一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于无人驾驶汽车技术领域,尤其涉及一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统。
背景技术
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。
随着智能传感技术的推广,车辆的自动行驶逐渐被人们所接受;当车辆在不同的环境内进行行驶过程中,其往往在受行政法规限制外还因与周边环境内的移动物保持相似的移动速度,以避免车辆与周边物体产生冲突;然而,现有的车辆自动行驶系统无法实现上述功能,进而使得车辆在自动行驶过程中的安全性受到影响。
发明内容
本发明提供一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,旨在解决现有技术存在的问题。
本发明是这样实现的,一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,包括:
行驶系统,其用于控制车辆的行驶状态;
制动系统,其用于实现车辆的制动;
定点检测组件,其包括用于控制车辆的行驶状态的被埋设于既定行驶路下的定点、用于检测车辆通过了所述定点的定点检测部、行驶距离计测部,所述行驶距离计量部从被所述定点检测部检测的所述定点到当前地点的行驶距离;
传感器组件,其包括有分别设置在车辆前端、后端以及侧端的前红外传感器、侧红外传感器以及后红外传感器,所述前红外传感器、侧红外传感器以及后红外传感器分别与车辆的行驶系统以及制动系统连接;车辆进入自动行驶过程后,前红外传感器、侧红外传感器以及后红外传感器对于车辆行驶过程中周边的移动物体进行检测;前红外传感器、侧红外传感器以及后红外传感器在计算周期内计算车辆所处环境内的环境物体移动速度;所述计算周期至少为10S;
其中,当所述前红外传感器检测到车辆前方物体距离车辆的距离L小于5M时,对物体进行判断:车辆速度为V1,且物体与车辆的相对速度大于V1-X时;所述物体被判定为静止物体;否则判定为运动物体;V1=40~120km/h,X=0~15;
当所述物体被判定为静止物体时,且所述侧红外传感器检测车辆侧向预设距离内不存在物体时,所述行驶系统控制车辆变道以超越所述静止物体,否则所述制动系统启动以停止车辆的行驶;当所述物体被判定为运动物体时;行驶系统控制车辆跟随所述运动物体行驶。
优选的,还包括导航系统,其用于根据目的地与当前地点;模拟出车辆从当前地点行驶至目的地所需要经过的定点及连接所述定点而形成的行驶路线;
所述行驶系统控制车辆根据所述行驶路线行驶。
优选的,还包括:
设置于各路口指示灯信号发射器;所述指示灯信号发射器根据信号灯的状态将当前路口的各道路通行权限发送到车辆;
设置于各路口的道路右侧边线的感应线;车辆根据当前道路的右侧的感应线发出的信号判断当前车辆所在道路在路口时的行驶权限。
优选的,还包括设置于车辆后侧的提醒灯;
所述侧红外传感器以及后红外传感器对物体进行判断,当所述运动物体与车辆的相对速度小于大于Y时,判定所述物体为运动物体,Y=0~5;
所述运动物体与车辆的距离小于L时,所述车辆后侧的提醒灯启动闪烁,L1=10~15m。
优选的,所述行驶状态包括:向前行驶、倒车、加速行驶和减速行驶。
优选的,还包括限速标志识别装置,其用于识别车辆经过的限速标牌的内容以获得当前道路的限速值,所述行驶系统根据所述限速信息控制车辆的行驶速度不高于所述限速值。
优选的,设置于车辆左侧、右侧的提醒灯;
所述侧红外传感器对物体进行判断,当所述运动物体与车辆的相对速度小于大于Z时,判定所述物体为运动物体,Z=0~5;所述运动物体与车辆的距离小于L2时,所述运动物体所在车辆的侧面的提醒灯启动并闪烁,L2=5~10m。
与现有技术相比,本发明的有益效果是:本发明的一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,通过设置定点检测组件,包括用于控制车辆的行驶状态的被埋设于既定行驶路下的定点、用于检测车辆通过了定点的定点检测部、行驶距离计量部,行驶距离计量部从被定点检测部检测的定点到当前地点的行驶距离,还设置分别设置在车辆前端、后端以及侧端的前红外传感器、侧红外传感器以及后红外传感器,从而根据车辆各方向物体的运动状态,判断物体是否是运动物体,然后根据物体的状态对控制车辆的行驶状态,从而提升车辆行驶的安全性。
附图说明
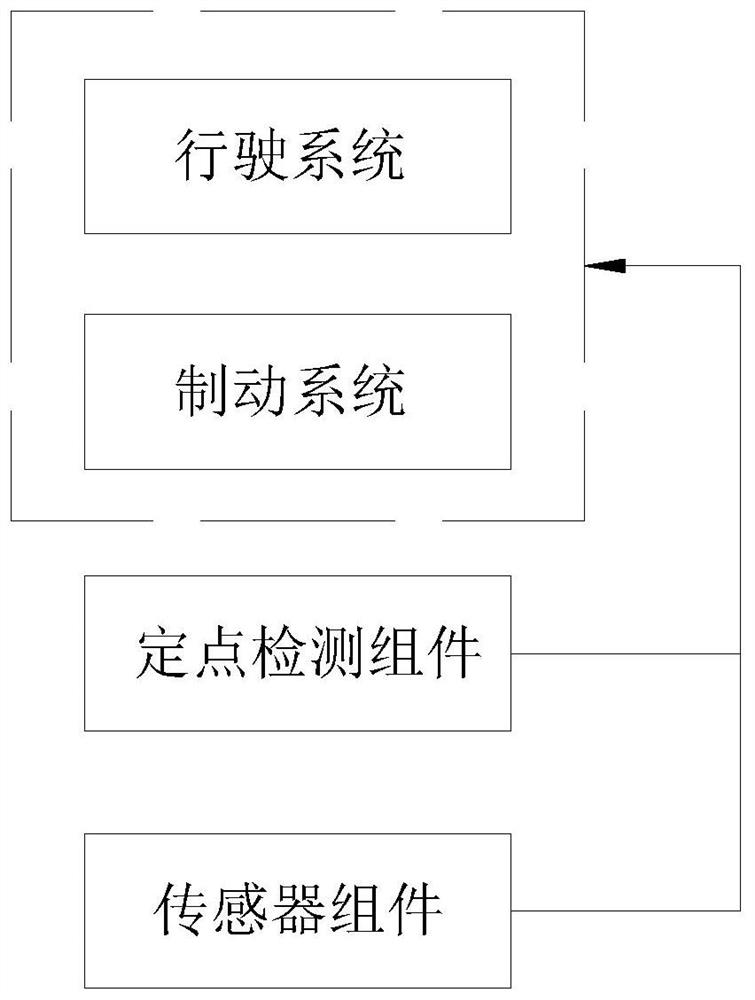
图1为本发明的系统原理示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例1
