一种基于三腔液压缸的节能动力踝足假肢及控制方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于机械和液压技术领域,具体为一种基于三腔液压缸的节能动力踝足假肢及控制方法。
背景技术
目前,全世界约有各类残疾人共计6.5亿。全世界有超过六百万的下肢截肢患者。受限于医疗水平,目前下肢截肢患者只能通过穿戴假肢尽可能的提高生活质量。目前市面上的大多数假肢都是不能够主动出力的被动假肢,在行走过程中,提供一定的弹性或者阻尼。使用被动踝足假肢的人行走缓慢,步幅较短,对于单侧截肢患者则表现出行走姿态不对称、健肢承受较大负荷,需要通过髋关节出力来补偿缺失的能量,会使穿戴被动假肢的人较健全人消耗更多能量。动力踝足假肢是一种先进的技术,能够通过动力源,为行走过程提供动力,同时具有被动式踝关节假肢的弹性或者阻尼,提供吸震缓冲功能,使穿戴假肢者的行走更接近健全人。但又受限于假肢的体积和重量,以及蓄电池的能量密度比,动力踝足假肢的续航能力不足,使用起来造成不便。
因此,本申请提出一种可以节省能量,提高动力踝足假肢续航能力的节能动力踝足假肢用以解决上述问题。
发明内容
本发明研发目的是为了解决现有的动力踝足假肢续航能力不足的问题。在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。
本发明的技术方案:
方案一:一种基于三腔液压缸的节能动力踝足假肢,包括电液直驱执行机构、小腿假肢和控制模块,控制模块与电液直驱执行机构电信号连接,电液直驱执行机构与小腿假肢建立连接,电液直驱执行机构包括伺服电机、双向齿轮泵、第一蓄能器、第二蓄能器、三腔液压缸和液压阀块,伺服电机与双向齿轮泵连接并安装在液压阀块上,液压阀块上安装有三腔液压缸,三腔液压缸的第二腔和第三腔分别与双向齿轮泵建立连接,液压阀块内设置有第一单向阀和第二单向阀,第一单向阀与第二单向阀之间连接有第一蓄能器,第二蓄能器与三腔液压缸的第一腔建立连接,三腔液压缸的执行端与小腿假肢建立连接。
进一步的,所述第一单向阀和第二单向阀的进油口连接,第一蓄能器连接在第一单向阀进油口和第二单向阀进油口之间。
进一步的,所述双向齿轮泵的一端油口分别与第一单向阀的出油口以及三腔液压缸的第二腔连接,双向齿轮泵的另一端油口分别与第二单向阀的出油口以及三腔液压缸的第三腔建立连接。
进一步的,所述小腿假肢包括足弓、足跟和连接架,连接架底部依次连接有足弓和足跟,连接架通过第一连接架连接轴与活塞杆连接端连接,活塞杆连接端通过活塞杆连接轴与三腔液压缸的活塞杆建立连接,连接架通过第二连接架连接轴与三腔液压缸的缸体铰接。
进一步的,所述三腔液压缸的缸体上端面设置有连接块。
进一步的,所述液压阀块上安装有第一压力传感器和第二压力传感器,第一压力传感器和第二压力传感器分别与控制模块通过电信号连接。
