一种用于工程机械的智能液压系统
文献发布时间:2023-06-19 09:38:30
技术领域
本发明设计工程机械领域,尤其涉及一种用于工程机械的智能液压系统。
背景技术
工程机械是装备工业的重要组成部分。概括地说,凡土石方施工工程、路面建设与养护、流动式起重装卸作业和各种建筑工程所需的综合性机械化施工工程所必需的机械装备,称为工程机械;它主要用于国防建设工程、交通运输建设,能源工业建设和生产、矿山等原材料工业建设和生产、农林水利建设、工业与民用建筑、城市建设、环境保护等领域,工程机械的代表的液压挖掘机包括:能够自行的下部行驶体;可回旋地搭载在该下部行驶体上的上部回旋体;设置在该上部回旋体的前侧并能够进行俯仰动作的作业装置;该作业装置通过进行俯仰动作来进行土砂的挖掘作业等。
本团队长期参与到各大工程项目的技术研究与开发,也对现有的工程机械做了详细的研究,经过海量的检索,了解到现有的液压工程机械的结构主要有如公开号为KR101448704B1、JP2001173008A、CN108167237B和CN103958791B所公开的结构,其中以公开号为CN102383449B为公开的装载机结构,该装置采用双挖掘装置双侧操作,多增加了一个挖掘装置提高了装载的效率;隔爆电机位于整机后部,减少了整机宽度,且保护了电机;整机采用高强度结构钢做关键部件大大减低了整机的重量,便于在井下巷道内的解体运输;刮板运输机可左右摆动在不增加整车长度的情况下一次装载多辆矿车,减少了辅助装载时间,增加了装载效率,但这些挖掘装置通过增加一条机械臂来增加挖斗或其他工程装置的方式存在以下问题:1、操作难度增加,在操作室中的操作人员需要分别操作不同的伸缩机构,而且两个伸缩机构的长度与宽度也有区别,所以容易发生操作失误的情况;2、装置冗余,操作人员使用时往往只能单独操作一侧挖掘装置,很难实现一心二用,所以另一侧的挖掘装置就要处于闲置的情况,所以机械整体没有得到充分的使用,机械冗余度高;3、虽然设置了双铲结构,但挖斗的模式往往也只能实现同正铲或者同反铲,所以机械的结构复杂而且应用场景还是比较单一。
发明内容
本发明的目的在于,针对现在的工程机械所存在的不足,提出了一种用于工程机械的智能液压系统。
为了克服现有技术的不足,本发明采用如下技术方案:
一种用于工程机械的智能液压系统,包括:主机架;
驱动模块,设置在主机架底部,用于带动机体进行移动;
支撑模块,设置在主机架的两侧,用于平衡和支撑机体,防止机体发生侧翻;
伸缩连接杆模块,设置在主机架的前侧,用于带动挖斗进行移动;
双向挖掘模块,设置在所述伸缩连接杆模块的一端,被构造成可进行正铲装料和反铲装料。
进一步的,所述主机架上设置有控制室和动力模块。
进一步的,所述驱动模块包括底架和驱动机构,所述底架安装在主机架的底部,所述驱动机构设置在所述底架上;
进一步的,所述支撑模块被构造成对主机架的进行提升和固定防止车体发生侧翻,所述支撑模块包括第一安装座、第一伸缩杆和旋转安装底座,所述第一安装座安装在底架的面向所述双向挖掘模块的一侧,所述旋转安装底座转动设置在所述第一安装座上,所述第一伸缩杆的一端转动设置在所述第一安装座上,另一端与所述旋转安装底座铰接。
