粒子捕获设备及粒子捕获方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及粒子捕获设备及粒子捕获方法。
本申请基于在2018年11月2日向日本提出申请的日本特愿2018-207706号主张优先权,将其内容援引于此。
背景技术
存在捕获细胞等粒子而网罗地进行分析的需求。例如在专利文献1中公开了具备可捕获细胞的膜和从下方对膜进行支承的支承结构的设备。
现有技术文献
专利文献
专利文献1:美国专利第9638636号说明书
发明内容
发明要解决的课题
但是,有时因膜的自重、原材的性质等而使膜发生挠曲。若膜发生挠曲,则在显微镜下观察已捕获的粒子的情况下,会因挠曲的影响而失焦。
鉴于以上所述的情况,本发明的目的在于提供能够抑制在观察已捕获的粒子时失焦的情况的粒子捕获设备及粒子捕获方法。
用于解决课题的手段
本发明的一个方式的粒子捕获设备,其特征在于,包含:基板;可捕获粒子的粒子捕获膜;和支承体,其在对前述粒子捕获膜赋予了张力的状态下支承前述粒子捕获膜,以使前述粒子捕获膜与前述基板平行、且在前述粒子捕获膜与前述基板之间形成空间。
根据该构成,由于对粒子捕获膜赋予张力,以使粒子捕获膜与基板平行、且在粒子捕获膜与基板之间形成空间,因此能够抑制粒子捕获膜发生挠曲。因此,能够抑制在观察已捕获的粒子时失焦的情况。而且,在不具有用于防止挠曲的支承结构的情况下,能够尽可能地增大用于捕获粒子的有效区域。而且,能够抑制粒子附着在支承结构上。而且,能够降低在图像解析时粒子被误识别的可能性。
在上述的粒子捕获设备中,可以还具备使前述基板与前述支承体嵌合的嵌合结构,以对前述粒子捕获膜赋予前述张力。
根据该构成,能够以利用了嵌合结构的简单的构成来抑制粒子捕获膜发生挠曲。
在上述的粒子捕获设备中,前述嵌合结构可以具备设置于前述基板的凸部、和设置于前述支承体、且与前述凸部嵌合的凹部。
根据该构成,能够以利用了凸部及凹部的简单的构成来抑制粒子捕获膜发生挠曲。而且,与嵌合结构具备设置于支承体的凸部、和设置于基板的凹部的情况相比,更容易制作粒子捕获设备。
在上述的粒子捕获设备中,可以还具备使前述支承体扩张的扩张部件以对前述粒子捕获膜赋予前述张力。
根据该构成,能够以利用了扩张部件的简单的构成来抑制粒子捕获膜发生挠曲。
在上述的粒子捕获设备中,可以还具备使前述粒子捕获膜扩张的膜扩张部件以对前述粒子捕获膜赋予前述张力。
根据该构成,能够以利用了膜扩张部件的简单的构成来抑制粒子捕获膜发生挠曲。
在上述的粒子捕获设备中,可以还具备倾斜支承部件,所述倾斜支承部件在使前述支承体相对于前述基板倾斜的状态下支承前述支承体,以对前述粒子捕获膜赋予前述张力。
根据该构成,能够以利用了倾斜支承部件的简单的构成来抑制粒子捕获膜发生挠曲。
在上述的粒子捕获设备中,可以还具备液体吸水性溶胀部件,所述液体吸水性溶胀部件通过与前述支承体结合并吸收液体而增大体积,以对前述粒子捕获膜赋予前述张力。
根据该构成,能够以利用了液体吸水性溶胀部件的简单的构成来抑制粒子捕获膜发生挠曲。
在上述的粒子捕获设备中,前述粒子捕获膜可以具有:捕获部,其具有可捕获1个前述粒子的大小;和连通孔,其具有不能供1个前述粒子通过的大小、且将前述捕获部与前述空间连通。
根据该构成,能够通过捕获部来捕获1个粒子、并且能够使粒子的分散液穿过连通孔而进行流通。
在上述粒子捕获设备中,前述粒子捕获膜可以具备:具有前述连通孔的第一层;和具有贯通孔的第二层,所述贯通孔与前述连通孔相连且大小与前述捕获部的外形相同。与在单一的层中设置捕获部及连通孔的情况相比,更容易制作粒子捕获设备。
在上述的粒子捕获设备中,前述空间可以被液体充满。
根据该构成,即使在粒子捕获膜浸渍于液体的情况下,也可对粒子捕获膜赋予前述张力,因此能够抑制因粒子捕获膜的溶胀、液体的重量、表面张力的影响等而使粒子捕获膜发生挠曲。
本发明的一个方式的粒子捕获方法,其特征在于,准备基板、可捕获粒子的粒子捕获膜和支承前述粒子捕获膜的支承体,对前述粒子捕获膜赋予张力,以使前述粒子捕获膜与前述基板平行、且在前述粒子捕获膜与前述基板之间形成空间。
根据该方法,由于对粒子捕获膜赋予张力,以使粒子捕获膜与基板平行、且在粒子捕获膜与基板之间形成空间,因此能够抑制粒子捕获膜发生挠曲。因此,能够抑制在观察已捕获的粒子时失焦的情况。而且,在不具有用于防止挠曲的支承结构的情况下,能够尽可能地增大用于捕获粒子的有效区域。而且,能够抑制粒子附着于支承结构上的情况。
附图说明
图1是实施方式的粒子捕获设备的立体图。
图2是实施方式的粒子捕获设备的俯视图。
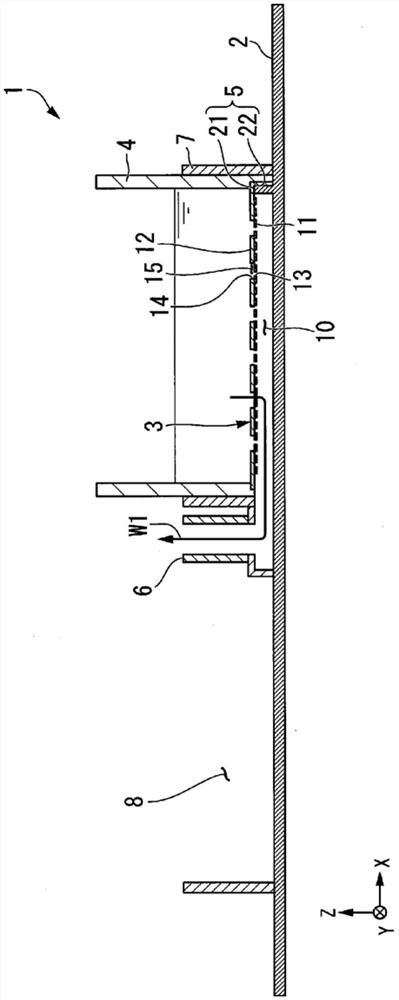
图3是包含图2的III-III截面的图。
图4是包含图2的IV-IV截面的图。
图5是表示粒子捕获设备的一例的立体图。
图6A是实施方式的粒子捕获膜的制作方法中的、基底膜的形成工序的说明图。
图6B是实施方式的粒子捕获膜的制作方法中的、第一固化性树脂膜的形成工序的说明图。
图6C是实施方式的粒子捕获膜的制作方法中的、第一层的形成工序的说明图。
图6D是实施方式的粒子捕获膜的制作方法中的、第二固化性树脂膜的形成工序的说明图。
图6E是实施方式的粒子捕获膜的制作方法中的、第二层的形成工序的说明图。
