检测铁电信号的方法和压电式力显微镜设备
文献发布时间:2023-06-19 11:47:31
技术领域
在本发明的实施例中阐述的技术大体来说涉及显微镜,且更具体来说,涉及检测铁电信号的方法和压电式力显微镜设备。
背景技术
扫描探针显微镜(Scanning probe microscope,SPM)是测量呈纳米尺度的样本的表面构形的仪器。SPM具有不同变化形式,包含广泛使用的压电响应力显微镜(piezo-response force microscopy,PFM)。
当样本的表面与悬臂支架的探针尖端之间存在较大静电力时,PFM可能无法遵循样本的真正构形。因而,区分真FE信号与静电力假信号(例如,非FE信号)以改良PFM的性能非常重要。由于对呈纳米尺度的更佳测量性能的需求,因此对用于解决上述问题的更先进PFM和创新技术的需求持续增长。
发明内容
本发明实施例提供一种适用于压电式力显微镜设备的检测来自铁电膜的铁电信号的方法,包括:产生输入波形信号,其中所述输入波形信号包含具有不同电压电平的多个读取电压步骤;将所述输入波形信号施加到所述铁电膜;通过所述压电式力显微镜设备的原子力显微镜探针来对所述铁电膜的表面进行扫描以测量所述铁电膜的表面构形;在将所述输入波形信号施加到所述铁电膜的像素时检测所述原子力显微镜探针的偏转,以产生偏转信号;基于所述偏转信号来产生所述像素的频谱数据;以及分析所述像素的所述频谱数据以确定所述像素的所述频谱数据是铁电信号还是非铁电信号。
本发明实施例提供一种压电式力显微镜设备,包括:波形产生器,配置成产生输入波形信号,其中所述输入波形信号包含具有不同电压电平的多个读取电压步骤;原子力显微镜探针,配置成对铁电膜的表面进行扫描以测量所述铁电膜的表面构形;检测器,配置成在将所述输入波形信号施加到所述铁电膜的像素时检测所述原子力显微镜探针的偏转以产生偏转信号,其中所述偏转信号用于产生所述像素的频谱数据;以及处理器,配置成分析所述像素的所述频谱数据以确定所述像素的所述频谱数据是铁电信号还是非铁电信号。
本发明实施例提供一种适用于压电式力显微镜设备的检测铁电信号的方法,包括:产生输入波形信号,其中所述输入波形信号包含具有不同电压电平的多个读取电压步骤;将所述输入波形信号施加到铁电膜;响应于将所述输入波形信号施加到所述铁电膜的像素来检测原子力显微镜探针的偏转,以产生偏转信号;基于所述偏转信号和所述输入波形信号来产生所述像素的频谱数据;以及通过机器学习算法来分析所述像素的所述频谱数据以确定所述像素的所述频谱数据是铁电信号还是非铁电信号。
附图说明
当结合附图阅读时,从以下详细描述中最好地理解本公开的各个方面。应注意,根据行业中的标准惯例,各个特征未按比例绘制。实际上,为了论述清楚起见,可任意增大或减小各个特征的尺寸。
图1是示出根据一些实施例的PFM设备的示意图。
图2A到图2C是示出根据一些实施例的输入波形信号的波形图。
图2D示出了示出根据一些实施例的AFM探针相对于写入电压的探针位移的示意图。
图3A到图3B示出根据一些实施例的输入波形信号中的序列。
图4到图5示出根据一些实施例的输入波形信号的序列。
图6示出根据一些实施例的记录铁电膜中的像素区域的频谱数据的映射阵列。
图7是示出根据一些实施例的PFM的操作方法的流程图。
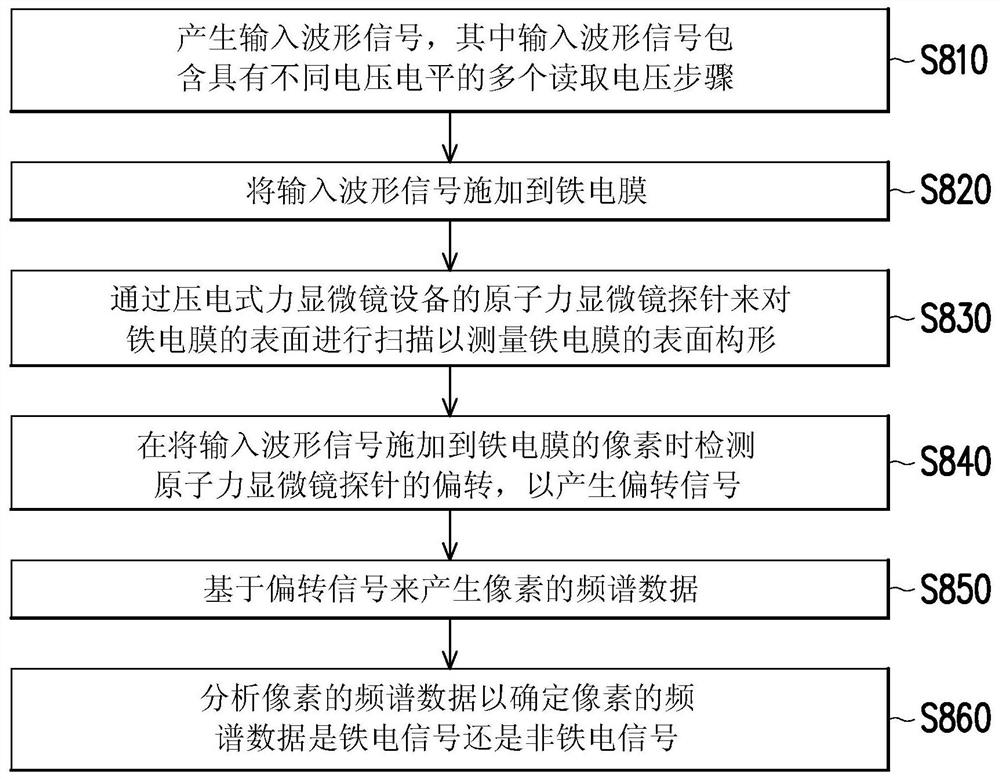
图8是示出根据一些实施例的检测来自铁电膜的铁电信号的方法的流程图。
图9A到图9C示出根据一些实施例的确定为铁电信号和非铁电信号的频谱数据。
具体实施方式
以下公开内容提供用于实施所提供主题的不同特征的多个不同实施例或实例。下文描述组件和布置的特定实例以简化本公开。当然,这些组件和布置仅仅是实例且并不旨在作为限制。举例来说,在以下描述中,在第二特征上方或在第二特征上形成第一特征可包含第一特征与第二特征直接接触地形成的实施例,且还可包含可在第一特征与第二特征之间形成额外特征从而使得第一特征与第二特征可以不直接接触的实施例。另外,本公开可在各个实例中重复附图标记和/或字母。这种重复是出于简化和清楚的目的并且本身并不规定所论述的各种实施例和/或配置之间的关系。
另外,为易于描述,本文中可使用例如“在……之下”、“在……下方”、“下部”、“在……上方”、“上部”等空间相对术语来描述如图式中所示出的一个元件或特征与另一(些)元件或特征的关系。除图中所描绘的定向外,空间相对术语还旨在涵盖器件在使用或操作中的不同定向。设备可以其它方式定向(旋转90度或处于其它定向),且本文中所使用的空间相关描述词可同样相应地作出解释。
参看图1,示出根据一些实施例的PFM设备1000。PFM 1000包含衬底1010、原子力显微镜(atomic force microscope,AFM)探针1040、压电管扫描器(piezoelectric tubescanner)1050、激光源1060、检测器1070、锁定放大器1080、控制器1120、处理器1130、波形产生器1140以及用户接口1150。衬底1010可包含用于在PFM 1000的操作期间将铁电(ferroelectric,FE)膜1020固持在适当位置中的样本固持器(未绘示)。FE膜1020可具有半导体晶片,且半导体器件安置于其上。衬底1010可更包含接收由波形产生器1140产生的输入波形信号1141的电极(未绘示)。可通过电极将所接收的输入波形信号1141供应到FE膜1020。