进一步的,所述伸缩连接杆模块包括第二安装座、动臂、斗杆、第二伸缩杆和第三伸缩杆,所述第二安装座安装在所述主机架上,所述动臂的一端转动设置在所述第二安装座上,所述斗杆与所述动臂的另一端转动连接,所述第二伸缩杆的一端转动设置在所述第二安装座上,另一端与所述动臂铰接,所述第三伸缩杆设置在所述动臂的上部且一端与所述动臂的中段连接,另一端与所述斗杆的尾部转动连接。
进一步的,所述双向挖掘模块包括第一伸缩机构和挖斗机构,所述第一伸缩机构被构造成带动所述挖斗机构进行转动,所述第一伸缩机构包括第一挖斗伸缩杆、第一摇杆和第一连杆,所述挖斗机构转动设置在所述斗杆的头部,所述第一挖斗伸缩杆的一端与所述斗杆铰接,另一端与所述第一摇杆和第一连杆铰接,所述第一摇杆的另一端与斗杆转动连接,所述第一连杆的另一端与所述挖斗机构铰接,所述挖斗机构还与所述斗杆转动连接。
进一步的,所述挖斗机构包括挖斗主体、第一斗齿组件、第二斗齿组件、驱动组件和链板组件,所述挖斗主体被构造具有前后两个相互连通的开口,所述第一斗齿组件和第二斗齿组件分别对称设置在所述挖斗主体的前后两侧,所述驱动组件设置在挖斗主体上,所述驱动组件被构造成带动链板组件绕挖斗主体进行移动从而将挖斗主体的两个开口进行单独打开或关闭,所述挖斗主体包括二侧板、顶加固板、耳板、底加固板和二齿座板,所述顶加固板和底加固板的两端分别与两侧的侧板连接,且分别设置于两个侧板的上下两侧,所述耳板设置于所述顶加固板的顶部,且与所述斗杆和第一连杆转动连接,两个所述齿座板分别设置于所述底加固定板的两个宽边侧,所述第一斗齿组件和第二斗齿组件分别转动设置在两个齿座板上。
进一步的,所述第一斗齿组件设置有多个且并排设置在所述齿座板上,所述第一斗齿组件包括齿座、齿销和斗齿,所述齿座安装在齿座板上,所述斗齿通过齿销转动设置在所述斗齿上。
进一步的,所述第二斗齿组件的结构与所述第一斗齿组件的结构相同。
本发明所取得的有益效果是:
设置有双向挖掘模块,可以在同一个装置上同时实现正铲和反铲的操作,使得工程机械不受地形的限制,适用环境广;挖斗的一侧板采用移动链板结构,通过将链板在前后两个开口之间进行移动可实现一开口开放而另一开口封闭的效果,从而根据操作需要切换为开口朝不同方向的铲模式;而且设置有支撑模块,适用于轮式驱动模块虽然移动起来比较灵活,但在左右方向的稳固性上的不足,所以添加了支撑模块进行辅助,提高了工程机械移动和施工的稳定性;还设置有伸缩连接杆模块可以对挖斗的方位和角度进行调节;再通过设置方形挖孔模块可以通过电动刮爪实现电动开孔操作;方形挖孔装置的安装方式简单,与挖斗和伸缩连接杆可以实现很好的配合应用。
附图说明
从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
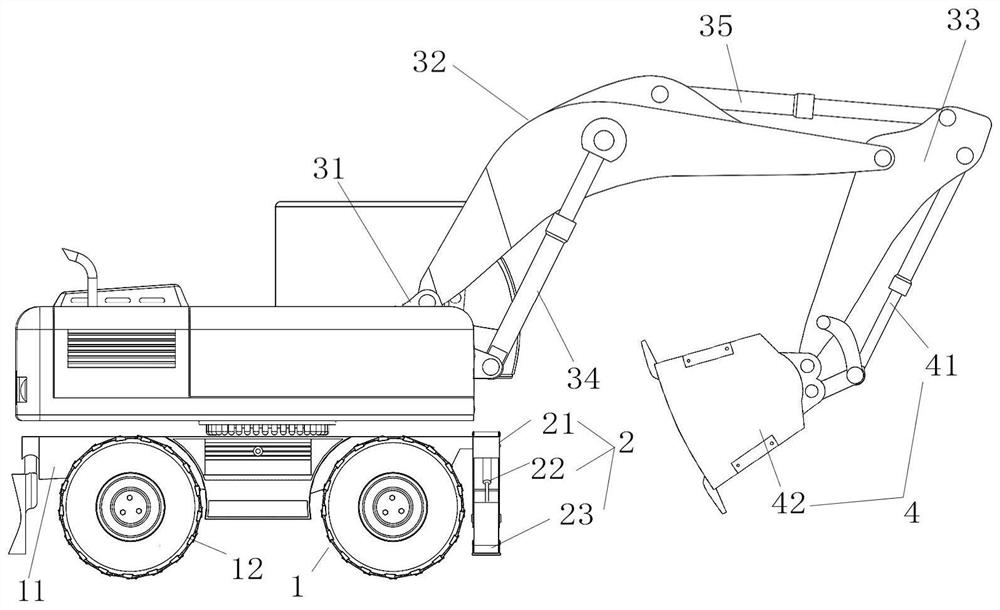
图1为本发明的结构示意图。
图2为本发明的链板组件的结构示意图。
图3为本发明的挖斗机构的内部结构示意图。
图4为本发明的的第二伸缩机构的结构示意图。
图5为本发明的挖斗模块与机箱安装时的主视结构示意图。
