一种农业机器人播种机技术
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及一种农业机械设备人工智能技术领域,尤其涉及一种农业机器人播种机技术。
背景技术
农业是指国民经济中一个重要产业部门,是以土地资源为生产对象的部门,它是通过培育动植物产品从而生产食品及工业原料的产业,农业属于第一产业,利用土地资源进行种植生产的部门是种植业,利用土地上水域空间进行水产养殖的是水产业,又叫渔业,利用土地资源培育采伐林木的部门,是林业,利用土地资源培育或者直接利用草地发展畜牧的是畜牧业,对这些产品进行小规模加工或者制作的是副业,它们都是农业的有机组成部分,对这些景观或者所在地域资源进行开发并展示的是观光农业,又称休闲农业,这是新时期随着人们的业余时间富余而产生的新型农业形式,特别是在种植业中人们在耕种的时候需要用到播种机,播种机以作物种子为播种对象的种植机械,用于某类或某种作 物的播种机,常冠以作物种类名称,如谷物条播机、玉米穴播机、棉花播种机、牧草撒播机等,同时随着人工智能及计算机技术的快速发展,智慧农业概念逐步提出,目前播种已实现了现代化,农业机械层出不穷,农业已经进入一个新的环境,新的秩序,新的世界;人们可以继续采用传统方法从事农业生产,但是未来的农业方向是朝着更智能的方向发展,例如使用大数据、人工智能和机器人等;
目前的现代化播种机在使用的过程中,特别是运用机器人代替工人进行作业的播种机,在长期运行的过程中,不能很好的把握播种精确度,造成播种率出现误差,进而影响播种机的播种速度,同时播种机在进行吸种时,可能会造成吸种堵塞的情况出现,不利于实际使用。
发明内容
本发明的目的是提供一种农业机器人播种机技术,通过设置有播种机构和视觉系统,通过视觉系统捕捉到苗盘的位置后,两个机械手臂搭配吸盘头各负责对苗盘一半的播种量进行播种作业,同时利用视觉探头对苗盘播种前后的种子含量进行检测反馈,从而确保播种的精确度,降低播种作业出现遗漏种子的现象,进而提高了播种机的播种速度和准确率,同时由于吸盘头采用真空吸盘,而且其材质具备弹性特质,可以有效的避免吸盘头堵塞的问题,以此解决上述背景技术中提到的问题。
为了实现上述目的,本发明采用了如下技术方案:一种农业机器人播种机技术,包括工作机架、机械手臂、传送带和视觉系统,所述传送带固定安装在工作机架的内侧,且传送带的上表面放置有苗盘,所述工作机架的顶部装设有固定架,所述视觉系统设置在固定架的顶部下表面,所述机械手臂的数量为两个,且两个机械手臂分别固定安装在工作机架的两侧,所述机械手臂的执行端正好位于视觉系统的斜下方,且机械手臂的执行端设置有播种机构。
优选的,所述视觉系统由视觉探头、探头底座和照明灯组成,所述视觉探头和探头底座的数量均设置为两个,且视觉探头的位于固定架的顶部内表面的竖直向中心轴线上,所述视觉探头的顶部与探头底座固定连接,所述探头底座的顶部与固定架的顶部固定连接,所述照明灯的数量设置为多个,且多个照明灯关于视觉探头的水平向中心轴线呈两两对称分布设置。
优选的,所述播种机构包括有吸盘平台,所述吸盘平台为内部开设有空腔的方形结构,且吸盘平台靠近机械手臂的一侧中心位置处螺纹连接有吸盘底座,所述吸盘底座远离吸盘平台的一端与机械手臂的执行端固定连接,所述机械手臂的内部配备有气管汇总,所述气管汇总通过吸盘底座的内部通孔与吸盘平台的内腔相通,所述吸盘平台远离机械手臂的一侧设置有吸料机构。