AFM探针1040包含探针尖端1030,所述探针尖端1030配置成对FE膜1020的表面进行扫描以读取FE膜1020的表面构形。在一些实施例中,可以多种不同模式操作PFM 1000,所述不同模式包含接触模式,其中探针尖端1030与FE膜1020的表面恒定接触;非接触模式或敲击模式,其中探针尖端1030不与FE膜1020的表面接触或仅与FE膜1020的表面间歇接触。在接触模式下,探针尖端1030在对FE膜1020进行扫描期间与FE膜1020的表面硬接触。AFM探针1040随着其遵循FE膜1020的构形而发生偏转。在一些实施例中,基于AFM探针1040在对FE膜1020的表面进行扫描时的偏转来测量FE膜1020的构形。在一些替代实施例中,连续地调整探针尖端1030以保持AFM探针1040的特定偏转,且基于探针尖端1030的调整来测量FE膜1020的构形。
激光源1060配置成在FE膜1020的扫描期间将激光束S1发射到AFM探针1040的表面(例如,背表面)。检测器1070配置成基于从AFM探针1040的表面反射的激光束S2来检测AFM探针1040的偏转。AFM探针1040的偏转是由AFM探针1040的探针尖端1030与FE膜1020的表面之间的相互作用力引起的。在一些实施例中,检测器1070是位置敏感性检测器(positionsensitive detector,PSD),其根据所反射的激光束S2来检测AFM探针140的偏转以产生偏转信号1071。偏转信号1071指示AFM探针1040的偏转。
波形产生器1140配置成产生输入波形信号1141并通过衬底1010将输入波形信号1141提供到FE膜1020。在一些实施例中,输入波形信号1141在每一测量周期中包含多个序列,其中所述序列中的每一个包含多个读取电压步骤和多个写入电压步骤。写入电压步骤配置成激励FE膜1020且读取电压步骤配置成从FE膜1020读取FE信号。在一些实施例中,写入电压步骤是输入波形信号1141的交流(alternative current,AC)分量且读取电压步骤是输入波形信号1141的直流(direct current,DC)分量。读取电压步骤具有不同的电压电平且在读取操作期间用作FE膜1020的表面与探针尖端1030之间的偏置电压。读取操作配置成测量指示FE膜1020的构形的FE信号。在一些实施例中,读取电压步骤中的每一个对应于序列中的一个,且序列的数目等于读取电压步骤的数目。
在一些实施例中,波形产生器1140配置成基于通过用户接口1150设定的用户设定参数1151来产生输入波形信号1141。用户设定参数1151可包含输入波形信号1141的设定。举例来说,用户设定参数1151可包含关于每一序列中的读取电压步骤的数目、每一序列中的写入脉冲的数目以及连续读取电压步骤之间的电压差和连续写入电压步骤之间的电压差的设定。
锁定放大器1080耦接到检测器1070以接收偏转信号1071且配置成基于偏转信号1071来捕获AFM探针1040的探针位移。具体地说,锁定放大器1080可捕获探针位移的振幅1081和相位1082。在一些实施例中,锁定放大器1080配置成从检测器1070接收偏转信号1071且从波形产生器1140接收输入波形信号1141。锁定放大器1080可捕获偏转信号1071的与输入波形信号1141同相振荡的第一分量;和偏转信号1071的垂直于输入波形信号1141的相位振荡的第二分量。换句话说,偏转信号1071的第一分量具有与输入波形信号1141相同的相位,且偏转信号1071的第二分量具有与输入波形信号1141呈90度的相位差。在一些实施例中,在与输入波形信号1141的频率相同的频率下调制偏转信号1071。因而,锁定放大器1080可基于第一分量和第二分量来输出偏转信号1071的振幅1081和相位1082。
控制器1120配置成基于从锁定放大器1080输出的探针位移的振幅1081和相位1082中的至少一个来控制压电管扫描器1050的操作。举例来说,在恒力模式下,控制器可基于偏转信号1071的振幅1081和相位1082来产生控制信号1121以将探针尖端1030的偏转维持在特定偏转下。在恒力模式下,可基于控制信号1121来产生FE膜1020的构形。在一些实施例中,控制器1120在扫描期间产生FE膜1020的每个像素的频谱数据。举例来说,频谱数据可包含AFM探针1040的探针位移。控制器1120可将每一像素的频谱数据1122提供到处理器1130以供进一步处理。
在一些实施例中,处理器1130可基于特定像素的频谱数据来将FE膜的特定像素的频谱数据分类为FE信号或非FE信号。举例来说,如果特定像素的频谱数据与图6中所绘示的图案603相匹配,那么特定数据是FE信号。否则,如果特定像素的频谱数据与图6中所绘示的图案601相匹配,那么特定数据是非FE信号。在一些实施例中,根据从如在图9A到图9C中所绘示的不同读取电压步骤获得的探针位移来确定特定单元的频谱数据是FE信号还是非FE信号。
