一种动物园环境清洁设备
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及动物饲养设备技术领域,特别涉及一种动物园环境清洁设备。
背景技术
现在的动物园和野生动物园里的每天都会产生很多的垃圾,开放参观后游客也会扔很多的垃圾,不及时清理的话对于动物生存环境有很大的影响,传统的动物园清洁都是由人工清洁,有些大型动物园人工清洁比较危险,而且人工清洁的效率也较低,很浪费劳动力和时间,因此急需发明一种可以代替人工进行自动化动物园环境清洁的设备。
发明内容
针对上述问题,本发明提供了一种动物园环境清洁设备,通过驱动电机带动大齿轮和驱动轮转动,驱动轮转动带动设备移动,同时大齿轮带动清扫传动装置使清扫刷转动清扫垃圾;通过夹杆将地上的水瓶树枝等大型垃圾收集起来并放到垃圾箱内,自动化的收集了大型垃圾;通过前轮带动垃圾收集传动装置转动从而带动垃圾收集箱将清扫刷扫起的垃圾倾倒到垃圾箱内,实现了无动力驱动收集小型垃圾,更加的方便快捷;通过第一电缸带动伸缩连杆伸缩从而带动垃圾箱前后移动,实现了垃圾的简单分类,保护了动物生存环境。
本发明所使用的技术方案是:一种动物园环境清洁设备,包括:主体机构、大型垃圾收集机构、清扫吸尘机构;
主体机构包括:底板、第一电缸、伸缩连杆、垃圾箱、前轮、垃圾收集传动装置、收集箱转轴、垃圾收集箱;
清扫吸尘机构包括:后固定架、吸尘器、第二电缸、清扫刷、清扫传动装置、驱动装置;
底板上固定安装有第一电缸,第一电缸的伸缩杆端与伸缩连杆的前端活动杆连接,伸缩连杆的后端与垃圾箱的下端面连接,垃圾箱滑动安装在底板上,垃圾箱的内部分为大型垃圾存放部分和小型垃圾存放部分,垃圾箱的一侧设有开关板;所述的前轮转动安装在底板的侧面,前轮的内轴与垃圾收集传动装置前端连接,垃圾收集传动装置的后端与收集箱转轴的一端连接,收集箱转轴的侧面安装有垃圾收集箱;所述的大型垃圾收集机构安装在主体机构的前端位置;所述的后固定架固定安装在底板上,后固定架的后端位置固定安装有吸尘器;第二电缸倾斜放置,第二电缸的套筒固定安装在吸尘器的侧面,第二电缸的伸缩杆端与清扫刷的转轴连接,清扫刷位于垃圾收集箱的后方,清扫刷的端部与清扫传动装置的前端连接,清扫传动装置的后端与驱动装置连接,驱动装置固定安装在吸尘器的侧面;
通过清扫吸尘机构的驱动装置带动设备移动,同时带动清扫传动装置联动使清扫刷清扫垃圾到垃圾收集箱中,通过大型垃圾收集机构将大型垃圾收集然后放到垃圾箱内,同时设备移动使前轮转动带动垃圾收集传动装置转动从而带动收集箱转轴转动进而使垃圾收集箱转动将垃圾倾倒到垃圾箱中,通过第一电缸带动伸缩连杆伸缩从而带动垃圾箱前后移动进而收集大型垃圾收集机构产生的垃圾和垃圾收集箱倾倒的垃圾。
进一步地,主体机构的垃圾收集传动装置包括:传动轮A、传动皮带A、传动轮B;
所述的传动轮A与一侧的前轮转轴固定连接;传动皮带A包覆传动轮A与传动轮B,传动轮B固定安装在收集箱转轴的一端。
进一步地,所述的主体机构还包括:前侧板、前固定架、控制器、前挡板、摄像头、活动板、弹簧;
所述的前侧板固定安装在底板的侧面,前侧板撒花姑娘固定安装有前固定架,前固定架上固定安装有控制器,前固定架的前端与前挡板连接,前挡板前端面固定安装有摄像头;活动板与垃圾收集箱转动连接,弹簧的一端与活动板连接,弹簧的另一端与垃圾收集箱的后端杆连接。
进一步地,所述的大型垃圾收集机构包括:舵机、转动连杆、转动杆、转动板、滑动板、伸缩推杆、耙、夹杆;
所述的舵机固定安装在前挡板的侧面板上,舵机的转轴与转动连杆的上端固定连接,转动连杆的下端与转动板的端部连接;转动杆的上端与舵机的转轴连接,转动杆的下端与转动板的端部连接;滑动板滑动安装在转动板下,滑动板的内侧固定安装有伸缩推杆,伸缩推杆的活塞杆端与转动板的内侧固定连接;耙有若干个,耙的上端与滑动板的内侧固定连接;夹杆有若干个,夹杆与耙通过转轴连接,夹杆的上端固定安装在转动板的下端面。