图6为本发明的挖斗模块与机箱安装时的侧视结构示意图。
图7为本发明的挖斗模块与机箱安装时的侧视内部结构示意图。
图8为本发明的方形挖孔模块的结构示意图。
图中:驱动模块1、底架11、驱动机构12、支撑模块2、第一安装座21、第一伸缩杆22、旋转安装底座23、伸缩连接杆模块3、第二安装座31、动臂32、斗杆33、第二伸缩杆34、第三伸缩杆35、双向挖掘模块4、第一伸缩机构41、第一挖斗伸缩杆411、第一摇杆412、第一连杆413、挖斗机构42、挖斗主体421、第一斗齿组件422、第二斗齿组件423、驱动组件424、链板组件425、第二伸缩机构43、第二挖斗伸缩杆431、第二摇杆432、第二连杆433、方形挖孔模块5、机箱51、连接板511、侧安装架512、导向板513、刮爪52、转动机构53、第三驱动电机531、第一同步链轮532、第二同步链轮533、同步链534、第五传动链轮535、第六传动链轮536、刮爪安装链537。
具体实施方式
为了使得本发明的目的.技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统.方法.特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,此处定义为主机架的车头朝向为“前侧”,车尾朝向为“后侧”,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位,以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
实施例一。
如图1至图3所示,一种用于工程机械的智能液压系统,包括:主机架;
驱动模块,设置在主机架底部,用于带动机体进行移动;
支撑模块,设置在主机架的两侧,用于平衡和支撑机体,防止机体发生侧翻;
伸缩连接杆模块,设置在主机架的前侧,用于带动挖斗进行移动;
双向挖掘模块,设置在所述伸缩连接杆模块的一端,被构造成可进行正铲装料和反铲装料;
所述主机架上设置有控制室和动力模块;
所述驱动模块包括底架和驱动机构,所述底架安装在主机架的底部,所述驱动机构设置在所述底架上;
所述支撑模块被构造成对主机架的进行提升和固定防止车体发生侧翻,所述支撑模块包括第一安装座、第一伸缩杆和旋转安装底座,所述第一安装座安装在底架的面向所述双向挖掘模块的一侧,所述旋转安装底座转动设置在所述第一安装座上,所述第一伸缩杆的一端转动设置在所述第一安装座上,另一端与所述旋转安装底座铰接;
所述伸缩连接杆模块包括第二安装座、动臂、斗杆、第二伸缩杆和第三伸缩杆,所述第二安装座安装在所述主机架上,所述动臂的一端转动设置在所述第二安装座上,所述斗杆与所述动臂的另一端转动连接,所述第二伸缩杆的一端转动设置在所述第二安装座上,另一端与所述动臂铰接,所述第三伸缩杆设置在所述动臂的上部且一端与所述动臂的中段连接,另一端与所述斗杆的尾部转动连接;
所述双向挖掘模块包括第一伸缩机构和挖斗机构,所述第一伸缩机构被构造成带动所述挖斗机构进行转动,所述第一伸缩机构包括第一挖斗伸缩杆、第一摇杆和第一连杆,所述挖斗机构转动设置在所述斗杆的头部,所述第一挖斗伸缩杆的一端与所述斗杆铰接,另一端与所述第一摇杆和第一连杆铰接,所述第一摇杆的另一端与斗杆转动连接,所述第一连杆的另一端与所述挖斗机构铰接,所述挖斗机构还与所述斗杆转动连接;