参看图1和图2D,根据一些实施例示出相对于写入电压Vwrite的探针位移。图2D中的竖直轴指示探针位移,且图2D中的水平轴指示在探针尖端1030与FE膜1020之间偏置的写入电压Vwrite。在PFM设备1000的每一扫描序列中,以扫掠相位(trace phase)和回扫相位(retrace phase)将写入电压Vwrite施加到FE膜1020。对应于扫掠相位和回扫相位的探针位移示出为扫掠曲线Ct和回扫曲线Crt。FE膜1020的每一像素的频谱数据可包含呈扫掠相位和回扫相位的探针位移。
参看图1,为测量FE膜1020在竖直方向或横向方向上的构形,产生具有多个读取电压步骤和写入电压步骤的输入波形信号1141并将所述输入波形信号1141施加到FE膜以在探针尖端1030与FE膜1020之间形成偏置电压。压电管扫描器1050在FE膜1020的表面上方移动AFM探针1040,使得探针尖端1030可遵循FE膜1020中的像素的构形。检测器1070检测AFM探针1040在对每个像素进行扫描时的偏转以产生偏转信号1071。锁定放大器1080捕获每一像素的偏转信号1071的振幅1081和相位(或偏振)1082。在恒定高度模式下,控制器1120可基于振幅1081和相位1082中的至少一个来产生每一像素的频谱数据。在一些替代实施例中,控制器1120配置成使用控制信号1121来不断地调整AFM探针1040以将探针尖端1030维持在特定偏转(例如,恒力模式)下。对应于特定像素的调整信号形成特定像素的频谱数据。处理器可基于频谱数据1122来确定每一像素的频谱数据是FE信号还是仅具有静电电荷响应的非FE信号。
图2A到图2C示出根据一些实施例的输入波形信号2141a到输入波形信号2141c的波形。输入波形信号2141a到输入波形信号2141c可与由图1中所绘示的波形产生器1140产生的输入波形信号1141相同。参看图2A,输入波形信号2141a在每一测量周期中包含多个序列201a到序列205a。序列201a到序列205a中的每一个对应于读取电压步骤中的一个。具体地说,序列201a对应于电压电平为-V2的读取电压步骤。换句话说,在序列201a期间,电压电平为-V2的读取电压步骤用作针对FE膜的读取操作的偏置电压。类似地,用于读取操作的偏置电压在序列202a期间设定为-V1,在序列203a期间设定为V0,在序列204a期间设定为+V1,且在序列205a期间设定为+V2。
在一些实施例中,两个连续读取电压步骤的电压电平之间的差值是相同的。举例来说,电压电平-V2与电压电平-V1之间的差值与电压电平-V1与电压电平V0之间的差值相同。在一些实施例中,处理器1130可基于每一测量周期中的序列的数目和从用户接口1150输入的用户输入电压来确定电压电平-V2到电压电平+V2。举例来说,当每一测量周期具有五个序列时,可将电压电平-V2、电压电平-V1、电压电平V0、电压电平+V1以及电压电平+V2分别设定为-2伏、-1伏、0伏、1伏以及2伏。
另外,在序列201a到序列205a中的每一个期间,输入波形信号2141a可包含对应于多个写入脉冲的多个写入电压步骤。在一些实施例中,写入脉冲中的每一个的脉冲宽度是相同的,且可设定成介于2毫秒(ms)到50毫秒的范围。另外,可将两个连续电压脉冲之间的电压电平差设定为介于10毫伏(mV)到200毫伏的范围内的任何值。在一些实施例中,由用户通过用户接口1150设定写入脉冲中的每一个的脉冲宽度和两个连续电压脉冲之间的电压差。
在一些实施例中,在将写入脉冲施加到FE膜之后执行至少一个读取操作。可根据读取操作的读取时间与准确度之间的权衡来确定在施加写入脉冲之后的读取操作的数目。随着读取操作的数目增加,读取操作的处理时间更长且读取操作的准确度更佳,且反之亦然,在一些实施例中,由用户通过用户接口1150设定在写入脉冲之后执行的读取操作的数目。
图2A中的箭头203和箭头205指示输入波形信号中的读取电压步骤的斜坡方向。用户可通过图1中所绘示的用户接口1150将读取电压步骤的斜坡方向设定为从-V2到+V2的递增方向(箭头205)或从+V2到-V2的递减方向(箭头203)。
在图2A中,在每一测量周期中存在五个序列201a到序列205a,但本公开不限于每一测量周期中的任何特定数目的序列。基于测量准确度与用于测量的成本(例如,数据存储、处理时间)之间的权衡来确定测量周期中的序列201a到序列205a的数目。举例来说,每一测量周期中的更多序列可输出更准确的测量,但需要更多的数据存储和处理时间。相比之下,每一测量周期中的更少序列可输出不太准确的测量,但需要更少的数据存储和处理时间。
参看图2B,示出根据一些实施例的在每一测量周期中包含多个序列201b到序列209b的输入波形信号2141b的波形图。将输入波形信号2141b划分成序列201b到序列209b,其中序列201b到序列209b中的每一个对应于读取电压步骤-V4到读取电压步骤+V4中的一个。输入波形信号2141b与输入波形信号2141a之间的差值是输入波形信号2141b在每一测量周期中包含比输入波形信号2141a更多的序列。举例来说,输入波形信号2141b在每一测量周期中包含九个序列,而输入波形信号2141a在每一测量周期中包含五个序列。因而,输入波形信号2141b可使得PFM设备1000产生更准确的测量,但需要更多的数据存储空间和处理时间。应注意,输入波形信号2141b中的九个序列201b到序列209b和输入波形信号2141a中的五个序列201a到序列205a仅出于说明的目的。每一测量周期中的任何其它数目的序列属于本公开的范围内。在一些实施例中,根据每一测量周期中的序列的数目和从用户接口1150输入的用户输入电压来确定每一读取电压步骤的电压电平。举例来说,当用户输入电压是2且每一测量周期具有九个序列时,可将电压电平-V4到电压电平+V4分别设定为-2伏、-1.5伏、-1伏、-0.5伏、0伏、0.5伏、1伏、1.5伏以及2伏。