图6F是实施方式的粒子捕获膜的制作方法中的、粒子捕获膜的说明图。
图7A是实施方式的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图7B是实施方式的粒子捕获设备的制造方法中的、基板的凸部与支承体的凹部的嵌合工序的说明图。
图8是实施方式的第一变形例的粒子捕获设备的截面图。
图9A是实施方式的第一变形例的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图9B是实施方式的第一变形例的粒子捕获设备的制造方法中的、扩张部件与支承体的接合工序的说明图。
图10是实施方式的第二变形例的粒子捕获设备的截面图。
图11A是实施方式的第二变形例的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图11B是实施方式的第二变形例的粒子捕获设备的制造方法中的、膜扩张部件与支承体的接合工序的说明图。
图12是实施方式的第三变形例的粒子捕获设备的截面图。
图13A是实施方式的第三变形例的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图13B是实施方式的第三变形例的粒子捕获设备的制造方法中的、倾斜支承部件与支承体的接合工序的说明图。
图14是实施方式的第四变形例的粒子捕获设备的截面图。
图15A是实施方式的第四变形例的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图15B是实施方式的第四变形例的粒子捕获设备的制造方法中的、液体吸水性溶胀部件的膨胀工序的说明图。
图16是实施方式的第五变形例的粒子捕获设备的截面图。
图17A是实施方式的第五变形例的粒子捕获设备的制造方法中的、张力赋予工序之前的粒子捕获膜的说明图。
图17B是实施方式的第五变形例的粒子捕获设备的制造方法中的、凸部的弯曲凸部与支承体的弯曲凹部的嵌合工序的说明图。
图18A是表示对实施例的粒子捕获设备进行显微镜观察得到的结果的、粒子捕获设备的中央部的照片。
图18B是表示对实施例的粒子捕获设备进行显微镜观察得到的结果的、粒子捕获设备的边缘部的照片。
图19A是表示对比较例的粒子捕获设备进行显微镜观察得到的结果的、粒子捕获设备的中央部的照片。
图19B是表示对比较例的粒子捕获设备进行显微镜观察得到的结果的、粒子捕获设备的边缘部的照片。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。以下的说明中,设定XYZ正交坐标系,参照该XYZ正交坐标系对各部件的位置关系进行说明。将水平面内的规定方向设为X方向,将在水平面内与X方向正交的方向设为Y方向,将分别与X方向及Y方向正交的方向(即铅垂方向)设为Z方向。
<粒子捕获设备1>
图1是实施方式的粒子捕获设备1的立体图。
如图1所示,粒子捕获设备1具备基板2、粒子捕获膜3、支承体4、嵌合结构5(参照图3)及抽吸部6。粒子捕获设备1在基板2与粒子捕获膜3之间形成粒子的分散介质的流路10(空间)(参照图3)。例如粒子捕获设备1设置在与水平面平行的载置面上。图中符号7表示保持支承体4的框体,符号8表示排出分散介质等液体的废液部。
<粒子>
例如,作为捕获对象的粒子,可列举细胞、细胞块、树脂粒子、金属粒子、玻璃粒子、陶瓷粒子等。需要说明的是,捕获对象的粒子并不受这些粒子的限定。
例如粒子的直径可以为约1~500μm,也可以为约1~200μm,也可以为约1~100μm,还可以为约1~50μm。粒子的直径是指面积与粒子的投影面积相同的圆的直径。需要说明的是,粒子的直径并无特别限定。
<分散介质>
在捕获粒子时,粒子以悬浮于分散介质的状态被供给至粒子捕获设备1。图3中箭头W1表示悬浮于分散介质的状态的粒子的供给方向。
例如,作为分散介质,可列举水、缓冲液、等渗液、培养基等。需要说明的是,分散介质并无特别限定,可根据目的来适当使用。
<材质>
从容易观察粒子的观点考虑,粒子捕获设备1的材质优选为具有透明性的材质。进而,在以荧光观察作为指标来观察已捕获的粒子的情况下,优选为自发荧光少的材质。例如粒子捕获设备1的材质可以使用具有透明性且自发荧光少的材质。
在捕获作为粒子的细胞的情况下,粒子捕获设备1的材质优选为不具有细胞毒性、且细胞的粘附性低的材质。
需要说明的是,粒子捕获设备1的材质并无特别限定,可以采用各种材质。
<基板2>
如图2所示,基板2具有长方形板状。例如基板2的长边的长度为50mm~100mm。例如,基板2的短边的长度为10mm~40mm。
例如基板2的材质可以使用玻璃、聚对苯二甲酸乙二醇酯(PET)、聚甲基丙烯酸甲酯(PMMA)、聚碳酸酯(PC)、聚苯乙烯(PS)、环烯烃聚合物(COP)、环氧树脂等一般的树脂。
<粒子捕获膜3>
粒子捕获膜3是可捕获粒子的膜。如图5所示,粒子捕获膜3具备凹部15(以下称作“捕获部15”。),所述凹部15具有可捕获1个粒子的大小。粒子捕获膜3具备第一层11和第二层12。如图3所示,第一层11具有将捕获部15与流路10连通的连通孔13。连通孔13具有不能供1个粒子通过的大小。第二层12具有与连通孔13相连的贯通孔14。贯通孔14具有与捕获部15的外形相同的大小。捕获部15由第一层11的上表面(与第二层12相对的面)和第二层12的贯通孔14形成。在图4中省略了第一层11及第二层12的层叠结构、捕获部15、连通孔13等的图示。