方案二:一种基于三腔液压缸的节能动力踝足假肢的控制方法,该方法是依托于方案一所述的一种基于三腔液压缸的节能动力踝足假肢所实现的,包括以下阶段:
控制跖屈:足跟先于足弓着地,双向齿轮泵、三腔液压缸的第二腔、第三腔组成闭合回路,油液依次流经双向齿轮泵的一端出油口,三腔液压缸的第三腔进油口,从第二腔出油口回至双向齿轮泵的另一端进油口,油液从第二蓄能器流出至第一腔,达到控制跖屈足弓着地的效果;
背屈阶段:膝盖带动小腿向前运动,三腔液压缸的活塞杆向上运动,活塞随之向上运动,油液依次流经双向齿轮泵的一端出油口、第二腔进油口,从第三腔的出油口回至双向齿轮泵的另一端进油口,第一腔内油液受到压力,流进第二蓄能器,将人体运动过程中的部分能量回收储存至第二蓄能器内;
动力跖屈:人工脚踝处于主动状态,油液依次流经双向齿轮泵的一端出油口、第三腔的进油口,从第二腔出油口回至双向齿轮泵的另一端进油口,其中补油环节,油液从第一蓄能器流出,经第一单向阀流向双向齿轮泵的另一端进油口,三腔液压缸的活塞杆向下运动,带动足弓压迫地面,推动假肢向上向前运动直至足弓完全离开地面,在此过程中第二蓄能器将在背屈阶段中储存的能量释放出来,与双向齿轮泵共同提供动力;
摆动阶段:油液依次流经双向齿轮泵的一端出油口、第二腔的进油口,从第三腔的出油口回至双向齿轮泵的另一端进油口,驱动三腔液压缸的活塞杆向上运动,将脚踝位置调整至初始状态,关闭第二蓄能器以节省能量。
本发明具有以下有益效果:
1、本发明的一种基于三腔液压缸的节能动力踝足假肢通过运动过程中的能量回收与释放,可以降低假肢对能量的消耗,与传统电液直驱动力踝足假肢相比可以获得更长的续航能力,三腔液压缸、第一蓄能器和第二蓄能器在动力跖屈中释放能量,可以降低峰值的功率;
2、本发明的一种基于三腔液压缸的节能动力踝足假肢在背屈阶段中吸收能量,可以降低伺服电机和双向齿轮泵在此阶段的能量输出,同时还具有吸震缓冲的效果。
附图说明
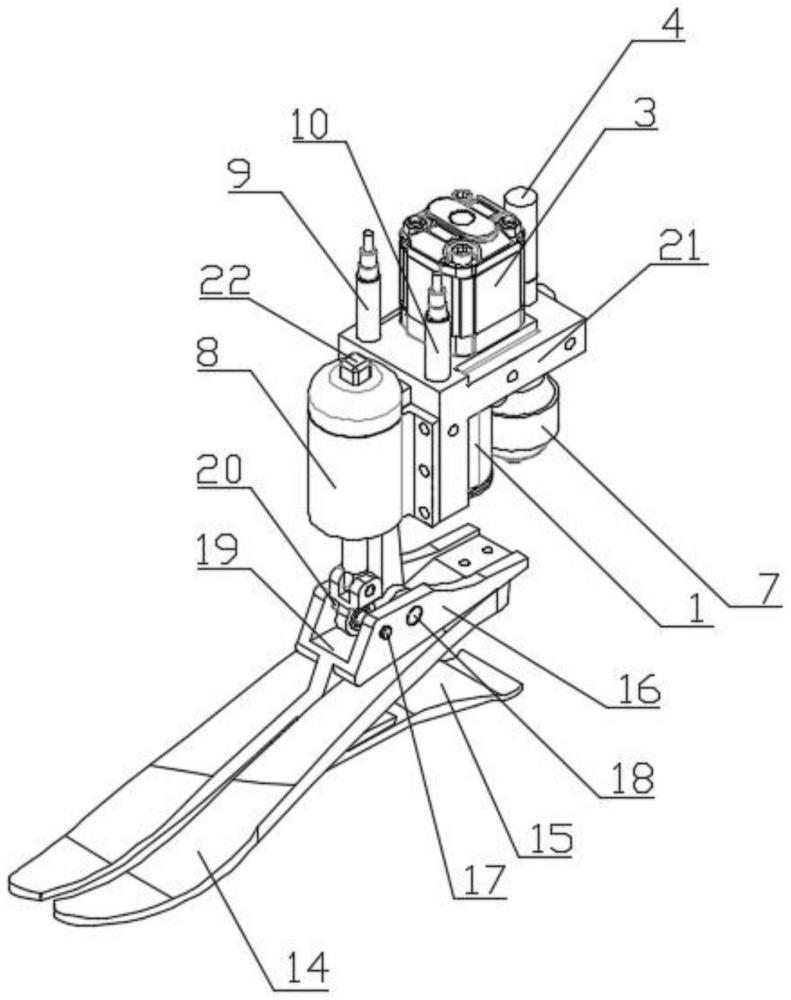
图1是一种基于三腔液压缸的节能动力踝足假肢的整体结构示意图;
图2是电液直驱执行机构的原理图;
图3是三腔液压缸的容腔示意图;
图4是电液直驱执行机构的主视图;
图5是一种基于三腔液压缸的节能动力踝足假肢的主视图;
图6是基于电液直驱技术的动力踝足假肢踝关节步态相位划分示意图;
图7是背屈阶段电液直驱执行机构状态示意图;
图8是动力跖屈电液直驱执行机构状态示意图;
图9是一种基于三腔液压缸的节能动力踝足假肢的仿真模型图;
图10是本发明与传统电液直驱动力踝足假肢的功率和能耗的仿真对比图。
图中:1-伺服电机,2-联轴器,3-双向齿轮泵,4-第一蓄能器,5-第一单向阀,6-第二单向阀,7-第二蓄能器,8-三腔液压缸,9-第一压力传感器,10-第二压力传感器,11-第一腔,12-第二腔,13-第三腔,14-足弓,15-足跟,16-连接架,17-第一连接架连接轴,18-第二连接架连接轴,19-活塞杆连接端,20-活塞杆连接轴,21-液压阀块,22-连接块。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