参看图2C,示出根据一些实施例的在每一测量周期中包含序列201c到序列209c的输入波形信号2141c的波形图。序列201c到序列209c中的每一个对应于读取电压步骤中的一个。序列201c到序列209c中的每一个在开始定时ts处开始且在结束定时te处结束,其中开始定时ts和结束定时te对应于输入波形信号2141c的最低电压电平。在序列201c到序列209c中的每一个内,存在对应于输入波形信号2141c的最高电压电平的峰值定时tp。
图2C中所绘示的输入波形信号2141c与图2B中所绘示的输入波形信号2141b之间的差值是序列中的每一个内的输入波形信号的波形。具体地说,在图2B中,输入波形信号2141b的开始定时ts和输入波形信号2141b的结束定时te对应于零伏的电压电平(例如,输入波形信号2141b与水平轴之间的交叉点)。另一方面,在图2C中,输入波形信号2141c的开始定时ts和结束定时te对应于与零伏不同的-V伏电压电平。应注意,图2A到图2C中所绘示的输入波形信号2141a到输入波形信号2141c绘示了可施加到图1中的FE膜1020以用于构形测量的一些示范性输入波形信号。从输入波形信号2141a到输入波形信号2141c推导出的输入波形信号的其它变化形式属于本公开的范围内。举例来说,通过改变每一测量周期中的序列的数目、每一序列的开始定时、结束定时或读取电压电平和写入电压电平的值产生的输入波形信号可用于PFM设备1000以测量FE膜1020的构形。
图2C进一步绘示扫描线(未绘示)的扫掠周期和回扫周期,其中在扫掠周期中输入波形信号2141c从开始定时ts处的最低电压电平(例如,-V)增大到峰值定时tp处的最高电压电平(例如,+V);且在回扫周期中输入波形信号2141c从峰值定时tp处的最高电压电平减小到结束定时te处的最低电压电平。参看图1和图2C,在将输入波形信号2141c施加到FE膜1020时,检测器1070可检测AFM探针1030的偏转以产生对应于读取电压步骤-V4到读取电压步骤V4中的每一个的偏转信号1071,且锁定放大器1080可捕获偏转信号1071的振幅1081和相位1082。偏转信号1071的相位1082可包含相对于序列201c到序列209c中的读取电压步骤-V4到读取电压步骤V4的扫掠相位和回扫相位。每一像素的频谱数据可包含偏转信号1071的扫掠相位和回扫相位。在一些实施例中,可将特定像素的频谱数据与一组预定图案进行比较以确定特定像素的频谱数据是FE信号还是非FE信号。参看图6,具有磁滞回线的频谱数据601对应于FE信号且频谱数据603对应于仅具有静电电荷响应的非FE信号。
参看图3A,示出根据一些实施例的通过图1中的波形产生器1140产生的输入波形信号的序列305。序列305在开始定时ts处开始并在结束定时te处结束。序列305包含对应于多个写入脉冲P1到写入脉冲Pn的多个写入电压步骤,其中写入脉冲P1到写入脉冲Pn中的每一个具有脉冲宽度t
在一些实施例中,将读取电压步骤Vr1到读取电压步骤Vr9布置成递增,但在一些其它实施例中,可将读取电压步骤Vr1到读取电压步骤Vr9布置成递减。参看图1、图3A以及图3B,当将具有序列305的输入波形信号施加到FE膜1020的特定像素时,将写入脉冲P1到写入脉冲Pn依序施加到FE膜1020的特定像素。在施加每一写入脉冲之后,执行多个读取操作以使用读取电压步骤Vr1到读取电压步骤Vr9作为偏置电压来从特定像素读取响应。在读取操作中的每一个期间,检测器1070检测AFM探针1040的偏转以输出对应于读取电压步骤Vr1到读取电压步骤Vr9中的每一个的偏转信号1071。锁定放大器1080捕获偏转信号1071的振幅1081和相位1082以产生特定像素的频谱数据。举例来说,特定像素的频谱数据可包含偏转信号1071相对于偏置电压的相位1082。控制器1120或处理器1130可基于特定像素的频谱数据来确定偏转信号1071是铁电信号还是非铁电信号(例如,静电力信号)。图6中所绘示的频谱数据601是FE信号的实例;且图6中所绘示的频谱数据603是仅具有静电电荷响应的非FE信号的实例。由于图3A和图3B中所绘示的序列305使PFM 1000在施加每一写入脉冲之后使用读取电压步骤Vr1到读取电压步骤Vr9执行多个读取操作,因此FE膜1020的每个像素中的频谱数据含有用于区分FE信号与非FE信号的更多信息。因此,提高确定的准确度。
参看图4,示出根据一些实施例的输入波形信号的序列405。序列405可与图2A中所绘示的序列203a和图2B中所绘示的序列205b相同。图4进一步绘示包含连续写入脉冲P1、写入脉冲P2以及写入脉冲P3的序列405的放大部分A。写入脉冲P1的电压电平比写入脉冲P2的电压电平小ΔV,且写入脉冲P2的电压电平比写入脉冲P3的电压电平小ΔV。写入脉冲P1、写入脉冲P2以及写入脉冲P3中的每一个分别后接读取集410、读取集420以及读取集430。在一些实施例中,在场开启周期(on-field period)期间施加写入脉冲P1、写入脉冲P2以及写入脉冲P3中的每一个,且在场关闭周期(off-field period)中执行读取集410、读取集420以及读取集430中的每一个,其中场开启周期与场关闭周期并未彼此交叠,且可以单独地记录场开启周期和场关闭周期的定时。因而,可记录读取集410到读取集430的信号定时,且通过执行读取集410到读取集430产生的FE信号是时间依赖性FE信号。