图5中符号B表示1个粒子。在图5中,捕获部15的形状具有圆筒形。
捕获部15的形状只要是可捕获1个粒子的形状,则并无特别限定。例如捕获部15的形状可以为由多个面构成的多面体(例如长方体、六棱柱、八棱柱等),可以为倒圆台形,可以为倒棱台形(倒三棱台形、倒四棱台形、倒五棱台形、倒六棱台形、七棱以上的倒多棱台形)等,也可以为组合这些形状中的两种以上而成的形状。例如,捕获部15的形状可以是一部分为圆筒形、其余的部分为倒圆台形。例如,在捕获部15的形状为圆筒形、长方体的情况下,捕获部15的底部通常为平坦,但也可以为曲面(凸面、凹面)。
捕获部15的尺寸可以考虑欲捕获至捕获部15中的粒子的直径与捕获部15的尺寸的合适比例来适当决定。捕获部15优选被图案化并对形态、其密度等进行控制。捕获部15的形状、尺寸可以考虑应捕获至捕获部15中的粒子的种类(粒子的形状、尺寸等)而以1个捕获部15中捕获1个粒子的方式来适当决定。
为了在1个捕获部15中捕获1个粒子,捕获部15的尺寸优选如以下所示。与捕获部15的平面形状内切的最大圆的直径优选为欲捕获至捕获部15中的粒子的直径的0.5~2倍的范围,更优选为0.8~1.9倍的范围,进一步优选为0.8~1.8倍的范围。捕获部15的深度优选为欲捕获至捕获部15中的粒子的直径的0.5~4倍的范围,更优选为0.8~1.9倍的范围,进一步优选为0.8~1.8倍的范围。
例如,在欲捕获的粒子为直径约1~50μm的大致球形的情况下,粒子捕获膜3的厚度、捕获部15的数量、捕获部15的尺寸优选如以下所示。
粒子捕获膜3的厚度优选为1~100μm,更优选为10~50μm。
粒子捕获膜3所具有的捕获部15的数量优选的是每1cm
例如在捕获部15为圆筒形的情况下,捕获部15的尺寸优选直径1~100μm,更优选直径2~50μm,进一步优选直径3~25μm。捕获部15的深度优选1~100μm,更优选2~70μm,进一步优选3~50μm,特别优选4~30μm。在捕获部15的深度为1μm以上的情况下,从容易捕获粒子、实用化的观点考虑是优选的。在捕获部15的深度为100μm以下的情况下,从捕获多个粒子的风险低的观点考虑是优选的。
连通孔13的尺寸可以考虑欲捕获至捕获部15中的粒子的直径、捕获部15的尺寸、和应在连通孔13中移动的粒子的分散介质的特性等来适当决定。连通孔13优选被图案化并对形态、细孔的直径、其密度等进行控制。在对连通孔13进行控制的情况下,容易确保粒子的分散介质的透过量的均等性,故优选。连通孔13并不限定于通过图案化来制作。例如连通孔13也可以使用多孔质膜等多孔质材料来形成。
连通孔13的数量、位置、形状、大小等只要能够不使粒子通过而捕获(收纳于捕获部15的内部)、且为可供分散介质移动的大小,则并无特别限定。
例如在捕获部15为圆筒状的情况下,可以在捕获部15的底部设置多个直径比捕获部15的直径小的圆形的连通孔13。连通孔13的形状并不限于圆形。例如连通孔13的形状也可以为矩形。
例如在欲捕获的粒子为直径约1~50μm的大致球形且连通孔13为圆形的情况下,连通孔13的直径优选为10nm~20μm,更优选为50nm~15μm,进一步优选为100nm~10μm。在连通孔13为矩形的情况下,一边优选为10nm~20μm,更优选为50nm~15μm,进一步优选为100nm~10μm。
从防止破裂的观点考虑,粒子捕获膜3的材质优选使用具有柔软性的材质。例如粒子捕获膜3的材质为合成树脂等的聚合物。由于粒子捕获膜3具有捕获部15及连通孔13等微细结构,因此在粒子捕获膜3的材质为氮化硅(SiN)的情况下,在进行了薄膜化时容易破裂。与此相对,如果粒子捕获膜3的材质为聚合物,则在进行了薄膜化时不易破裂。
<流路10>
如图3所示,流路10以粒子捕获膜3的连通孔13作为流入口、并且以抽吸部6作为流出口。通过从抽吸部6抽吸分散介质,从而分散介质在流路10中朝向图3中箭头W1方向流动。
例如,在欲捕获的粒子为直径约1~50μm的大致球形的情况下,基板2与粒子捕获膜3之间的距离可以为100μm以上,可以为150μm以上,可以为200μm以上,可以为250μm以上,可以为300μm以上,可以为350μm以上。就粒子捕获设备1的性能而言,基板2与粒子捕获膜3之间的距离的上限不受限定。若考虑到粒子捕获设备1的实用性等(分散介质的使用量、进行观察的显微镜的尺寸等),则基板2与粒子捕获膜3之间的距离优选为5mm以下。
<支承体4>
支承体4在对粒子捕获膜3赋予了张力的状态下支承粒子捕获膜3,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。就粒子捕获膜3与基板2平行而言,考虑粒子捕获设备1的制造偏差及尺寸公差等,包括粒子捕获膜3与基板2实质上平行的情况。
支承体4具有矩形框状。需要说明的是,支承体4的形状只要是支承粒子捕获膜3的形状,则并无特别限定。
例如,支承体4的材质可以使用与基板2同样的树脂。粒子捕获膜3与基板2之间的空间10成为粒子的分散介质流通的流路10。空间10被分散介质(液体)充满。