请参阅图1,本实施例提供一种技术方案:一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,包括行驶系统、制动系统定点检测组件、定点检测组件、传感器组件、导航系统、设置于各路口指示灯信号发射器、设置于各路口的道路右侧边线的感应线、限速标志识别装置。
行驶系统用于控制车辆的行驶状态。行驶状态包括:向前行驶、倒车、加速行驶和减速行驶。
制动系统用于实现车辆的制动。
定点检测组件,其包括用于控制车辆的行驶状态的被埋设于既定行驶路下的定点、用于检测车辆通过了定点的定点检测部、行驶距离计量部,行驶距离计量部从被定点检测部检测的定点到当前地点的行驶距离;
传感器组件,其包括有分别设置在车辆前端、后端以及侧端的前红外传感器、侧红外传感器以及后红外传感器,前红外传感器、侧红外传感器以及后红外传感器分别与车辆的行驶系统以及制动系统连接;车辆进入自动行驶过程后,前红外传感器、侧红外传感器以及后红外传感器对于车辆行驶过程中周边的移动物体进行检测;前红外传感器、侧红外传感器以及后红外传感器在计算周期内计算车辆所处环境内的环境物体移动速度;计算周期至少为10S。
其中,当前红外传感器检测到车辆前方物体距离车辆的距离L小于5M时,对物体进行判断:车辆速度为V1,且物体与车辆的相对速度大于V1-X时;物体被判定为静止物体;否则判定为运动物体。当物体被判定为静止物体时,且侧红外传感器检测车辆侧向预设距离内不存在物体时,行驶系统控制车辆变道以超越静止物体,否则制动系统启动以停止车辆的行驶;当物体被判定为运动物体时;行驶系统控制车辆跟随运动物体行驶。
在本实施例中,V1=60km/h,X=5,物体与车辆的相对速度大于55km/h时,物体被判定为静止物体;否则判定为运动物体。
导航系统用于根据目的地与当前地点;模拟出车辆从当前地点行驶至目的地所需要经过的定点及连接定点而形成的行驶路线;行驶系统控制车辆根据行驶路线行驶。
指示灯信号发射器根据信号灯的状态将当前路口的各道路通行权限发送到车辆;车辆根据当前道路的右侧的感应线发出的信号判断当前车辆所在道路在路口时的行驶权限。
为了方便对车辆周围的运动物体进行提醒,还安装设置于车辆后侧、左侧、右侧的提醒灯;后红外传感器对物体进行判断,当运动物体与车辆的相对速度大于Y时,判定物体为运动物体,Y=0~5;运动物体与车辆的距离小于L时,运动物体所在车辆的侧面的提醒灯启动并闪烁,L1=10~15m。侧红外传感器对物体进行判断,当运动物体与车辆的相对速度小于大于Z时,判定物体为运动物体,Z=0~5;运动物体与车辆的距离小于L时,运动物体所在车辆的侧面的提醒灯启动并闪烁,L2=5~10。
在本实施例中Y=2,Z=2,则当运动物体与车辆的相对速度大于2km/h时,判断判定物体为运动物体。L1=12m,L2=7m。
限速标志识别装置用于识别车辆经过的限速标牌的内容以获得当前道路的限速值,行驶系统根据限速信息控制车辆的行驶速度不高于限速值。
实施例2
本实施例提供一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,其与实施例1的区别在于,V1=80km/h,X=10,物体与车辆的相对速度大于70km/h时,物体被判定为静止物体;否则判定为运动物体。
另外,在本实施例中Y=3,Z=3。L1=13m,L2=8m。
实施例3
本实施例提供一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,其与实施例1的区别在于,V1=110km/h,X=15,物体与车辆的相对速度大于90km/h时,物体被判定为静止物体;否则判定为运动物体。
另外,在本实施例中Y=4,Z=4。L1=14m,L2=9m。
实施例4
本实施例提供一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统,其与实施例1的区别在于,V1=40km/h,X=0,物体与车辆的相对速度大于40km/h时,物体被判定为静止物体;否则判定为运动物体。
另外,在本实施例中Y=1,Z=1。L1=10m,L2=5m。
综上所述,本发明的一种无人驾驶汽车用实现高精度处理的车辆自动行驶系统通过设置定点检测组件,包括用于控制车辆的行驶状态的被埋设于既定行驶路下的定点、用于检测车辆通过了定点的定点检测部、行驶距离计量部,行驶距离计量部从被定点检测部检测的定点到当前地点的行驶距离,还设置分别设置在车辆前端、后端以及侧端的前红外传感器、侧红外传感器以及后红外传感器,从而根据车辆各方向物体的运动状态,判断物体是否是运动物体,然后根据物体的状态对控制车辆的行驶状态,从而提升车辆行驶的安全性。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。