所述挖斗机构包括挖斗主体、第一斗齿组件、第二斗齿组件、驱动组件和链板组件,所述挖斗主体被构造具有前后两个相互连通的开口,所述第一斗齿组件和第二斗齿组件分别对称设置在所述挖斗主体的前后两侧,所述驱动组件设置在挖斗主体上,所述驱动组件被构造成带动链板组件绕挖斗主体进行移动从而将挖斗主体的两个开口进行单独打开或关闭,所述挖斗主体包括二侧板、顶加固板、耳板、底加固板和二齿座板,所述顶加固板和底加固板的两端分别与两侧的侧板连接,且分别设置于两个侧板的上下两侧,所述耳板设置于所述顶加固板的顶部,且与所述斗杆和第一连杆转动连接,两个所述齿座板分别设置于所述底加固定板的两个宽边侧,所述第一斗齿组件和第二斗齿组件分别转动设置在两个齿座板上;
所述第一斗齿组件设置有多个且并排设置在所述齿座板上,所述第一斗齿组件包括齿座、齿销和斗齿,所述齿座安装在齿座板上,所述斗齿通过齿销转动设置在所述斗齿上;
所述第二斗齿组件的结构与所述第一斗齿组件的结构相同;
所述侧板上还设置有防护板;
实施例二,本实施例为上述实施例的进一步描述应当理解本实施例包括前述全部技术特征并作进一步具体描述:
一种用于工程机械的智能液压系统,包括:主机架;
驱动模块,设置在主机架底部,用于带动机体进行移动;
支撑模块,设置在主机架的两侧,用于平衡和支撑机体,防止机体发生侧翻;
伸缩连接杆模块,设置在主机架的前侧,用于带动挖斗进行移动;
双向挖掘模块,设置在所述伸缩连接杆模块的一端,被构造成可进行正铲装料和反铲装料;
所述主机架上设置有控制室和动力模块;
所述驱动模块包括底架和驱动机构,所述底架安装在主机架的底部,所述驱动机构设置在所述底架上;
所述支撑模块被构造成对主机架的进行提升和固定防止车体发生侧翻,所述支撑模块包括第一安装座、第一伸缩杆和旋转安装底座,所述第一安装座安装在底架的面向所述双向挖掘模块的一侧,所述旋转安装底座转动设置在所述第一安装座上,所述第一伸缩杆的一端转动设置在所述第一安装座上,另一端与所述旋转安装底座铰接;
所述伸缩连接杆模块包括第二安装座、动臂、斗杆、第二伸缩杆和第三伸缩杆,所述第二安装座安装在所述主机架上,所述动臂的一端转动设置在所述第二安装座上,所述斗杆与所述动臂的另一端转动连接,所述第二伸缩杆的一端转动设置在所述第二安装座上,另一端与所述动臂铰接,所述第三伸缩杆设置在所述动臂的上部且一端与所述动臂的中段连接,另一端与所述斗杆的尾部转动连接;
所述双向挖掘模块包括第一伸缩机构和挖斗机构,所述第一伸缩机构被构造成带动所述挖斗机构进行转动;
所述第一伸缩机构包括第一挖斗伸缩杆、第一摇杆和第一连杆,所述挖斗机构转动设置在所述斗杆的头部,所述第一挖斗伸缩杆的一端与所述斗杆铰接,另一端与所述第一摇杆和第一连杆铰接,所述第一摇杆的另一端与斗杆转动连接,所述第一连杆的另一端与所述挖斗机构铰接,所述挖斗机构还与所述斗杆转动连接;