<嵌合结构5>
嵌合结构5使基板2与支承体4嵌合以对粒子捕获膜3赋予前述张力。嵌合结构5具备相互嵌合的凸部21及凹部22。嵌合结构5设置在基板2与支承体4之间。
凸部21设置在基板2上。凸部21从基板2的上表面向上方突出。例如凸部21由与基板2相同的部件一体地形成。
凹部22设置在支承体4的下部内侧。例如将凸部21与粒子捕获膜3一起压入支承体4的凹部22。由此,可以在对粒子捕获膜3赋予了前述张力的状态下支承粒子捕获膜3。
<粒子捕获设备1的制造方法>
粒子捕获设备1的制造方法包括:准备基板2、粒子捕获膜3及支承体4的预备工序;和对粒子捕获膜3赋予张力的张力赋予工序。
从形成可捕获1个粒子的大小的捕获部15及可供分散介质移动的大小的连通孔13的观点考虑,粒子捕获设备1的材质优选为使用易于微细加工的固化性树脂组合物(以下也称作“感光性树脂组合物”。)进行聚合而成的材料。
作为固化性树脂组合物,优选具有通过照射紫外线等活性能量射线而进行交联并固化的性质、并且在负型光致抗蚀剂、负型干膜抗蚀剂、具有微细结构的微小树脂成型等中使用的固化性树脂组合物。以下,也将利用光刻法使固化性树脂组合物固化成所期望的形状而成的固化物称作树脂图案。
将固化性树脂组合物用作微小树脂成型等用途的情况下,首先,将固化性树脂组合物涂布于形成树脂图案的基材的表面,并使固化性树脂组合物中所含的溶剂成分挥发,从而制作树脂膜。接着,在该树脂膜的表面载置光掩模(其形状为所要形成的图案),照射紫外线等活性能量射线。然后,经过显影工序及根据需要的后烘烤工序,由此在基材的表面形成树脂图案。可以将该树脂图案用于本实施方式的粒子捕获设备1中。
作为这样的固化性树脂组合物,例如,可以采用微小树脂成型中通常使用的下述树脂组合物:包含环氧官能性Novolac树脂、三芳基锍等阳离子系光聚合引发剂、和能够与环氧官能团反应的稀释剂、且完全固化后成为不易剥离的树脂的光固化性组合物;包含多官能性双酚A甲醛-Novolac树脂、作为产酸剂的三苯基锍六氟锑酸盐、和溶剂PGMEA、且成为可形成厚膜的树脂的光固化性组合物;等等。
进而,若将环氧树脂与特定产酸剂组合而制备固化性树脂组合物、并使用该固化性树脂组合物来形成树脂图案,则能够形成高敏感度、加热固化时的体积收缩小、且长宽比高的形状的树脂图案。
此外,对于本领域技术人员而言,当然能够理解:关于固化性树脂组合物的详细情况,能够基于日本特开2008-180877号公报、日本特开2011-111588号公报等中记载的本领域技术人员已知的方法来实施。
<预备工序>
预备工序包括粒子捕获膜制作工序、基板制作工序及支承体制作工序。
粒子捕获膜制作工序包括形成第一层11的第一层形成工序和形成第二层12的第二层形成工序。
在第一层形成工序中,在支承板31上形成可溶解的基底膜32(参照图6A)。接着,在基底膜32上涂布第一固化性树脂组合物,形成第一固化性树脂膜33(参照图6B)。接着,将第一固化性树脂膜33曝光后进行显影,由此形成具有连通孔13图案的第一层11(参照图6C)。
需要说明的是,在第一层形成工序中,可以在支承板31上不形成基底膜32而直接涂布第一固化性树脂组合物来形成第一固化性树脂膜33。
例如,作为支承板31,可列举硅晶圆、铜、铬、铁、铝等金属制的基板、玻璃基板等。作为第一固化性树脂组合物,可列举上述的感光性树脂组合物。
例如,作为基底膜32,可以使用聚乙烯醇树脂、糊精、明胶、动物胶、酪蛋白、虫胶、阿拉伯胶、淀粉、蛋白质、聚丙烯酰胺、聚丙烯酸钠、聚乙烯基甲基醚、苯乙烯系弹性体、甲基乙烯基醚与马来酸酐的共聚物、乙酸乙烯酯与衣康酸的共聚物、聚乙烯吡咯烷酮、乙酰基纤维素、羟乙基纤维素、海藻酸钠等。这些材料可以为可溶于同种液体中的多种材料的组合。例如,从基底膜32的强度、柔软性的观点考虑,基底膜32的材料可以包含甘露聚糖、黄原胶、或瓜尔胶等橡胶成分。
连通孔13的图案化方法不限于曝光·显影,也可以采用压印法、使用了定向自组装(Directed Self Assembly,DSA)技术的方法等。另外,第一固化性树脂膜33的固化方法可以不为曝光而采用已知的方法。
在第二层形成工序中,在第一层11上涂布第二固化性树脂组合物而形成第二固化性树脂膜34(参照图6D)。接着,将第二固化性树脂膜34曝光后进行显影,由此形成具有贯通孔14(捕获部15)图案的第二层12(参照图6E)。
作为第二固化性树脂组合物,可列举上述感光性树脂组合物。
捕获部15的图案化方法不限于曝光·显影,也可以采用压印法、使用了定向自组装(Directed Self Assembly,DSA)技术的方法等。另外,第二固化性树脂组合物的固化方法可以不为曝光而采用已知的方法。
在第二层形成工序之后,溶解基底膜32,从支承板31剥离第一层11。
例如,通过连同支承板31一起浸渍于剥离剂,从而溶解基底膜32,从支承板31剥离第一层11。由此,得到粒子捕获膜3(参照图6F)。需要说明的是,可以在第二层形成工序之后溶解支承板31本身。可以在从支承板31剥离第一层11之前将支承体4与粒子捕获膜3接合。
在基板制作工序中,在基板2上形成能够与支承体4的凹部22嵌合的凸部21。例如,在基板制作工序中,利用注射成型在基板2上形成凸部21。