在一些实施例中,读取集410、读取集420以及读取集430中的每一个可包含多个连续读取操作,其中记录与读取集的每一读取操作相关联的定时。举例来说,读取集410可包含三个连续读取操作412、读取操作414以及读取操作416,所述三个连续读取操作412、读取操作414以及读取操作416在写入脉冲P1之前施加写入脉冲之后立刻执行读取,其中记录与连续读取操作412、读取操作414以及读取操作416相关联的信号定时。由于记录了与读取集中的读取操作相关联的信号定时,因此PFM(例如,图1中的PFM 1000)可在执行读取集的读取操作时输出时间依赖性FE信号。
在一些实施例中,基于时间依赖性FE信号中的噪声电平来在与每一读取集的读取操作相关联的信号定时当中选择选定信号定时。换句话说,出于使输出FE信号中的噪声最小化的目的来选择选定信号定时。举例来说,如果在读取集410的读取操作当中,读取集410的读取操作412在输出FE信号中产生最小噪声,那么与读取操作相关联的信号定时是选定信号定时。在真实操作模式下,选定信号定时用于进行读取。举例来说,当与读取操作412相关联的定时信号是选定定时信号时,真实操作模式将不执行读取集410的所有读取操作412、读取操作414以及读取操作416。实际上,真实操作模式在写入脉冲P1之前施加写入脉冲之后仅执行读取操作412。通过这种方式,减小输出FE信号的噪声电平,且减少用于读取FE膜的处理时间(例如,减小FE膜1020)。因此,确保读取的准确度和稳定性。
参看图5,示出根据一些实施例的输入波形信号的序列505和序列505的放大部分B。输入波形信号的放大部分B包含分别后接读取集510到读取集530的连续写入脉冲P1到写入脉冲P3。图5中的写入脉冲P1到写入脉冲P3和读取集510到读取集530类似于图4中的写入脉冲P1到写入脉冲P3和读取集410到读取集430,因此在下文中省略了关于写入脉冲P1到写入脉冲P3和读取集510到读取集530的详细描述。
图5中的序列505的放大部分B与图4中的序列405的放大部分A之间的差异是放大部分B更包含(在写入脉冲P2的场开启周期期间)同时执行的读取集540。换句话说,图5中的序列505可使PFM 1000在写入脉冲的场关闭周期和场开启周期两者中执行FE膜的读取操作或表面测量。
在一些实施例中,读取集510到读取集540中的每一个可包含多个连续读取操作,其中记录与每一读取集的连续读取操作相关联的信号定时。举例来说,读取集510可包含连续但以不同定时执行的读取操作512、读取操作514以及读取操作516,其中记录与读取操作512、读取操作514以及读取操作516相关联的信号定时。因此,由读取集510到读取集540中的连续读取操作输出的FE信号是时间依赖性FE信号。在一些实施例中,基于时间依赖性FE信号中的噪声电平来选择与读取集510到读取集540的读取操作相关联的信号定时当中的信号定时。举例来说,选定信号定时与在时间依赖性FE信号中输出最小噪声电平的读取操作相关联。在真实操作模式下,选定信号定时用于进行读取。通过这种方式,减小输出FE信号的噪声电平,且减少用于读取FE膜(例如,FE膜1020)的处理时间。
在一些实施例中,将通过测量产生的FE膜(例如,FE膜1020)的多个像素的频谱数据存储在映射阵列中。图6示出根据一些实施例的存储FE膜中的像素区域的频谱数据的映射阵列MA。映射阵列MA具有长度L和宽度W,所述长度L和所述宽度W可根据用户的偏好通过用户接口1150来设定。在一些实施例中,像素的频谱数据包含偏转信号相对于施加到FE膜的偏置电压的相位。参看图1和图6,当将输入波形信号1141施加到FE膜1020时,通过检测器1070检测偏转信号1071且通过锁定放大器1080捕获偏转信号1071的相位。将对应于FE膜中的像素中的每一个的相位存储在映射阵列MA的位置中。如图6中所绘示,在映射阵列MA的位置(x1,y1)处记录像素的频谱数据601,且在映射阵列MA的位置(x2,y2)处记录另一像素的频谱数据603。在一些实施例中,在位置(x1,y1)处记录的频谱数据601是被噪声(例如,静电力假信号)污染的FE信号的实例;且在位置(x2,y2)处记录的频谱数据603是仅具有静电电荷响应的非FE信号的实例。通过这种方式,FE信号可与仅具有静电电荷响应的非FE信号区分开。
参看图7,示出根据本公开的一些实施例的PFM的操作方法。在步骤S710中,将FE膜安置在衬底上以供使用PFM设备(例如,图1中的PFM设备1000)扫描FE膜的表面。在步骤S720中,分析FE膜以确定由PFM设备输出的响应是真FE信号还是仅具有静电电荷响应的非FE信号。