优选的,所述吸料机构包括多个吸盘内径口,多个所述吸盘内径口在吸盘平台的侧面呈矩形阵列式分布设置,且吸盘内径口与吸盘平台的内腔相通,所述吸盘内径口由第一口径部、第二口径部和第三口径部组成,所述第一口径部的内径大于第二口径部的直径,所述第二口径部的直径大于第三口径部的直径,且第一口径部、第二口径部的内表面均设置有螺纹一,所述吸盘平台远离机械手臂的一侧、对应各个吸盘内径口的位置处均装设有吸盘头,所述吸盘头的吸口处为橡胶材料制成。
优选的,所述吸盘头由吸口部一、直筒部一和连接筒一组成,所述吸口部一为内部开设有通孔的圆台状结构,所述吸口部一与直筒部一相通,所述连接筒一的套接在直筒部一的外部,且连接筒一的外部设置有螺纹二,所述直筒部一远离吸口部一的一端装设有密封圈一,所述密封圈一为O型结构,且密封圈一为橡胶材料制成,所述吸盘头插入吸盘内径口,且吸盘头通过连接筒一螺纹连接在第一口径部的内部。
优选的,所述吸盘头由吸口部二、直筒部二和连接筒二组成,所述吸口部二为内部开设有通孔的圆台状结构,所述直筒部二与吸口部二相通,所述连接筒二为大小口径不同的两个空心圆筒组成,且连接筒二的外部设置有螺纹三,所述吸盘头插入吸盘内径口,且吸盘头通过连接筒二螺纹连接在第一口径部和第二口径部的内部,所述直筒部二远离吸口部二的一端装设有密封圈二,所述密封圈二为O型结构。
优选的,所述吸盘头由吸口部三、直筒部三和连接筒三组成,所述直筒部三的外径等于第三口径部的内径,所述连接筒三的外表面设置有螺纹三,所述吸盘头插入吸盘内径口,且吸盘头通过连接筒三螺纹连接于第一口径部和第二口径部的内部,所述直筒部三延伸至第三口径部的内部,且直筒部三的外表面与第三口径部的内表面相贴合。
优选的,所述苗盘为方形结构,且苗盘的上表面开设有多个容置槽,多个所述容置槽在苗盘的上表面呈矩形阵列式分布。
本发明至少具备以下有益效果:
1、通过设置有播种机构和视觉系统,通过视觉系统捕捉到苗盘的位置后,两个机械手臂搭配吸盘头各负责对苗盘一半的播种量进行播种作业,同时利用视觉探头对苗盘播种前后的种子含量进行检测反馈,从而确保播种的精确度,降低播种作业出现遗漏种子的现象,进而提高了播种机的播种速度和准确率,同时由于吸盘头采用真空吸盘,而且其材质具备弹性特质,可以有效的避免吸盘头堵塞的问题,利于实际使用。
2、通过设置有吸料机构,通过将吸盘头插入吸盘内径口采用螺纹连接的方式进行连接,方便对不同规格的吸盘头进行更换使用,提高本设备的适用范围,且本发明提出了三种不同规格的吸盘头更换方式,避免了在更换不同规格的吸盘头时还需要更换对应的吸盘平台的问题,操作较为简便,对提高设备的适用范围及其工作效率都起到了积极的效果,实用性较强。
附图说明
为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的整体结构示意图;
图2为本发明图1的A部放大图;
图3为本发明的等轴侧示意图;
图4为本发明图3的B部放大图;
图5为本发明的吸盘内径口结构示意图;
图6为本发明的吸盘头结构示意图;
图7为本发明的实施例二的吸盘头结构示意图;
图8为本发明的实施例三的吸盘头结构示意图。
图中:1工作机架、2机械手臂、3传送带、4视觉系统、5苗盘、6固定架、7播种机构、41视觉探头、42探头底座、43照明灯、71吸盘平台、72吸盘底座、73气管汇总、74吸料机构、741吸盘内径口、7411第一口径部、7412第二口径部、7413第三口径部、742吸盘头、7421吸口部一、7422直筒部一、7423连接筒一、7424密封圈一、7425吸口部二、7426直筒部二、7427连接筒二、7428密封圈二、7429吸口部三、74210直筒部三、74211连接筒三、51容置槽。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