在基板制作工序中,可以在基板2上形成柱体25。例如,在基板制作工序中,利用注射成型在基板2上形成柱体25。需要说明的是,柱体图案的形成可以用与凸部21的形成同样的工序来进行。柱体图案22的形成是任意的,也可以不存在本工序。
在支承体制作工序中,在支承体4中与基板2相对的部分(支承体4的下部)形成与基板2的凸部21嵌合的凹部22。例如,在支承体制作工序中,利用注射成型在支承体4中与基板2相对的面(支承体4的下表面)的内侧(支承体4的下部内侧)形成凹部22。
<张力赋予工序>
在张力赋予工序中,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10的方式,对粒子捕获膜3赋予张力(参照图7A及图7B)。在图7A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。
在张力赋予工序中,使基板2与支承体4嵌合,以对粒子捕获膜3赋予前述张力。例如,张力赋予工序具有:将粒子捕获膜3与支承体4接合的膜接合工序(参照图7A);和在膜接合工序之后使接合有粒子捕获膜3的支承体4与基板2嵌合的嵌合工序。具体而言,在嵌合工序中,使设置于接合有粒子捕获膜3的支承体4上的凹部22与设置于基板2上的凸部21嵌合(参照图7B)。例如,通过将凸部21与粒子捕获膜3一起压入支承体4的凹部22,从而可以在对粒子捕获膜3赋予了前述张力的状态下支承粒子捕获膜3。
由此,可以在对粒子捕获膜3赋予了前述张力的状态下将基板2、粒子捕获膜3及支承体4接合。例如可以将前述固化性树脂组合物用作粘接剂。
<粒子捕获方法>
在实施方式中,本发明提供下述的粒子捕获方法:准备基板2、可捕获粒子的粒子捕获膜3、和支承粒子捕获膜3的支承体4,对粒子捕获膜3赋予张力,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。实施方式的粒子捕获方法可以改称为:包括准备基板2、粒子捕获膜3及支承体4的预备工序和对粒子捕获膜3赋予张力的张力赋予工序的方法;包括预备工序和张力赋予工序的粒子捕获设备1的制造方法等。
如以上所述,根据本实施方式,粒子捕获设备1通过包含基板2、可捕获粒子的粒子捕获膜3和在对粒子捕获膜3赋予了张力的状态下支承粒子捕获膜3的支承体4以使粒子捕获膜3与前述基板2平行、且在粒子捕获膜3与基板2之间形成空间10,从而发挥以下的效果。
根据该构成,由于对粒子捕获膜3赋予张力以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10,因此能够抑制粒子捕获膜3挠曲的情况。因此,能够抑制在观察已捕获的粒子时失焦的情况。而且,在不具有用于防止挠曲的支承结构的情况下,能够尽可能地增大用于捕获粒子的有效区域。而且,能够抑制粒子附着于支承结构上的情况。而且,能够降低在图像解析时粒子被误识别的可能性。
在上述的粒子捕获设备1中,通过具备使基板2与支承体4嵌合的嵌合结构5以对粒子捕获膜3赋予前述张力,从而发挥以下的效果。
根据该构成,能够以利用了嵌合结构5的简单的构成来抑制粒子捕获膜3发生挠曲。
在上述的粒子捕获设备1中,嵌合结构5通过具备设置于基板2上的凸部21和设置于支承体4上且与凸部21嵌合的凹部22,从而发挥以下的效果。
根据该构成,能够以利用了凸部21及凹部22的简单的构成来抑制粒子捕获膜3发生挠曲。而且,与嵌合结构5具备设置于支承体4上的凸部21和设置于基板2上的凹部22的情况相比,更容易制作粒子捕获设备1。
在上述的粒子捕获设备1中,粒子捕获膜3通过具备具有可捕获1个粒子的大小的捕获部15、和具有不能供1个粒子通过的大小且将捕获部15与空间10连通的连通孔13,从而发挥以下的效果。
根据该构成,能够通过捕获部15来捕获1个粒子、并且能够使粒子的分散液穿过连通孔13而进行流通。
在上述的粒子捕获设备1中,粒子捕获膜3通过具备具有连通孔13的第一层11、和具有与连通孔13相连且大小与捕获部15的外形相同的贯通孔14的第二层12,从而发挥以下的效果。
根据该构成,与在单一层中设置捕获部15及连通孔13的情况相比,更容易制作粒子捕获设备1。
在上述的粒子捕获设备1中,空间10被液体充满,从而发挥以下的效果。
根据该构成,即使在粒子捕获膜3浸渍于液体的情况下,也可对粒子捕获膜3赋予前述张力,因此能够抑制因粒子捕获膜3的溶胀、液体的重量、表面张力的影响等而使粒子捕获膜3发生挠曲。
<第一变形例>
接下来,使用图8、图9A及图9B对实施方式的第一变形例进行说明。
在第一变形例中,相对于实施方式,用于对粒子捕获膜3赋予张力的构成尤为不同。在图8、图9A及图9B中,对与实施方式同样的构成标记同一符号,并省略其详细的说明。
图8是实施方式的第一变形例的粒子捕获设备101的截面图。图8是相当于图4的图。
如图8所示,粒子捕获设备101具备扩张部件120,所述扩张部件120通过与支承体4结合并压入而使支承体4扩张以对粒子捕获膜3赋予张力。扩张部件120安装于支承体4的内侧。扩张部件120从内表面扩张支承体4。扩张部件120将支承体4从内侧支承。扩张部件120的下部外表面以上端位于外侧、且下端位于内侧的方式倾斜。第一变形例的支承体4的内表面以上端位于外侧、且下端位于内侧的方式倾斜。需要说明的是,如果扩张部件120能够压入,则扩张部件120的外表面可以不倾斜,支承体4的内表面也可以不倾斜。第一变形例的支承体4的内形在安装扩张部件120之前比扩张部件120小(参照图9A)。第一变形例的支承体4通过连结部件(未图示)与基板2连结,以使在粒子捕获膜3与基板2之间形成空间10。