在一些实施例中,步骤S720包含子步骤S721到子步骤S723的迭代。在子步骤S721中,所述方法在FE膜的每一像素处执行数据收集。参看图1和图7,产生包含多个读取电压步骤的输入波形信号1141并将所述输入波形信号1141提供到FE膜1020。遍及FE膜1020的像素移动AFM探针1040,且通过检测器1070检测AFM探针1040的偏转以输出偏转信号1071。可通过锁定放大器1080捕获偏转信号1071的相位和振幅,且FE膜1020的像素的频谱数据可包含偏转信号1071相对于读取电压步骤的相位。通过这种方式,收集FE膜1020的每个像素处的频谱数据。
在子步骤S722中,(例如,通过处理器)分析在FE膜的每个像素处收集的数据以获得分析结果。在一些实施例中,处理器可确定每一像素中的频谱数据是否具有FE材料的特征。举例来说,暴露于偏置电压的FE材料的响应可具有磁滞回线。处理器可确定像素相对于读取电压步骤的响应(例如,频谱数据)是否具有磁滞回线以确定像素的响应是真FE信号。
在子步骤S723中,可根据分析结果来调谐FE膜的沉积,以便相对于减小噪声获得用于扫描的FE膜的优化沉积。举例来说,在FE膜中的像素的响应指示来自FE膜的响应是非FE信号的情况下。指示AFM探针的探针尖端不会遵循FE膜的真正构形。因此,可通过针对FE膜增加或减少掺杂物量来调谐FE膜的沉积,以便控制FE膜的FE特性。
本发明的一些实施例应用机器学习和数据挖掘算法来分析PFM设备中的数据。机器学习是人工智能的分支,其涉及可从数据中学习的系统的构造和研究。应用于本发明的实施例的机器学习和数据挖掘算法区分非FE信号与真FE信号。
举例来说,每一像素的频谱数据中的FE特性(例如,磁滞回线的特性)针对分类结果(例如,真FE信号或非FE信号)具有较强关联性。如前面提及的,FE特性可由磁滞回线表征,所述磁滞回线由根据图2D中的读取电压步骤具有不同写入电压Vwrite的偏转信号的扫掠曲线Ct和回扫曲线Crt形成。磁滞回线可由扫掠曲线Ct和回扫曲线Crt的相位幅值和扫掠曲线和回扫曲线的矫顽磁性电压表征。换句话说,频谱数据中的FE特性可以由不同写入电压步骤和读取电压步骤中的扫掠相位曲线Ct和回扫曲线Crt的相位幅值以及扫掠曲线和回扫曲线的矫顽电压表示。
在一些实施例中,可输入分类结果和频谱数据(或频谱数据的FE特性)作为用于机器学习和数据挖掘算法的训练数据。在实例中,频谱数据和其分类结果的图案可用作用于机器学习算法的训练数据。输入图6中的图案601和图案603和图9A到图9C中呈现的频谱数据作为用于机器学习和数据挖掘算法的训练数据。
在替代实例中,分类结果和由相位幅值表征的FE特性可用作机器学习算法的训练数据。机器学习和数据挖掘算法配置成寻找分类结果与频谱数据之间的规则或关系。一旦进行机器学习算法的训练,则利用所找出的规则或关系来预测输入频谱数据的分类结果。在一些实施例中,图7中的步骤S722可包含基于机器学习和数据挖掘算法,基于在训练机器学习和数据挖掘算法中获得的频谱数据与分类结果之间的所找出的规则或关系来分析每个像素的频谱数据。
图9A到图9C示出根据一些实施例的确定为铁电信号和非铁电信号的频谱数据。图9A到图9C中的在Y轴上具有探针位移且在X轴上具有读取电压Vr的频谱数据包括对应于输入波形信号(亦即,波形A或波形B)的第一读取电压步骤a、第二读取电压步骤b以及第三读取电压步骤c的第一探针位移、第二探针位移以及第三探针位移。获取第二电压步骤b中的第二探针位移,例如读取电压Vr的值是第二电压步骤b,输入波形信号可以是两种类型:波形A或波形B。在波形A中,写入电压Vwrite可与图2A中的序列201a到序列205a和图2B中的序列201b到序列209b相同,且可在一个序列中将其值从作为起点的0V改变到+V,从+V改变回-V到0V,且从-V改变到0V。在波形B中,写入电压Vwrite可与图2C中的序列201c到序列205c相同,且可在一个序列中将其值从作为起点的-V改变到+V到0V且从+V改变回-V到0V。在波形A或波形B的Y轴上存在第二电压步骤b中的第二探针位移。波形A或波形B是写入电压Vwrite与探针位移之间的关系。
此处是对图9A到图9C中的频谱数据901a、频谱数据901b以及频谱数据901c的解释。图9A到图9C中的频谱数据901a、频谱数据901b或频谱数据901c可呈现为类似于水管,第二电压步骤b的线可被称为十字线,且横截面呈现为波形A或波形B。在图9A的频谱数据901a中,因为第一读取电压步骤a、第二读取电压步骤b以及读取电压步骤c的探针位移的不同值(即,探针位移的最高值与探针位移的最低值之间的差值)在探针位移中具有相同宽度,所以这意味着读取电压步骤a、读取电压步骤b以及读取电压步骤c中的信号是这三个位置中的平移运动。因此,图9A的频谱数据901a内部并不具有铁电信号。在图9B的频谱数据901b中,因为第二读取电压步骤b的探针位移的不同值略微大于第一读取电压步骤a的探针位移的不同值和第三读取电压步骤c的探针位移的不同值,所以这意味着读取电压步骤b中的信号内部具有弱铁电信号。在图9C的频谱数据901c中,因为第二读取电压步骤b的探针位移的不同值大于第一读取电压步骤a的探针位移的不同值和第三读取电压步骤c的探针位移的不同值,所以这意味着读取电压步骤b中的信号内部具有强铁电信号。