所述挖斗机构包括挖斗主体、第一斗齿组件、第二斗齿组件、驱动组件和链板组件,所述挖斗主体被构造具有前后两个相互连通的开口,所述第一斗齿组件和第二斗齿组件分别对称设置在所述挖斗主体的前后两侧,所述驱动组件设置在挖斗主体上,所述驱动组件被构造成带动链板组件绕挖斗主体进行移动从而将挖斗主体的两个开口进行单独打开或关闭;
所述挖斗主体包括二侧板、顶加固板、耳板、底加固板和二齿座板,所述顶加固板和底加固板的两端分别与两侧的侧板连接,且分别设置于两个侧板的上下两侧,所述耳板设置于所述顶加固板的顶部,且与所述斗杆和第一连杆转动连接,两个所述齿座板分别设置于所述底加固定板的两个宽边侧,所述第一斗齿组件和第二斗齿组件分别转动设置在两个齿座板上;
所述第一斗齿组件设置有多个且并排设置在所述齿座板上,所述第一斗齿组件包括齿座、齿销和斗齿,所述齿座安装在所述齿座板上,所述斗齿通过齿销转动设置在所述斗齿上;
所述第二斗齿组件的结构与所述第一斗齿组件的结构相同;
所述侧板上还设置有防护板;
所述驱动组件包括第二驱动电机、主传动链轮、第一传动链轮、第二传动链轮、第三传动链轮、第四传动链轮,所述侧板上设置有用于隐藏安装各个传动链轮的链轮安装室,所述第一传动链轮和第二传动链轮设置在偏底部且的链轮安装室上,所述第三传动链轮和第四传动链轮设置在偏顶部的链轮安装室上,所述第二驱动电机设置在侧板的外侧且设置在偏上方的位置,所述第二驱动电机的转轴贯穿所述侧板与主传动链轮传动连接,所述第一传动链轮、第二传动链轮、第三传动链轮和第四传动链轮均设置有两组且分别对齐设置在两个侧板上;
所述链板组件包括两个传动链、连接板和连接轴,所述连接轴设置有多个,且依次排列,同时与设置在两侧的传动链上的多个连接销连接,所述连接板也设置有多个,两个相邻的连接轴上均转动设置有一个连接板,所述侧板上均设置有用于放置链条的链条槽,两组所述传动链分别设置在两个侧板的链条槽内,且环绕转动设置在各个传动链轮上;
所述连接板的底部均设置有加强板;
进一步结合图4所示,所述双向挖掘模块还包括第二伸缩机构,所述第二伸缩机构设置斗杆远离第一挖斗伸缩杆的一侧,用于与第一挖斗伸缩杆配合提供挖斗两个方向的作用力支持;
所述第二伸缩机构包括第二挖斗伸缩杆、第二摇杆和第二连杆,所述挖斗主体上还设置有第二耳板,所述第二挖斗伸缩杆一端与斗杆背向所述第一挖斗伸缩杆的一面铰接,另一端与所述第二摇杆和第二连杆铰接,所述第二摇杆的另一端与斗杆转动连接,所述第二连杆的另一端与第二耳板转动连接;
实施例三,本实施例为上述实施例的进一步描述应当理解本实施例包括前述全部技术特征并作进一步具体描述:
进一步结合图5至图8所示,一种用于工程机械的智能液压系统,包括:主机架;
驱动模块,设置在主机架底部,用于带动机体进行移动;
支撑模块,设置在主机架的两侧,用于平衡和支撑机体,防止机体发生侧翻;
伸缩连接杆模块,设置在主机架的前侧,用于带动挖斗进行移动;
双向挖掘模块,设置在所述伸缩连接杆模块的一端,被构造成可进行正铲装料和反铲装料;
所述主机架上设置有控制室和动力模块;
所述驱动模块包括底架和驱动机构,所述底架安装在主机架的底部,所述驱动机构设置在所述底架上;