在第一变形例中,在张力赋予工序中,对粒子捕获膜3赋予张力,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。在图9A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。
在张力赋予工序中,通过将扩张部件120压入接合有粒子捕获膜3的支承体4而使支承体4扩张以对粒子捕获膜3赋予前述张力。具体而言,通过将扩张部件120压入支承体4,从而使扩张部件120的外表面与支承体4的内表面接合(参照图9B)。例如可以将前述固化性树脂组合物用作粘接剂。
根据本变形例,在粒子捕获设备101中,通过具备使支承体4扩张的扩张部件120以对粒子捕获膜3赋予前述张力,从而发挥以下的效果。
根据该构成,能够以利用了扩张部件120的简单的构成来抑制粒子捕获膜3发生挠曲。
<第二变形例>
接下来,用图10、图11A及图11B对实施方式的第一变形例进行说明。
在第二变形例中,相对于实施方式,用于对粒子捕获膜3赋予张力的构成尤为不同。在图10、图11A及图11B中,对与实施方式同样的构成标记同一符号,并省略其详细的说明。
图10是实施方式的第二变形例的粒子捕获设备201的截面图。图10是相当于图4的图。
如图10所示,粒子捕获设备201具备膜扩张部件220,所述膜扩张部件220通过与支承体4结合并压入而使粒子捕获膜3扩张,以对粒子捕获膜3赋予张力。膜扩张部件220安装于支承体4的内侧。膜扩张部件220从内表面扩张粒子捕获膜3。膜扩张部件220将支承体4从内侧支承。膜扩张部件220的截面形状具有L字状。需要说明的是,如果能够将支承体4从内侧支承,则膜扩张部件220的截面形状可以不具有L字状。
膜扩张部件220的下部外表面具有可扩张粒子捕获膜3的外形。第二变形例的支承体4的内形在安装膜扩张部件220之前比膜扩张部件220小(参照图11A)。需要说明的是,如果膜扩张部件220能够支承,则支承体4的内形可以比膜扩张部件220小。另外,如果能够扩张粒子捕获膜3,则支承体4的内形可以不比膜扩张部件220小。
第二变形例的支承体4的高度比膜扩张部件220的下部外表面的高度低。第二变形例的支承体4通过连结部件(未图示)与基板2连结,以使在粒子捕获膜3与基板2之间形成空间10。
在第二变形例中,在张力赋予工序中,对粒子捕获膜3赋予张力,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。在图11A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。
在张力赋予工序中,通过将膜扩张部件220压入接合有粒子捕获膜3的支承体4而扩张粒子捕获膜3,以对粒子捕获膜3赋予前述张力。具体而言,通过将膜扩张部件220压入支承体4,从而使膜扩张部件220的外表面与支承体4的内表面接合(参照图11B)。在第二变形例中,使膜扩张部件220的下端部从支承体4的下表面向下方突出(参照图11B)。例如可以将前述固化性树脂组合物用作粘接剂。
根据本变形例,在粒子捕获设备201中,通过具备使粒子捕获膜3扩张的膜扩张部件220,以对粒子捕获膜3赋予前述张力,从而发挥以下的效果。
根据该构成,能够以利用了膜扩张部件220的简单的构成来抑制粒子捕获膜3发生挠曲。
<第三变形例>
接下来,用图12、图13A及图13B对实施方式的第三变形例进行说明。
在第三变形例中,相对于实施方式,用于对粒子捕获膜3赋予张力的构成尤为不同。在图12、图13A及图13B中,对与实施方式同样的构成标记同一符号,省略其详细的说明。
图12是实施方式的第三变形例的粒子捕获设备301的截面图。图12是相当于图4的图。
如图12所示,粒子捕获设备301具有倾斜支承部件320,所述倾斜支承部件320在使支承体4相对于基板2倾斜的状态下将支承体4支承,以对粒子捕获膜3赋予张力。倾斜支承部件320的内表面相对于铅垂线(基板2的一面的垂线)倾斜。倾斜支承部件320将支承体4从外侧支承。倾斜支承部件320的内表面以上端位于内侧且下端位于外侧的方式倾斜。第三变形例的支承体4不具有凹部22(参照图4)。
在第三变形例中,在张力赋予工序中,对粒子捕获膜3赋予张力,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。在图13A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。
在张力赋予工序中,在使支承体4相对于基板2倾斜的状态下使支承体4支承于倾斜支承部件320,以对粒子捕获膜3赋予前述张力。具体而言,使支承体4的外表面与固定于基板2的倾斜支承部件320的内表面接合(参照图13B)。例如可以将前述固化性树脂组合物用作粘接剂。