进一步地,所述的清扫吸尘机构的清扫传动装置包括:传动轮C、传动皮带B、传动轮D、小齿轮;
所述的传动轮C与清扫刷的转轴端部固定连接;传动皮带B包覆传动轮C与传动轮D,传动轮D转动安装在吸尘器的侧面,传动轮D的外侧与小齿轮固定连接。
进一步地,所述的清扫吸尘机构的驱动装置包括:大齿轮、驱动轴、驱动轮、驱动电机;
所述的驱动电机固定安装在吸尘器的侧面,驱动电机的电机轴与驱动轴连接,驱动轴与大齿轮固定连接,大齿轮与小齿轮相互啮合,驱动轴的外端与驱动轮固定连接。
进一步地,所述控制器包括:操作面板和中央处理器;
所述中央处理器中可编写控制程序,所述操作面板可人工操纵设备,也可以让整个设备按照设定程序自动工作。
本发明的有益效果:
(1)通过驱动电机带动驱动轴转动从而带动大齿轮和驱动轮转动,驱动轮转动带动设备进行移动,同时大齿轮带动清扫传动装置使清扫刷转动清扫垃圾,由于大齿轮比小齿轮大好几倍,所以驱动轮转一圈清扫刷需要转动若干圈,节约了能源,方便快速清扫垃圾,完成在移动同时清扫垃圾;
(2)设备移动的同时,夹杆将地上的水瓶树枝等大型垃圾收集起来,然后通过伸缩推杆带动耙和夹杆配合夹紧垃圾,通过舵机带动转动连杆和转动杆同时转动从而使转动板倾斜向上移动到垃圾箱的上方位置将垃圾放下,自动化的收集了大型垃圾,保护了动物生存环境;
(3)设备移动带动前轮转动,从而垃圾收集传动装置带动收集箱转轴转动使垃圾收集箱进行转动将清扫刷扫起的垃圾倾倒到垃圾箱内,通过吸尘器吸走地面的灰尘和较轻垃圾,实现了无动力驱动收集小型垃圾,更加的方便快捷;
(4)通过第一电缸带动伸缩连杆伸缩从而带动垃圾箱前后移动,在大型垃圾收集机构放垃圾时,垃圾箱向前移动,当垃圾收集箱将垃圾装起转动时,垃圾箱向后移动方便倾倒垃圾,垃圾箱的内部分为大型垃圾存放部分和小型垃圾存放部分,实现了垃圾的简单分类,垃圾箱的一侧设有开关板,收集满后打开将垃圾排出到指定位置。
附图说明
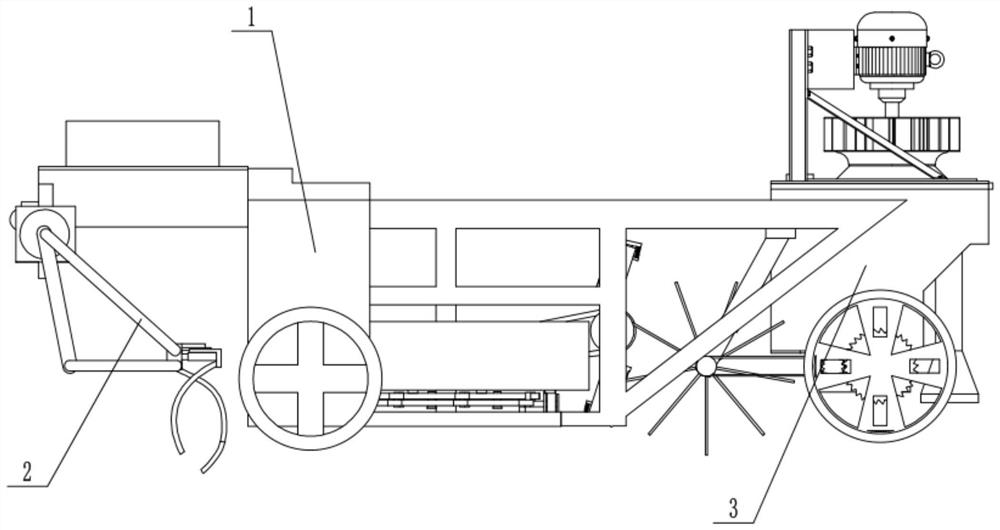
图1、图2、图3为本发明的整体结构示意图。
图4、图5、图6为本发明的主体机构的结构示意图。
图7为本发明的主体机构的A1处局部放大结构示意图。
图8、图9为本发明的大型垃圾收集机构结构示意图。
图10、图11为本发明的清扫吸尘机构结构示意图。
图12为本发明的清扫吸尘机构的A2处局部放大结构示意图。
附图标号:
1-主体机构;2-大型垃圾收集机构;3-清扫吸尘机构;101-底板;102-前侧板;103-前固定架;104-控制器;105-前挡板;106-摄像头;107-第一电缸;108-伸缩连杆;109-垃圾箱;110-前轮;111-传动轮A;112-传动皮带A;113-传动轮B;114-收集箱转轴;115-垃圾收集箱;116-活动板;117-弹簧;201-舵机;202-转动连杆;203-转动杆;204-转动板;205-滑动板;206-伸缩推杆;207-耙;208-夹杆;301-后固定架;302-吸尘器;303-第二电缸;304-清扫刷;305-传动轮C;306-传动皮带B;307-传动轮D;308-小齿轮;309-大齿轮;310-驱动轴;311-驱动轮;312-驱动电机。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、 “连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例,如图1-12所示,一种动物园环境清洁设备,包括:主体机构1、大型垃圾收集机构2、清扫吸尘机构3;
主体机构1包括:底板101、第一电缸107、伸缩连杆108、垃圾箱109、前轮110、垃圾收集传动装置、收集箱转轴114、垃圾收集箱115;