由处理器操作的图7中的步骤S722的机器学习和数据挖掘算法可确定第二读取电压步骤b的第二探针位移与第一读取电压步骤a的第一探针位移之间的差值和第二读取电压步骤b的第二探针位移与第三读取电压步骤c的第三探针位移之间的差值以分析频谱数据来确定像素的频谱数据是否具有铁电信号。详细地说,当第二读取电压步骤b的第二探针位移与第一读取电压步骤a的第一探针位移之间的差值和第二读取电压步骤b的第二探针位移与第三读取电压步骤c的第三探针位移之间的差值小于阈值时,处理器、机器学习算法或数据挖掘算法确定像素的频谱数据是非铁电信号。当第二读取电压步骤b的第二探针位移与第一读取电压步骤a的第一探针位移之间的差值和第二读取电压步骤b的第二探针位移与第三读取电压步骤c的第三探针位移之间的差值不小于阈值时,处理器、机器学习算法或数据挖掘算法确定像素的频谱数据是铁电信号。
参看图8,示出根据一些实施例的检测来自FE膜的FE信号的方法。在步骤S810中,产生输入波形信号,其中输入波形信号包含具有不同电压电平的多个读取电压步骤。在步骤S820中,将输入波形信号施加到FE膜。在一些实施例中,将输入波形信号施加到FE膜在FE膜与探针尖端之间形成偏置电压。在步骤S830中,通过压电式力显微镜设备的原子力显微镜探针来扫描FE膜的表面以测量FE膜的表面构形。在步骤S840中,在将输入波形信号施加到FE膜的像素时检测原子力显微镜探针的偏转,以产生偏转信号。在步骤S850中,基于偏转信号来产生像素的频谱数据。在一些实施例中,像素的频谱数据包含偏转信号的相位。在步骤S860中,分析每一像素的频谱数据以确定像素的频谱数据是铁电信号还是非铁电信号。
根据一些实施例,一种压电式力显微镜(PFM)设备包含波形产生器、原子力显微镜探针、检测器以及处理器。波形产生器配置成产生输入波形信号,其中输入波形信号包含具有不同电压电平的多个读取电压步骤。原子力显微镜探针配置成对铁电膜的表面进行扫描以测量铁电膜的表面构形。检测器配置成在将输入波形信号施加到铁电膜的像素时检测原子力显微镜探针的偏转,以产生偏转信号。偏转信号用于产生像素的频谱数据。处理器配置成分析像素的频谱数据以确定像素的频谱数据是铁电信号还是非铁电信号。
在相关实施例中,所述的压电式力显微镜设备更包括:锁定放大器,耦接到所述检测器,所述锁定放大器配置成基于所述偏转信号来捕获所述原子力显微镜探针的探针位移,其中所述像素的所述频谱数据包括所述原子力显微镜探针的所述探针位移。
在相关实施例中,所述频谱数据包括对应于所述输入波形信号的第一读取电压步骤、第二读取电压步骤以及第三读取电压步骤的第一探针位移、第二探针位移以及第三探针位移,其中所述第二读取电压步骤小于所述第一读取电压步骤且大于所述第三读取电压步骤,当所述第二探针位移与所述第一探针位移之间的差值和所述第二探针位移与所述第三探针位移之间的差值小于阈值时,所述处理器确定所述像素的所述频谱数据是所述非铁电信号,以及当所述第二探针位移与所述第一探针位移之间的所述差值和所述第二探针位移与所述第三探针位移之间的所述差值不小于所述阈值时,所述处理器确定所述像素的所述频谱数据是所述铁电信号。
在相关实施例中,所述输入波形和对所述频谱数据的确定用作机器学习算法的训练数据以确定使所述输入波形和对所述频谱数据是所述铁电信号还是所述非铁电信号的确定关联的规则。
在相关实施例中,所述输入波形信号在每一测量周期中包含多个序列,所述多个读取电压步骤中的每一个对应于所述多个序列中的一个,所述多个序列的数目等于所述多个读取电压步骤的数目,所述多个序列中的每一个包含多个写入脉冲,以及所述多个写入脉冲中的每一个后接所述多个读取电压步骤中的至少一个。
在相关实施例中,所述多个序列中的每一个包含多个时间间隔,所述多个时间间隔中的每一个包含将所述多个写入脉冲当中的写入脉冲施加到所述铁电膜的写入周期和将所述多个读取电压步骤中的所述至少一个应用于多个铁电膜的读取周期,以及所述写入周期与所述读取周期不交叠。
在相关实施例中,在测试模式下,所述处理器配置成记录与所述多个读取电压步骤中的所述至少一个的应用相关联的信号定时,并确定所述多个读取电压步骤中的所述至少一个当中的选定读取电压步骤的选定信号定时,所述多个读取电压步骤中的所述至少一个产生具有最小噪声电平的所述铁电信号,以及在操作模式下,所述处理器配置成在所述读取周期期间应用与所述选定信号定时相关联的所述选定读取电压步骤。
在相关实施例中,所述多个序列中的每一个包含多个时间间隔,所述多个时间间隔中的每一个包含将所述多个写入脉冲当中的写入脉冲施加到所述铁电膜且将所述多个读取电压步骤中的所述至少一个应用于所述铁电膜的写入周期。
根据一些实施例,一种适用于压电式力显微镜设备的检测来自铁电膜的铁电信号的方法。所述方法包含以下步骤:产生输入波形信号,其中输入波形信号包含具有不同电压电平的多个读取电压步骤;将输入波形信号施加到铁电膜;通过压电式力显微镜设备的原子力显微镜探针来对铁电膜的表面进行扫描以测量铁电膜的表面构形;在将输入波形信号施加到铁电膜的像素时检测原子力显微镜探针的偏转,以产生偏转信号;基于偏转信号来产生像素的频谱数据;以及分析像素的频谱数据以确定像素的频谱数据是铁电信号还是非铁电信号。
在相关实施例中,所述的方法更包括:基于所述偏转信号来捕获所述原子力显微镜探针的探针位移,其中所述像素的所述频谱数据包括所述原子力显微镜探针的所述探针位移。