所述驱动机构为轮式驱动结构,所述驱动机构包括第一驱动电机和驱动轮,所述第一驱动电机安装在底架上且与所述驱动轮转动连接,所述驱动机构设置有四组且分别设置在所述底架的四角;
所述支撑模块被构造成对主机架的进行提升和固定防止车体发生侧翻,所述支撑模块包括第一安装座、第一伸缩杆和旋转安装底座,所述第一安装座安装在底架的面向所述双向挖掘模块的一侧,所述旋转安装底座转动设置在所述第一安装座上,所述第一伸缩杆的一端转动设置在所述第一安装座上,另一端与所述旋转安装底座铰接;
所述伸缩连接杆模块包括第二安装座、动臂、斗杆、第二伸缩杆和第三伸缩杆,所述第二安装座安装在所述主机架上,所述动臂的一端转动设置在所述第二安装座上,所述斗杆与所述动臂的另一端转动连接,所述第二伸缩杆的一端转动设置在所述第二安装座上,另一端与所述动臂铰接,所述第三伸缩杆设置在所述动臂的上部且一端与所述动臂的中段连接,另一端与所述斗杆的尾部转动连接;
所述双向挖掘模块包括第一伸缩机构和挖斗机构,所述第一伸缩机构被构造成带动所述挖斗机构进行转动;
所述第一伸缩机构包括第一挖斗伸缩杆、第一摇杆和第一连杆,所述挖斗机构转动设置在所述斗杆的头部,所述第一挖斗伸缩杆的一端与所述斗杆铰接,另一端与所述第一摇杆和第一连杆铰接,所述第一摇杆的另一端与斗杆转动连接,所述第一连杆的另一端与所述挖斗机构铰接,所述挖斗机构还与所述斗杆转动连接;
所述挖斗机构包括挖斗主体、第一斗齿组件、第二斗齿组件、驱动组件和链板组件,所述挖斗主体被构造具有前后两个相互连通的开口,所述第一斗齿组件和第二斗齿组件分别对称设置在所述挖斗主体的前后两侧,所述驱动组件设置在挖斗主体上,所述驱动组件被构造成带动链板组件绕挖斗主体进行移动从而将挖斗主体的两个开口进行单独打开或关闭;
所述挖斗主体包括二侧板、顶加固板、耳板、底加固板和二齿座板,所述顶加固板和底加固板的两端分别与两侧的侧板连接,且分别设置于两个侧板的上下两侧,所述耳板设置于所述顶加固板的顶部,且与所述斗杆和第一连杆转动连接,两个所述齿座板分别设置于所述底加固定板的两个宽边侧,所述第一斗齿组件和第二斗齿组件分别转动设置在两个齿座板上;
所述第一斗齿组件设置有多个且并排设置在所述齿座板上,所述第一斗齿组件包括齿座、齿销和斗齿,所述齿座安装在所述齿座板上,所述斗齿通过齿销转动设置在所述斗齿上;
所述第二斗齿组件的结构与所述第一斗齿组件的结构相同;
所述侧板上还设置有防护板;
所述驱动组件包括第二驱动电机、主传动链轮、第一传动链轮、第二传动链轮、第三传动链轮、第四传动链轮,所述侧板上设置有用于隐藏安装各个传动链轮的链轮安装室,所述第一传动链轮和第二传动链轮设置在偏底部且的链轮安装室上,所述第三传动链轮和第四传动链轮设置在偏顶部的链轮安装室上,所述第二驱动电机设置在侧板的外侧且设置在偏上方的位置,所述第二驱动电机的转轴贯穿所述侧板与主传动链轮传动连接,所述第一传动链轮、第二传动链轮、第三传动链轮和第四传动链轮均设置有两组且分别对齐设置在两个侧板上;
所述链板组件包括两个传动链、连接板和连接轴,所述连接轴设置有多个,且依次排列,同时与设置在两侧的传动链上的多个连接销连接,所述连接板也设置有多个,两个相邻的连接轴上均转动设置有一个连接板,所述侧板上均设置有用于放置链条的链条槽,两组所述传动链分别设置在两个侧板的链条槽内,且环绕转动设置在各个传动链轮上;