本发明所提到的连接分为固定连接和可拆卸连接,所述固定连接(即为不可拆卸连接)包括但不限于折边连接、铆钉连接、粘结连接和焊接连接等常规固定连接方式,所述可拆卸连接包括但不限于螺纹连接、卡扣连接、销钉连接和铰链连接等常规拆卸方式,未明确限定具体连接方式时,默认为总能在现有连接方式中找到至少一种连接方式能够实现该功能,本领域技术人员可根据需要自行选择。例如:固定连接选择焊接连接,可拆卸连接选择铰链连接。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
实施例1,结合图1-图10说明本实施例,本实施例的一种基于三腔液压缸的节能动力踝足假肢,包括电液直驱执行机构、小腿假肢和控制模块,控制模块与电液直驱执行机构电信号连接,电液直驱执行机构与小腿假肢建立连接,电液直驱执行机构包括伺服电机1、双向齿轮泵3、第一蓄能器4、第二蓄能器7、三腔液压缸8和液压阀块21,伺服电机1与双向齿轮泵3连接并安装在液压阀块21上,液压阀块21上安装有三腔液压缸8,三腔液压缸8的第二腔12和第三腔13分别与双向齿轮泵3建立连接,液压阀块21内设置有第一单向阀5和第二单向阀6,第一单向阀5与第二单向阀6之间连接有第一蓄能器4,第二蓄能器7与三腔液压缸8的第一腔11建立连接,三腔液压缸8的执行端与小腿假肢建立连接。
小腿假肢包括足弓14、足跟15和连接架16,连接架16分别通过第一连接架连接轴17和第二连接架连接轴18与三腔液压缸8建立连接,其中连接架16通过第一连接架连接轴17与活塞杆连接端19连接,活塞杆连接端19通过活塞杆连接轴20与三腔液压缸8的活塞杆端建立连接,连接架16通过第二连接架连接轴18与三腔液压缸8的缸体连接,三腔液压缸8的缸体作为假肢的一部分,在三腔液压缸8的上端面设置有连接块22,通过连接块22将三腔液压缸8与使用者的肢体连接在一起,足弓14和足跟15依次安装在连接架16的底部,在三腔液压缸8以及电液直驱执行机构的作用下为足弓14和足跟15提供动力。
电液直驱执行机构包括伺服电机1、双向齿轮泵3、第一蓄能器4、第二蓄能器7、三腔液压缸8和液压阀块21,伺服电机1、双向齿轮泵3、第一蓄能器4、第二蓄能器7和三腔液压缸8分别安装在液压阀块21上,液压阀块21为倒“L”型液压阀块,伺服电机1与双向齿轮泵3通过联轴器2连接,液压阀块21内安装有第一单向阀5和第二单向阀6,第一单向阀5的进油口与第二单向阀6的进油口连接,第一蓄能器4连接在第一单向阀5进油口与第二单向阀6进油口之间,双向齿轮泵3的一端油口分别与第一单向阀5的出油口以及三腔液压缸8的