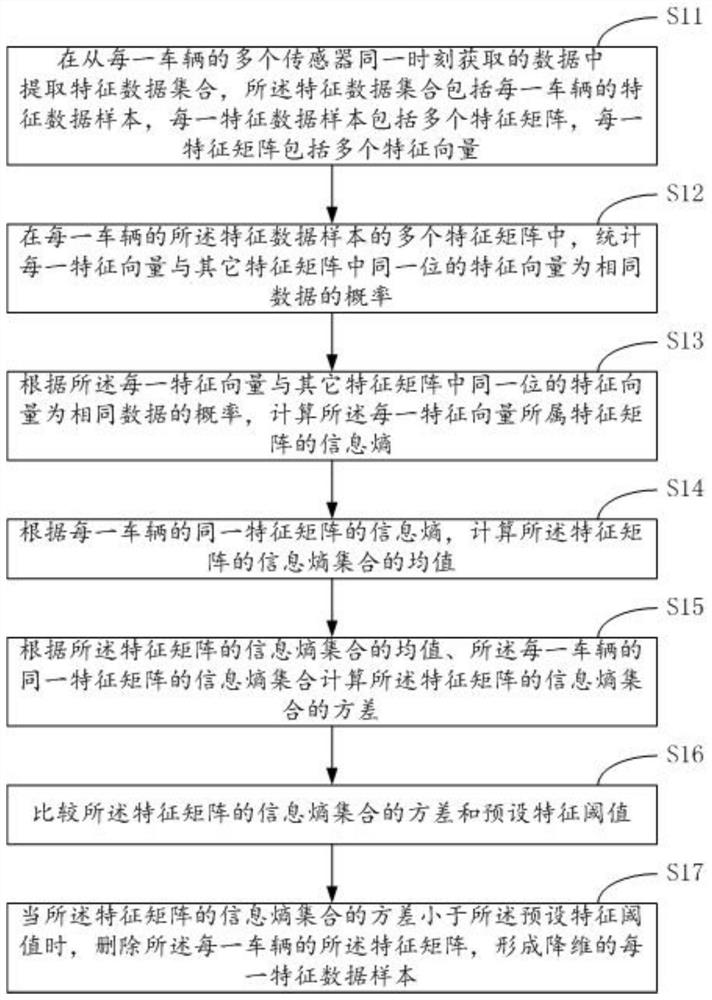
图1是本发明实施例提供的基于多源信息熵差异性的数据降维方法的流程图。
图2是本发明实施例提供的基于多源信息熵差异性的数据降维方法的具体案例运算流程图。
图3是本发明实施例提供的基于多源信息熵差异性的数据降维装置的结构图。
具体实施方式
本专利核心内容为通过运算挑选出多维数据中的冗余数据删除,并保留原有数据的特征,以下结合附图和实施例对该具体实施方式做进一步说明。
下面将详细描述本发明提供的基于多源信息熵差异性的数据降维方法及装置的实施例。
如图1所示,本发明实施例提供了基于多源信息熵差异性的数据降维方法,所述方法包括:
步骤S11、在从每一车辆的多个传感器同一时刻获取的数据中提取特征数据集合,所述特征数据集合包括每一车辆的特征数据样本,每一特征数据样本包括多个特征矩阵,每一特征矩阵包括多个特征向量。
具体地,所述特征数据集合为X={x
需要说明的是,在无人驾驶车辆的环境感知系统中,需采集相机、激光雷达、毫米波雷达等多个传感器的数据;特征数据集合X={x
步骤S12、在每一车辆的所述特征数据样本的多个特征矩阵,统计每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率。
需要说明的是,假定每辆车上有8个传感器,需要统计每一特征向量
步骤S13、根据所述每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率,计算所述每一特征向量所属特征矩阵的信息熵。
具体地,实现步骤S13的公式具体为
需要说明的是,信息熵是用来衡量一个随机变量出现的期望值,代表了排除冗余后的平均信息量。当信息熵用于特征时,如果一个特征的信息熵越大,说明其能提供更多的信息;反之如果一个特征的信息熵越小,说明其能提供的信息有限。
步骤S14、根据每一车辆的同一特征矩阵的信息熵,计算所述特征矩阵的信息熵集合的均值。
具体地,实现步骤S14公式具体为
步骤S15、根据所述特征矩阵的信息熵集合的均值、所述每一车辆的同一特征矩阵的信息熵集合计算所述特征矩阵的信息熵集合的方差。
具体地,实现步骤S15公式具体为
需要说明的是,方差可用来衡量一组数据的离散程度,方差越大表明特征在样本间的差异性越大,方差大的特征可直接区分样本空间。
步骤S16、比较所述特征矩阵的信息熵集合的方差和预设特征阈值。
需要说明的是,由于方差代表的是数据的平均波动程度,避免了比较绝对差对数据大小敏感的缺点,故只需在所有样本间设置一个固定的阈值就可以区分所有特征。阈值的大小决定了特征选取的数量和质量,因而需要通过反复实验的方法选取一个合理的预设特征阈值。
进一步需要说明的是,实际驾驶场景中存在着复杂多样的天气(晴天、雨天、雪天等)、时间(日间、夜间等)和工况(市区普通道路、环路、高速路等),而不同的传感器对于不同的天气和工况表现出不同的效果和特点,比如激光雷达探测距离较远、能获取大范围内物体的高精度三维信息,但无法应用于雨雪雾等恶劣天气;毫米波雷达和超声波雷达对恶劣天气的适用能力更强,却存在探测距离近、精度较低等缺点;而摄像头虽然具有较高的分辨率但受环境光的限制比较大。因此为获取足够有效的信息,在不同场景下对不同的传感器需具有不同的置信度。在天气良好的日间,由于摄像头的成像信息更加丰富,更有利于进行各类识别分类,因此具有更高的置信度;在夜间进行驾驶时,黑暗的环境限制了摄像头的应用,但激光雷达却不易受光线条件的影响,仍表现出不错的效果,所以激光雷达在夜间能提供更为有效的信息;而在雨雪雾等恶劣天气下,由于毫米波雷达穿透烟雾的能力更强,其置信度会相对更高。因此在不同的驾驶场景下,分类算法对于不同传感器数据的依赖性存在显著不同。基于上述特点,本发明在不同驾驶场景下进行大量的实验和参数调校,从而针对不同天气、不同时间和不同工况调校出相应的最优预设特征阈值,车辆可以根据实时获取的天气信息、时间信息和工况信息选择对应的预设特征阈值。