根据本变形例,在粒子捕获设备301中,通过具备倾斜支承部件320,所述倾斜支承部件320在使支承体4相对于基板2倾斜的状态下对支承体4进行支承以对粒子捕获膜3赋予前述张力,从而发挥以下的效果。
根据该构成,能够以利用了倾斜支承部件320的简单的构成来抑制粒子捕获膜3发生挠曲。
<第四变形例>
接下来,用图14、图15A及图15B对实施方式的第四变形例进行说明。
在第四变形例中,相对于实施方式,用于对粒子捕获膜3赋予张力的构成尤为不同。在图14、图15A及图15B中,对与实施方式同样的构成标记同一符号,并省略其详细的说明。
图14是实施方式的第四变形例的粒子捕获设备401的截面图。图14是相当于图4的图。
如图14所示,粒子捕获设备401具备液体吸水性溶胀部件420,所述液体吸水性溶胀部件420通过与支承体4结合并吸收液体而增大体积,以对粒子捕获膜3赋予张力。液体吸水性溶胀部件420安装于支承体4的下部外侧的凹部422。例如,作为液体吸水性溶胀部件420的材质,可列举水溶胀橡胶、聚氨酯、聚乙烯醇等。需要说明的是,液体吸水性溶胀部件420的材质并无特别限定,只要具有通过吸收液体而增大体积的性质,则可以采用各种材质。第四变形例的支承体4通过连结部件(未图示)与基板2连结,以使在粒子捕获膜3与基板2之间形成空间10。
在第四变形例中,在张力赋予工序中,通过使液体吸水性溶胀部件420吸收液体而增大液体吸水性溶胀部件420的体积,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。在图15A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。在张力赋予工序之前,液体吸水性溶胀部件420进入至支承体4的下部外侧的凹部422内。
在张力赋予工序中,通过使液体吸水性溶胀部件420吸收液体而增大液体吸水性溶胀部件420的体积,以对粒子捕获膜3赋予前述张力。具体而言,通过使液体吸水性溶胀部件420吸收液体,从而使液体吸水性溶胀部件420膨胀至支承体4的下部外侧的凹部422外(参照图15B)。
根据本变形例,在粒子捕获设备401中,具备液体吸水性溶胀部件420,所述液体吸水性溶胀部件420通过与支承体4结合并吸收液体而增大体积,以对粒子捕获膜3赋予前述张力,由此发挥以下的效果。
根据该构成,能够以利用了液体吸水性溶胀部件420的简单的构成来抑制粒子捕获膜3发生挠曲。
<第五变形例>
接下来,用图16、图17A及图17B对实施方式的第五变形例进行说明。
在第五变形例中,相对于实施方式,用于对粒子捕获膜3赋予张力的构成尤为不同。在图16、图17A及图17B中,对与实施方式同样的构成标记同一符号,并省略其详细的说明。
图16是实施方式的第五变形例的粒子捕获设备501的截面图。图16是相当于图4的图。
如图16所示,粒子捕获设备501具备使基板2与支承体4嵌合的嵌合结构505以对粒子捕获膜3赋予张力。嵌合结构505具备相互嵌合的弯曲凸部521及弯曲凹部522。嵌合结构505设置在基板2(设置于基板2的凸部21)与支承体4之间。
弯曲凸部521设置于基板2的凸部21。弯曲凸部521从凸部21的上表面向上方突出。弯曲凸部521具有向上方凸起的弯曲形状。例如,弯曲凸部521由与凸部21同样的部件一体地形成。
弯曲凹部522设置于支承体4的下表面。弯曲凹部522具有沿着弯曲凸部521的弯曲形状。
在第五变形例中,在张力赋予工序中,对粒子捕获膜3赋予张力,以使粒子捕获膜3与基板2平行、且在粒子捕获膜3与基板2之间形成空间10。在图17A中夸张显示了张力赋予工序之前的粒子捕获膜3的挠曲,但是并不限定于此。在张力赋予工序之前,粒子捕获膜3可以不具有挠曲。
在张力赋予工序中,使凸部21与支承体4嵌合,以对粒子捕获膜3赋予前述张力。具体而言,使设置于支承体4的弯曲凹部522连同粒子捕获膜3一起与设置于凸部21的弯曲凸部521嵌合(参照图17B)。例如,通过将弯曲凸部521与粒子捕获膜3一起压入支承体4的弯曲凹部522,从而可以在对粒子捕获膜3赋予了前述张力的状态下支承粒子捕获膜3。由此,可以在对粒子捕获膜3赋予了前述张力的状态下将凸部21、粒子捕获膜3及支承体4接合。例如可以将前述固化性树脂组合物用作粘接剂。
根据本变形例,在粒子捕获设备501中,嵌合结构505通过具备设置于基板2的凸部21的弯曲凸部521、和设置于支承体4且与弯曲凸部521嵌合的弯曲凹部522,从而发挥以下的效果。
根据该构成,能够以利用了弯曲凸部521及弯曲凹部522的简单的构成来抑制粒子捕获膜3发生挠曲。
<其他变形例>
需要说明的是,在上述的例子中所示的各构成部件的诸多形状、组合等为一例,能够基于设计要求等进行各种变更。
例如,在上述实施方式中,嵌合结构具备设置于基板2的凸部、和设置于支承体4且与凸部嵌合的凹部,但是并不限定于此。例如,嵌合结构可以具备设置于支承体4的凸部和设置于基板2的凹部。
在上述实施方式中,粒子捕获膜3具备具有连通孔13的第一层11、和具有与连通孔13相连且大小与捕获部15的外形相同的贯通孔14的第二层12,但是并不限定于此。例如粒子捕获膜3可以是具有捕获部15及连通孔13的单一层。
在上述实施方式中,空间10被液体充满,但是并不限定于此。例如空间10也可以不被液体充满。