在相关实施例中,所述频谱数据包括对应于所述输入波形信号的第一读取电压步骤、第二读取电压步骤以及第三读取电压步骤的第一探针位移、第二探针位移以及第三探针位移,其中所述第二读取电压步骤大于所述第一读取电压步骤且大于所述第三读取电压步骤,以及分析所述像素的所述频谱数据以确定所述像素的所述频谱数据是所述铁电信号还是所述非铁电信号包括:确定所述第二探针位移与所述第一探针位移之间的差值和所述第二探针位移与所述第三探针位移之间的差值是否小于阈值,响应于确定所述第二探针位移与所述第一探针位移之间的所述差值和所述第二探针位移与所述第三探针位移之间的所述差值小于所述阈值而确定所述像素的所述频谱数据是所述非铁电信号,以及响应于确定所述第二探针位移与所述第一探针位移之间的所述差值和所述第二探针位移与所述第三探针位移之间的所述差值不小于所述阈值而确定所述像素的所述频谱数据是所述铁电信号。
在相关实施例中,所述输入波形和对所述频谱数据的确定用作机器学习算法的训练数据以确定使所述输入波形和对所述频谱数据是所述铁电信号还是所述非铁电信号的确定关联的规则。
在相关实施例中,所述输入波形信号在每一测量周期中包含多个序列,所述多个读取电压步骤中的每一个对应于所述多个序列中的一个,所述多个序列的数目等于所述多个读取电压步骤的数目,所述多个序列中的每一个包含多个写入脉冲,以及所述多个写入脉冲中的每一个后接所述多个读取电压步骤中的至少一个。
在相关实施例中,所述多个序列中的每一个包含多个时间间隔,所述多个时间间隔中的每一个包含将所述多个写入脉冲当中的写入脉冲施加到所述铁电膜的写入周期和将所述多个读取电压步骤中的所述至少一个应用于所述铁电膜的读取周期,以及所述写入周期与所述读取周期不交叠。
在相关实施例中,所述的方法更包括:记录与所述多个读取电压步骤中的所述至少一个的应用相关联的信号定时并确定所述多个读取电压步骤中的所述至少一个当中的选定读取电压步骤的选定信号定时,所述多个读取电压步骤中的所述至少一个产生在测试模式下具有最小噪声电平的所述铁电信号;以及在操作模式下,在所述读取周期期间应用与所述选定信号定时相关联的所述选定读取电压步骤。
在相关实施例中,所述多个序列中的每一个包含多个时间间隔,所述多个时间间隔中的每一个包含将所述多个写入脉冲当中的写入脉冲施加到所述铁电膜且将所述多个读取电压步骤中的所述至少一个应用于所述铁电膜的写入周期。
根据一些实施例,一种适用于压电式力显微镜设备的检测铁电信号的方法,包括:产生输入波形信号,其中所述输入波形信号包含具有不同电压电平的多个读取电压步骤;将所述输入波形信号施加到铁电膜;响应于将所述输入波形信号施加到所述铁电膜的像素来检测原子力显微镜探针的偏转,以产生偏转信号;基于所述偏转信号和所述输入波形信号来产生所述像素的频谱数据;以及通过机器学习算法来分析所述像素的所述频谱数据以确定所述像素的所述频谱数据是铁电信号还是非铁电信号。
在相关实施例中,所述频谱数据包括对应于所述输入波形信号的第一读取电压步骤、第二读取电压步骤以及第三读取电压步骤的第一探针位移、第二探针位移以及第三探针位移,其中所述第二读取电压步骤小于所述第一读取电压步骤且大于所述第三读取电压步骤,执行所述机器学习算法以:确定所述第二探针位移与所述第一探针位移之间的差值和所述第二探针位移与所述第三探针位移之间的差值;当所述第二探针位移与所述第一探针位移之间的所述差值和所述第二探针位移与所述第三探针位移之间的所述差值小于阈值时,所述处理器确定所述像素的所述频谱数据是所述非铁电信号,以及当所述第二探针位移与所述第一探针位移之间的所述差值和所述第二探针位移与所述第三探针位移之间的所述差值不小于所述阈值时,所述处理器确定所述像素的所述频谱数据是所述铁电信号。
在相关实施例中,所述的方法更包括:通过所述压电式力显微镜设备的所述原子力显微镜探针来对所述铁电膜的表面进行扫描以测量所述铁电膜的表面构形。
在相关实施例中,所述输入波形信号在每一测量周期中包含多个序列,所述多个读取电压步骤中的每一个对应于所述多个序列中的一个,所述多个序列的数目等于所述多个读取电压步骤的数目,所述多个序列中的每一个包含多个写入脉冲,以及所述多个写入脉冲中的每一个后接所述多个读取电压步骤中的所述至少一个。
根据一些实施例,一种压电式力显微镜(PFM)设备包含波形产生器、原子力显微镜探针、检测器、锁定放大器以及处理器。波形产生器配置成产生输入波形信号,其中输入波形信号包含具有不同电压电平的多个读取电压步骤。原子力显微镜探针配置成对铁电膜的表面进行扫描以测量铁电膜的表面构形。检测器配置成在将输入波形信号施加到铁电膜的像素时检测原子力显微镜探针的偏转,以产生偏转信号。原子力显微镜探针的偏转信号用于产生像素的频谱数据。锁定放大器耦接到检测器且配置成捕获偏转信号的相位,其中像素数据的频谱数据包括偏转信号的相位。处理器配置成分析像素的频谱数据以确定像素的频谱数据是铁电信号还是非铁电信号。
前文概述若干实施例的特征以使本领域的技术人员可更好地理解本公开的各个方面。本领域的技术人员应了解,其可易于使用本公开作为设计或修改用于实现本文中所引入的实施例的相同目的和/或达成相同优势的其它工艺和结构的基础。本领域的技术人员还应认识到,此类等效构造并不脱离本公开的精神和范围,且本领域的技术人员可在不脱离本公开的精神和范围的情况下在本文中进行各种改变、替代以及更改。
- 检测铁电信号的方法和压电式力显微镜设备
- 振动型惯性力检测传感器的检测信号处理方法及振动型惯性力检测传感器