进一步地,所述步骤S16之前还包括:
利用所述多个传感器获取天气信息、时间信息和工况信息;
根据所述天气信息、时间信息和工况信息,选取与所述天气信息、时间信息和工况信息对应的预设特征阈值。
步骤S17、当所述特征矩阵的信息熵集合的方差小于所述预设特征阈值时,删除所述每一车辆的所述特征矩阵,形成降维的每一特征数据样本。
需要说明的是,方差衡量的是特征对样本分类的重要程度,通过设置合理的阈值,并将不同场景下的特征信息熵方差与相应的阈值进行比较,可以筛选出差异性大的特征子集,实现特征的有效降维。如果特征信息熵方差大于阈值,说明该特征在各样本间差异性较大,可以较好的区分各类样本则保留该特征。如果特征信息熵方差小于阈值,说明该特征不能有效的分类样本则舍弃该特征。
进一步地,所述方法还包括:
当所述特征矩阵的信息熵集合的方差大于或等于所述预设特征阈值时,保留所述每一车辆的所述特征矩阵。
如图2所示,本发明实施例提供了基于多源信息熵差异性的数据降维方法的具体案例,获取到了包括多个样本的特征数据集合,计算得到信息熵如图中所示,然后针对信息熵集合计算平均值,基于信息熵和信息熵的均值计算信息熵集合的方差,比较方差与预设阈值,筛选出方差较大的特征,其余方差较小的特征被删除,达到了降低数据维度的效果。
如图3所示,本发明实施例提供了基于多源信息熵差异性的数据降维装置,所述装置包括:
第一获取单元31,用于从每一车辆的多个传感器同一时刻获取的数据提取特征数据集合,所述特征数据集合包括每一车辆的特征数据样本,每一特征数据样本包括多个特征矩阵,每一特征矩阵包括多个特征向量;
统计单元32,用于在每一车辆的所述特征数据样本的多个特征矩阵中,统计每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率;
第一计算单元33,用于根据所述每一特征向量与其它特征矩阵中同一位的特征向量为相同数据的概率,计算所述每一特征向量所属特征矩阵的信息熵;
第二计算单元34,用于根据每一车辆的同一特征矩阵的信息熵,计算所述特征矩阵的信息熵集合的均值;
第三计算单元35,用于根据所述特征矩阵的信息熵集合的均值、所述每一车辆的同一特征矩阵的信息熵集合计算所述特征矩阵的信息熵集合的方差;
运算单元36,用于比较所述特征矩阵的信息熵集合的方差和预设特征阈值;
处理单元37,用于当所述特征矩阵的信息熵集合的方差小于所述预设特征阈值时,删除所述每一车辆的所述特征矩阵,形成降维的每一特征数据样本。
进一步地,所述装置还包括:
第二获取单元,利用所述多个传感器获取天气信息和工况信息;
选择单元,用于根据所述天气信息和工况信息,选取与所述天气信息和工况信息对应的预设特征阈值。
进一步地,所述处理单元37还用于当所述特征矩阵的信息熵集合的方差大于或等于所述预设特征阈值时,保留所述每一车辆的所述特征矩阵。
实施本发明,具有如下有益效果:
通过本发明,计算特征矩阵的信息熵,并且根据信息熵的均值和信息熵求取均值,通过均值与预设阈值进行大小比较,挑选出均值大于预设阈值保留,将均值小于或等于预设阈值删除,即保留数据中区别较大的特征,又将无用的冗余数据删除;解决了现有的问题待处理的信息数据维度剧增、处理效率降低且信息中有大量冗杂或矛盾的信息。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种基于多源信息熵差异性的数据降维方法及装置
- 基于类信息熵的多源遥感图像组合选择方法