需要说明的是,在上述中作为实施方式或其变形例而记载的各构成要素可以在不脱离本发明的主旨的范围内进行适当组合,另外,也可以适当不使用所组合的多个构成要素中的一部分构成要素。
实施例
以下,利用实施例对本发明进行更具体地说明,但是本发明并不限定于以下的实施例。
[实施例]
(粒子捕获膜的制造)
《连通孔图案化》
用旋涂机(1500rpm、20秒)在硅基板上涂布基底剂,利用热板于90℃预烘烤1分钟、于150℃预烘烤1分钟,形成基底膜。
用旋涂机(1500rpm、20秒)在前述基底膜上涂布感光性树脂组合物(参见日本特开2008-180877号公报、日本特开2011-111588号公报。),利用热板于60℃预烘烤2分钟。然后,使用i射线步进器(型号“NSR―2205i14E”、尼康制)进行图案曝光(GHI射线、150mJ),利用热板于90℃曝光3分钟后进行加热。然后,利用使用了丙二醇单甲基醚乙酸酯(PGMEA)的浸渍法,进行30秒的显影处理。接着,使用烘箱将显影后的树脂图案连同基板一起于120℃进行1分钟后烘烤,得到直径为2μm的圆筒状的连通孔树脂图案。
《凹部图案化》
用旋涂机(1100rpm、60秒)在上述得到的连通孔树脂图案上涂布上述感光性树脂组合物,利用热板于60℃预烘烤2分钟、于120℃预烘烤3分钟。然后,使用i射线步进器(型号“NSR―2205i14E”、尼康制)进行图案曝光(GHI线、60mJ),利用热板于120℃进行3分钟曝光后加热。然后,利用使用了PGMEA的浸渍法,进行2分钟的显影处理。接着,使用烘箱将显影后的树脂图案连同基板一起于180℃进行15分钟后烘烤,得到凹部图案。凹部设为对边的距离为25μm的正六边形形状。
(粒子捕获膜的剥离)
将上述得到的形成有凹部图案的粒子捕获膜浸渍于剥离剂,溶解上述基底膜,由此从硅基板剥离在连通孔树脂图案上形成有凹部图案的粒子捕获膜。
(基板的制造)
基板是使用热塑性树脂并利用注射成型来形成的。
(支承体的制造)
支承体是使用光固化性树脂并利用光造形来形成的。支承体以支承体的内表面的上端位于外侧、且支承体的内表面的下端位于内侧的方式倾斜。
(扩张部件的制造)
扩张部件是使用光固化性树脂并利用光造形来形成的。扩张部件以使扩张部件的下部外表面的上端位于外侧、且支承体的内表面的下端位于内侧的方式倾斜。扩张部件的下部的外形比支承体的内形大。
(粒子捕获膜及基板的接合)
在上述得到的粒子捕获膜上以使凹部开口的面成为上表面的方式用粘接剂接合支承体。通过将扩张部件压入接合有粒子捕获膜的支承体,从而将支承粒子捕获膜的支承体扩张。由此,在对粒子捕获膜赋予了张力的状态下使支承体支承粒子捕获膜。支承体是以使凹部开口的面的相反侧的面(另一面)与基板相对、且在粒子捕获膜与基板之间形成空间的方式使用固化性树脂组合物连结于基板的。由此,得到图8所示形状(第一变形例的形状)的实施例的粒子捕获设备。
[比较例]
除了将扩张部件压入接合有粒子捕获膜的支承体以外,与实施例同样地制作比较例的粒子捕获设备。比较例的粒子捕获设备不具有扩张部件。
(粒子捕获膜及基板的接合)
在上述得到的粒子捕获膜上以使凹部开口的面成为上表面的方式用粘接剂接合支承体。支承体是以使凹部开口的面的相反侧的面(另一面)与基板相对、且在粒子捕获膜与基板之间形成空间的方式使用固化性树脂组合物连结于基板的。
由此,得到比较例的粒子捕获设备。
[实验例]
向实施例、比较例的各个粒子捕获设备中添加磷酸缓冲生理食盐水,从抽吸部进行抽吸,由此充满粒子捕获膜的上部以及粒子捕获膜与基板之间的流路内。接着,用倒立型显微镜(KEYENCE制、BZ-9000),使用倍率为20倍的相位差物镜,聚集至粒子捕获设备的中央部,对图像进行了拍摄。然后,不修正焦点而拍摄粒子捕获设备的边缘部的图像。
图18A及图18B是表示对实施例的粒子捕获设备进行显微镜观察得到的结果的照片。图18A是粒子捕获设备的中央部的照片。图18B是粒子捕获设备的边缘部的照片。
图19A及图19B是表示对比较例的粒子捕获设备进行显微镜观察得到的结果的照片。图19A是粒子捕获设备的中央部的照片。图19B是粒子捕获设备的边缘部的照片。
如图19A及图19B所示,在比较例的粒子捕获设备中,若在聚焦至中央部后进行边缘部的拍摄,则因粒子捕获膜的挠曲的影响而失焦。
与此相对,如图18A及图19B所示,在实施例的粒子捕获设备中,可确认到能够抑制粒子捕获膜的挠曲、并且能够抑制失焦。
以上,对本发明的优选实施例进行了说明,但是本发明并不限定于这些实施例。可以在不脱离本发明的主旨的范围内进行构成的增加、省略、置换及其他变更。本发明并不受前述的说明限定,仅受到随附的权利要求的范围限定。
附图标记说明
1、101、201、301、401、501…粒子捕获设备,2…基板,3…粒子捕获膜,4…支承体,5…嵌合结构,10…流路(空间),11…第一层,12…第二层,13…连通孔,14…贯通孔,15…凹部(捕获部),21…凸部,22…凹部,120…扩张部件,220…膜扩张部件,320…倾斜支承部件,420…液体吸水性溶胀部件,B…粒子
- 单一粒子捕获装置、单一粒子捕获系统及单一粒子的捕获方法
- 去除煤尘、细小的灰尘和废气粒子的方法、用于这种方法的粒子捕获装置和使用该粒子捕获装置产生静电场的用途