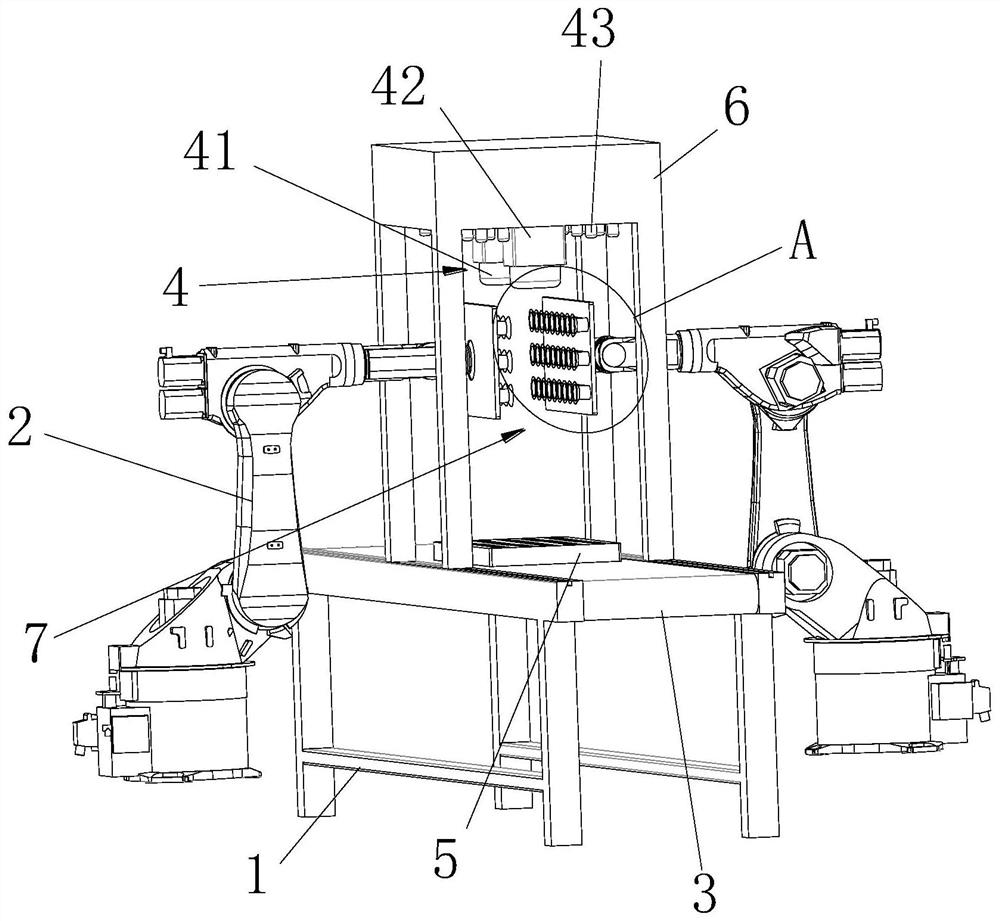
参照图1-6,本发明的实施例一的一种农业机器人播种机技术,包括一种农业机器人播种机技术,包括工作机架1、机械手臂2、传送带3和视觉系统4,传送带3固定安装在工作机架1的内侧,且传送带3的上表面放置有苗盘5,设置有传送带3是为了实现对苗盘5的传输作业,进而方便进行上料,工作机架1的顶部装设有固定架6,视觉系统4设置在固定架6的顶部下表面,机械手臂2的数量为两个,且两个机械手臂2分别固定安装在工作机架1的两侧,两个机械手臂2搭配吸盘头742各负责对苗盘5一半的播种量进行播种作业,机械手臂2的执行端正好位于视觉系统4的斜下方,且机械手臂2的执行端设置有播种机构7。
视觉系统4由视觉探头41、探头底座42和照明灯43组成,视觉探头41和探头底座42的数量均设置为两个,且视觉探头41的位于固定架6的顶部内表面的竖直向中心轴线上,视觉探头41的顶部与探头底座42固定连接,探头底座42的顶部与固定架6的顶部固定连接,照明灯43的数量设置为多个,且多个照明灯43关于视觉探头41的水平向中心轴线呈两两对称分布设置,视觉系统41是分为播种前定位拍照系统和播种率检测系统,当传送带3带动苗盘5运行到视觉系统41的正下方时,这时候传送带3停止运行,其中一个视觉探头41负责对苗盘5此时的种子状态进行拍照,然后在经由机械手臂2带动播种机构7进行播种作业,当播种完成后,另一个视觉探头41对播种完后的苗盘5再次进行拍照进行反馈,经过处理器进行比对,以此来判断苗盘5播种前后的种子含量的差异性,从而确保播种的精确度,降低播种作业出现遗漏种子的现象,进而提高了播种机的播种速度和准确率。
播种机构7包括有吸盘平台71,吸盘平台71为内部开设有空腔的方形结构,且吸盘平台71靠近机械手臂2的一侧中心位置处螺纹连接有吸盘底座72,吸盘底座72远离吸盘平台71的一端与机械手臂2的执行端固定连接,机械手臂2的内部配备有气管汇总73,气管汇总73通过吸盘底座72的内部通孔与吸盘平台71的内腔相通,吸盘平台71远离机械手臂2的一侧设置有吸料机构74,通过机械手臂2带动吸盘平台71进行移动,从而带动吸料机构74对苗盘5上的种子进行吸取,在吸取后机械手臂2在带动种子进行播种,设置有气管汇总73,是为了给与吸料机构74一个吸力,也就是给吸盘头742一个吸力,从而使得种子可以被顺利吸取。
吸料机构74包括多个吸盘内径口741,多个吸盘内径口741在吸盘平台71的侧面呈矩形阵列式分布设置,且吸盘内径口741与吸盘平台71的内腔相通,吸盘内径口741由第一口径部7411、第二口径部7412和第三口径部7413组成,第一口径部7411的内径大于第二口径部7412的直径,第二口径部7412的直径大于第三口径部7413的直径,且第一口径部7411、第二口径部7412的内表面均设置有螺纹一,吸盘平台71远离机械手臂2的一侧、对应各个吸盘内径口741的位置处均装设有吸盘头742,吸盘头742的吸口处为橡胶材料制成,将吸盘内径口741分成三个内径不同的部位,是为了给与三种不同的吸盘头742进行固定连接的空间支持,进而使得在播种不同需求下,当需要更换吸盘头742时,不需要将吸盘平台71整体拆卸下来,只需要将对应的吸盘头742的连接筒部旋转至合适的口径部即可,方便快捷,对提高工作效率和操作简便性都起到积极的效果,实用性较强。