所述连接板的底部均设置有加强板;
所述双向挖掘模块还包括第二伸缩机构,所述第二伸缩机构设置斗杆远离第一挖斗伸缩杆的一侧,用于与第一挖斗伸缩杆配合提供挖斗两个方向的作用力支持;
所述第二伸缩机构包括第二挖斗伸缩杆、第二摇杆和第二连杆,所述挖斗主体上还设置有第二耳板,所述第二挖斗伸缩杆一端与斗杆背向所述第一挖斗伸缩杆的一面铰接,另一端与所述第二摇杆和第二连杆铰接,所述第二摇杆的另一端与斗杆转动连接,所述第二连杆的另一端与第二耳板转动连接;
还包括方形挖孔模块,所述方形挖孔模块包括机箱、刮爪和转动机构,所述挖斗主体的两侧设置有卡接凸台,所述机箱的两个长边内侧均设置有与所述卡接凸台配合连接的安装槽,通过将卡接凸台滑进所述安装槽可将机箱安装在挖斗主体上,所述转动机构设置在所述机箱上,所述转动机构用于带动所述刮爪进行圆周转动;
所述机箱包括连接板、侧安装架和导向板,所述侧安装板设置有两个,且分别设置在所述连接板的底部两侧,所述导向板设置在所述侧安装架上且设置在前端,所述导向板用于将刮出的土料导向挖斗主体内;
所述侧安装架的前侧在安装槽开口处设置有滑板锁定机构,所述滑板锁定机构用于升起时挡住卡接凸台,防止方形挖孔模块与挖斗主体脱离连接;
所述转动机构包括第三驱动电机、第一同步链轮、第二同步链轮、同步链、第五传动链轮、第六传动链轮和刮爪安装链,所述第五传动链轮和第六传动链轮均通过转轴转动设置在同一安装板的内侧,所述第一传动链轮通过刮爪安装链与所述第二传动链轮转动连接,所述第一传动链轮和第二传动链均设置有两组且分别设置在两个转轴上,所述第一传动链轮连接的转轴的其中一外端还连接有第一同步链轮,所述侧安装架的外侧还设置有电机安装座,所述第三驱动电机设置在所述电机安装座上,且安装在所述第三驱动电机上的第二同步链轮通过同步链与所述第一同步链轮传动连接;
正铲切换,第二驱动电机带动各个传动链轮转动从而带动链板组件沿着各个传动链轮做顺时针方向转动,最终链板组件移动到挖斗主体的后部,将挖斗主体的前开口打开,即可将挖斗机构切换成前开放、后封闭的正铲形状;
反铲切换,第二驱动电机带动各个传动链轮转动从而带动链板组件沿着各个传动链轮做逆时针方向转动,最终链板组件移动到挖斗主体的前部,将挖斗主体的后开口打开,即可将挖斗机构切换成后开放、前封闭的反铲形状;
方形挖孔模块的装配和应用,将链板组件进行移动从而使得挖斗主体切换为后开放、前封闭的反铲形状,通过将挖斗主体的的卡接凸台滑进安装槽进行匹配安装,然后将滑板锁定机构滑上将安装槽的开口封闭从而进行锁定连接,此时可启动第三驱动电机从而带动刮爪绕第五传动链轮和第六传动链轮进行圆周转动,通过控制伸缩连接杆模块调节方形挖孔模块的方位和与地面的接触面积从而实施挖掘,此时刮爪刮起的泥土会沿着刮爪安装链的转动趋势抛向导向板从而滑进挖斗主体中从而可对土料进行收集。
虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
- 一种用于工程机械的智能液压系统
- 一种工程机械智能控制合流的液压系统