一种基于Costas环的全数字半球谐振陀螺频率跟踪回路
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及半球谐振陀螺数字信号处理领域,尤其涉及一种基于Costas环的全数字半球谐振陀螺频率跟踪回路。
背景技术
半球谐振陀螺是一种基于科里奥利效应的固体振动陀螺,其具有高精度、长寿命、高可靠性、质量小以及体积小等特点,目前已应用于航天、航海、战术等领域,半球谐振陀螺已成为当前惯性导航领域内的研究热点。
半球谐振陀螺有力平衡和全角两种工作模式,可分别用于角速度或者角度的测量,两种工作模式对应控制电路涉及陀螺信号采集、信号处理、滤波、幅度控制、正交控制以及频率跟踪等多个环节。其中陀螺振动信号的解调一般需要跟踪陀螺的谐振频率产生本振信号,基于本振信号进行解调,根据解调量计算出陀螺振动信号的幅度以及方位角等信息;另外跟踪得到的本振信号用于陀螺信号调制。因此频率跟踪回路的稳定性能和跟踪精度直接影响到陀螺控制的稳定与解算角度的精度。
在力平衡模式下陀螺振型被控制在固定电极方向,可对陀螺振型波腹轴单个电极上信号进行频率跟踪;在全角模式下因陀螺振型自由进动,需利用利用谐振子上互成45°两个电极上信号进行频率跟踪。频率跟踪的方法有多种,基于模拟电路鉴相方式不需要数字电路支持,但依赖于硬件电路精度,受信号干扰影响大;基于全数字频率跟踪需要实现进行数字信号鉴相、滤波,如何实现高精度频率跟踪是目前需要解决的问题。
发明内容
本发明针对现有技术中存在的技术问题,提供一种基于Costas环的全数字半球谐振陀螺频率跟踪回路,解决现有技术中半球谐振陀螺频率跟踪精度低的问题。
本发明解决上述技术问题的技术方案如下:一种基于Costas环的全数字半球谐振陀螺频率跟踪回路,包括:陀螺电极振动信号采样电路、压控振荡器、乘法器、低通滤波器、相位误差信号运算器和环路滤波器;
所述陀螺电极振动信号采样电路分别采集陀螺x电极和y电极上的振动信号;
两路振动信号分别与所述压控振荡器的sin支路和cos支路的输出信号通过各个所述乘法器进行乘法鉴相,再通过各个所述低通滤波器进行滤波;
滤波后的信号经过所述相位误差信号运算器计算得到相位误差信号后送至所述环路滤波器;
所述环路滤波器根据输入的所述相位误差信号产生控制信号,所述控制信号对所述压控振荡器输出信号的相位进行调整,使得所述振动信号与所述压控振荡器输出信号相位差不断减小至环路锁定稳态相位差
本发明的有益效果是:基于Costas环技术在FPGA中实现了全数字半球谐振陀螺的频率跟踪回路设计,可提高频率跟踪的精度,并具有结构简单、通用性强的优点。
在上述技术方案的基础上,本发明还可以做如下改进。
进一步,所述陀螺电极振动信号采样电路包括分别与陀螺x电极和y电极连接的两路AD采样电路;
两路AD采样电路通过同步触发信号进行同步采集。
进一步,所述压控振荡器的sin支路和cos支路的信号分别为:
V
进一步,所述相位误差信号L根据经过四个所述低通滤波器进行滤波后得到的参量得到:
其中,四个参量C
x为x电极的振动信号,y为y电极的振动信号,a为主波波腹,q为正交波腹,θ为主波波腹与x电极方位角,
进一步,所述频率跟踪回路还包括α-β滤波器;
所述相位误差信号经过所述α-β滤波器进行α-β滤波再后送至所述环路滤波器。
进一步,所述环路滤波器在z域的数字化系统函数为:
C
进一步,压控振荡器在FPGA中采用DDS实现,所述DDS的输出信号的频率为:
f
M
采用上述进一步方案的有益效果是:采集陀螺电极x电极和y电极上的振动信号的两路AD采样电路通过同步触发信号进行同步采集,避免两路采集信号存在相位差异;低通滤波器的量化位宽需要仿真测试,防止系数位宽不足时会影响该低通滤波器的性能;相位误差信号L经过α-β滤波,实现对相位误差信号的平滑处理,可提高频率跟踪精度。
附图说明
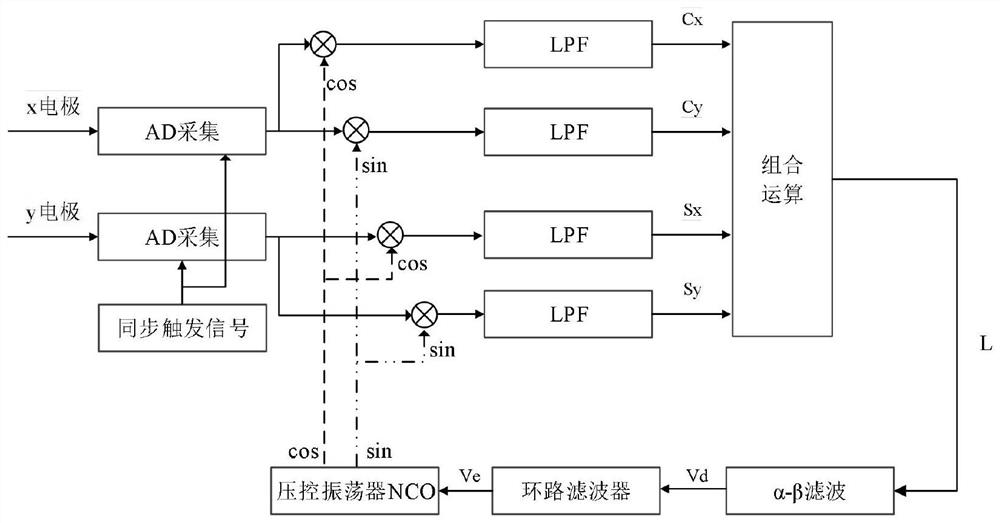
图1为本发明实施例提供的一种基于Costas环的全数字半球谐振陀螺频率跟踪回路的原理框图;
图2为本发明实施例提供的陀螺振动信号正交分解示意图;
图3为本发明实施例提供的环路滤波器FPGA结构示意图。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
如图1所示为本发明实施例提供的一种基于Costas环的全数字半球谐振陀螺频率跟踪回路的原理框图,由图1可知,该频率跟踪回路包括:
陀螺电极振动信号采样电路、压控振荡器NCO、乘法器、低通滤波器、相位误差信号运算器和环路滤波器。
陀螺电极振动信号采样电路分别采集陀螺x电极和y电极上的振动信号。
两路振动信号分别与压控振荡器NC0的sin支路和cos支路的输出信号通过各个乘法器进行乘法鉴相,再通过各个低通滤波器进行滤波。
滤波后的信号经过相位误差信号运算器计算得到相位误差信号后送至环路滤波器。
环路滤波器根据输入的相位误差信号产生控制信号,控制信号对输出信号的相位进行调整,使得振动信号与输出信号相位差不断减小至环路锁定稳态相位差
基于Costas环技术在FPGA中实现了全数字半球谐振陀螺的频率跟踪回路设计,可提高频率跟踪的精度,并具有结构简单、通用性强的优点。
实施例1
本发明实施例1提供的实施例为本发明提供的一种基于Costas环的全数字半球谐振陀螺频率跟踪回路的实施例,该频率跟踪回路的实施例包括:
陀螺电极振动信号采样电路、压控振荡器NCO、乘法器、低通滤波器、相位误差信号运算器、α-β滤波器和环路滤波器。
陀螺电极振动信号采样电路分别采集陀螺x电极和y电极上的振动信号。
具体的,陀螺电极振动信号采样电路包括分别与陀螺x电极和y电极连接的两路AD采样电路。
两路AD采样电路通过同步触发信号进行同步采集,避免两路采集信号存在相位差异。
如图2所示为本发明实施例提供的陀螺振动信号正交分解示意图,结合图2,x电极和y电极的振动信号的表达式为:
其中,a为主波波腹,q为正交波腹,θ为主波波腹与x电极方位角,ω
两路振动信号分别与压控振荡器NCO的sin支路和cos支路的输出信号通过各个乘法器进行乘法鉴相,再通过各个低通滤波器进行滤波。
具体的,压控振荡器NC0的sin支路和cos支路信号分别为:
V
滤波后的信号经过相位误差信号运算器计算得到相位误差信号后送至环路滤波器。
具体的,相位误差信号L根据经过四个低通滤波器进行滤波后得到的参量得到:
其中,四个参量C
式中,
x电极和y电极的振动信号分别与DDS(Direct Digital Synthesis,直接数字频率合成)的cos支路和sin支路信号相乘,并通过低通滤波,得到四个参量C
低通滤波器LPF可滤除乘法解调中的倍频分量和带外噪声,低通滤波器LPF在FPGA中实现需要将滤波器系数量化成定点数,当系数位宽不足时会影响滤波器性能,因此需要进行量化位宽的仿真测试。
相位误差信号经过α-β滤波器进行α-β滤波再后送至环路滤波器。
相位误差信号L经过α-β滤波,α-β滤波是一种可用于状态估计、数据平滑滤波器,该滤波器稳定性比较好,可实现对相位误差信号的平滑处理,可提高频率跟踪精度。
环路滤波器根据输入的相位误差信号产生控制信号,控制信号对压控振荡器输出信号的相位进行调整,使得振动信号与压控振荡器输出信号相位差不断减小至环路锁定稳态相位差
该回路设计中Costas环是一个二阶环路,Costas环路是一种载波跟踪的环路,环路只跟踪输入信号载波的变化,不跟踪调制信号变化,环路带宽窄,适用于低性噪比信号载波提取。在环路的捕获过程中,环路滤波器根据输入经过α-β滤波后的相位误差信号V
优选的,如图3所示为本发明实施例提供的环路滤波器FPGA结构示意图,由图3可知,环路滤波器z域的数字化系统函数为:
上式中,C
进一步的,压控振荡器NC0在FPGA中采用DDS实现,DDS的输出信号的频率为:
f
上式中,M
压控振荡器NCO输出频率随着输入控制信号V
本发明实施例提供的一种基于Costas环的全数字半球谐振陀螺频率跟踪回路,通过两路模数AD芯片采集陀螺电极上的振动信号;采集得到的两路数字信号分别与压控振荡器NC0的sin和cos支路进行乘法鉴相,再通过低通滤波器进行滤波;滤波后的参量经过组合计算得到相位差信号;相位差信号通过α-β滤波进行信号平滑处理;处理后的信号送至环路滤波器,环路滤波器根据环路参数(AD采集位数、AD采样率、系统时钟频率、低通滤波器系数、输出数据位宽)进行设计;环路滤波器输出信号用于调整后端DDS输出的信号,最终使得陀螺振动信号载波与压控振荡器NCO输出信号的频率一致,实现半球谐振陀螺的频率跟踪。
以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于Costas环的全数字半球谐振陀螺频率跟踪回路
- 一种基于集员理论的半球谐振陀螺仪使用性能提升方法