第二腔12连接,双向齿轮泵3的另一端油口分别与第二单向阀6出油口以及三腔液压缸8的第三腔13连接,第二蓄能器7与三腔液压缸8的第一腔11连接,在假肢运动的被动阶段回收能量,在假肢运动的主动阶段释放能量,三腔液压缸8的第二腔12与双向齿轮泵3一端连接,控制脚踝完成背屈运动,三腔液压缸8的第三腔13与双向齿轮泵3另一端连接,在假肢运动的主动阶段与第二蓄能器7共同为小腿假肢提供动力。
液压阀块21上还安装有第一压力传感器9和第二压力传感器10,第一压力传感器9和第二压力传感器10分别与控制模块通过电信号连接,第一压力传感器9与第二压力传感器10可实时监测油路的压力,在油路压力过大或过小时及时进行调整。
如图9所示,在仿真软件中建立一种基于三腔液压缸的节能动力踝足假肢的仿真模型,包括控制器、驱动器、伺服电机和踝关节,踝关节包括三腔液压缸、齿轮泵和蓄能器。
如图10所示,使用预采集角度和预采集外负载力,对一种基于三腔液压缸的节能动力踝足假肢开展仿真研究,并与传统电液直驱动力踝足假肢进行对比,仿真结果显示,在一个步态周期内,本发明的峰值功率降低了19.8%、能量消耗减少了19.6%。
实施例2,结合图1-图10说明本实施例,本实施例的一种基于三腔液压缸的节能动力踝足假肢的控制方法,包括以下阶段:
控制跖屈:足跟15先于足弓14着地,双向齿轮泵3、三腔液压缸8的第二腔12、第三腔13组成闭合回路,油液依次流经双向齿轮泵3的一端出油口,三腔液压缸8的第三腔13进油口,从第二腔12出油口回至双向齿轮泵3的另一端进油口,油液从第二蓄能器7流出至第一腔11,达到控制跖屈足弓14着地的效果;
背屈阶段:膝盖带动小腿向前运动,三腔液压缸8的活塞杆向上运动,活塞随之向上运动,油液依次流经双向齿轮泵3的一端出油口、第二腔12进油口,从第三腔13的出油口回至双向齿轮泵3的另一端进油口,第一腔11内油液受到压力,流进第二蓄能器7,将人体运动过程中的部分能量回收储存至第二蓄能器7内;
动力跖屈:人工脚踝处于主动状态,油液依次流经双向齿轮泵3的一端出油口、第三腔13的进油口,从第二腔12出油口回至双向齿轮泵3的另一端进油口,其中补油环节,油液从第一蓄能器4流出,经第一单向阀5流向双向齿轮泵3的另一端进油口,三腔液压缸8的活塞杆向下运动,带动足弓14压迫地面,推动假肢向上向前运动直至足弓14完全离开地面,在此过程中第二蓄能器7将在背屈阶段中储存的能量释放出来,与双向齿轮泵3共同提供动力;
摆动阶段:油液依次流经双向齿轮泵3的一端出油口、第二腔12的进油口,从第三腔13的出油口回至双向齿轮泵3的另一端进油口,驱动三腔液压缸8的活塞杆向上运动,将脚踝位置调整至初始状态,关闭第二蓄能器7以节省能量,摆动过程中脚踝所受外力接近于零。
本实施例只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。