吸盘头742由吸口部一7421、直筒部一7422和连接筒一7423组成,吸口部一7421为内部开设有通孔的圆台状结构,吸口部一7421与直筒部一7422相通,连接筒一7423的套接在直筒部一7422的外部,且连接筒一7423的外部设置有螺纹二,直筒部一7422远离吸口部一7421的一端装设有密封圈一7424,密封圈一7424为O型结构,且密封圈一7424为橡胶材料制成,吸盘头742插入吸盘内径口741,且吸盘头742通过连接筒一7423螺纹连接在第一口径部7411的内部,当吸盘头742进行安装在吸盘内径口741的内部时,该吸盘头742的直筒部一7422旋转插入吸盘内径口741,随着吸盘头742的不断旋转,连接筒一7423与第一口径部741螺纹连接的同时也会挤压密封圈一7424,使得吸盘头742与吸盘内径口741连接密封性更好。
苗盘5为方形结构,且苗盘5的上表面开设有多个容置槽51,多个容置槽51在苗盘5的上表面呈矩形阵列式分布,如此设置是为了给与种子放置的空间,同时也使得吸盘头742可以顺利的吸取种子进行播种作业。
参照图1-5和图7,本发明的实施例二的吸盘头742由吸口部二7425、直筒部二7426和连接筒二7427组成,吸口部二7425为内部开设有通孔的圆台状结构,直筒部二7426与吸口部二7425相通,连接筒二7427为大小口径不同的两个空心圆筒组成,且连接筒二7427的外部设置有螺纹三,吸盘头742插入吸盘内径口741,且吸盘头742通过连接筒二7427螺纹连接在第一口径部7411和第二口径部7412的内部,直筒部二7426远离吸口部二7425的一端装设有密封圈二7428,密封圈二7428为O型结构,当该吸盘头742进行安装时,连接筒二7427螺纹连接于第一口径部7411和第二口径部7412的内部,相对应会挤压密封圈二7428来加强吸盘头742与吸盘内径口741的密封性,完成装配作业。
参照图1-5和图8,吸盘头742由吸口部三7429、直筒部三74210和连接筒三74211组成,直筒部三74210的外径等于第三口径部7413的内径,连接筒三74211的外表面设置有螺纹三,吸盘头742插入吸盘内径口741,且吸盘头742通过连接筒三74211螺纹连接于第一口径部7411和第二口径部7412的内部,直筒部三74210延伸至第三口径部7413的内部,且直筒部三74210的外表面与第三口径部7413的内表面相贴合,同实施例二的安装步骤一致,同时直筒部三74210的会延伸至第三口径部7413的内部,利用直筒部74210的橡胶弹性,对该吸盘头742加强密封效果。
本方案具备以下工作过程:当进行播种作业时,首先当传送带3带动苗盘5运行到视觉系统41的正下方时,这时候传送带3停止运行,其中一个视觉探头41负责对苗盘5此时的种子状态进行拍照,然后在经由机械手臂2带动播种机构7进行播种作业,当播种完成后,另一个视觉探头41对播种完后的苗盘5再次进行拍照进行反馈,以此来判断播种率,同时播种时,通过机械手臂2带动吸盘平台71进行移动,从而带动吸料机构74对苗盘5上的种子进行吸取,在吸取后机械手臂2在带动种子进行播种。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种农业机器人播种机技术
- 一种基于数控机床技术的农业机器人