清扫吸尘机构3包括:后固定架301、吸尘器302、第二电缸303、清扫刷304、清扫传动装置、驱动装置;
底板101上固定安装有第一电缸107,第一电缸107的伸缩杆端与伸缩连杆108的前端活动杆连接,伸缩连杆108的后端与垃圾箱109的下端面连接,垃圾箱109滑动安装在底板101上,通过第一电缸107带动伸缩连杆108伸缩从而带动垃圾箱109前后移动,垃圾箱109的内部分为大型垃圾存放部分和小型垃圾存放部分,垃圾箱109的一侧设有开关板;所述的前轮110转动安装在底板101的侧面,前轮110的内轴与垃圾收集传动装置前端连接,垃圾收集传动装置的后端与收集箱转轴114的一端连接,收集箱转轴114的侧面安装有垃圾收集箱115,通过前轮110带动垃圾收集传动装置转动从而带动收集箱转轴114转动;大型垃圾收集机构2安装在主体机构1的前端位置,通过大型垃圾收集机构2收集水瓶、树枝等较大的杂物;后固定架301固定安装在底板101上,后固定架301的后端位置固定安装有吸尘器302,通过吸尘器302将尘土和轻微垃圾吸走;第二电缸303倾斜放置,第二电缸303的套筒固定安装在吸尘器302的侧面,第二电缸303的伸缩杆端与清扫刷304的转轴连接,清扫刷304位于垃圾收集箱115的后方,具体的,通过第二电缸303带动清扫刷304清扫刷304移动,在设备移动且不需要清扫地面时,通过第二电缸303带动清扫刷304向上移动抬起,清扫刷304的端部与清扫传动装置的前端连接,清扫传动装置的后端与驱动装置连接,驱动装置固定安装在吸尘器302的侧面,通过清扫吸尘机构3的驱动装置带动设备移动,同时带动清扫传动装置联动使清扫刷304清扫垃圾到垃圾收集箱115中。
本发明实施例的一个可选实施方式中,如图4-7所示,主体机构1的垃圾收集传动装置包括:传动轮A111、传动皮带A112、传动轮B113;
传动轮A111与一侧的前轮110转轴固定连接;传动皮带A112包覆传动轮A111与传动轮B113,传动轮B113固定安装在收集箱转轴114的一端,通过前轮110带动传动轮A111转动从而带动传动皮带A112转动进而带动传动轮B113转动使收集箱转轴114转动。
主体机构1还包括:前侧板102、前固定架103、控制器104、前挡板105、摄像头106、活动板116、弹簧117;
前侧板102固定安装在底板101的侧面,前侧板102上固定安装有前固定架103,前固定架103上固定安装有控制器104,具体地,控制器包括:操作面板和中央处理器;中央处理器中可编写控制程序,操作面板可人工操纵设备,也可以让整个设备按照设定程序自动工作;前固定架103的前端与前挡板105连接,前挡板105前端面固定安装有摄像头106,通过摄像头106实时收集图像信息传输给控制器104;活动板116与垃圾收集箱115转动连接,弹簧117的一端与活动板116连接,弹簧117的另一端与垃圾收集箱115的后端杆连接,通过弹簧117使垃圾收集箱115在铲起地面垃圾时进行缓冲。
本发明实施例的一个可选实施方式中,如图8、图9所示,大型垃圾收集机构2包括:舵机201、转动连杆202、转动杆203、转动板204、滑动板205、伸缩推杆206、耙207、夹杆208;
舵机201固定安装在前挡板105的侧面板上,舵机201的转轴与转动连杆202的上端固定连接,转动连杆202的下端与转动板204的端部连接,通过舵机201带动转动连杆202和转动杆203转动,将转动板204向上倾斜抬升;转动杆203的上端与舵机201的转轴连接,转动杆203的下端与转动板204的端部连接;滑动板205滑动安装在转动板204下,滑动板205的内侧固定安装有伸缩推杆206,伸缩推杆206的活塞杆端与转动板204的内侧固定连接;耙207有若干个,耙207的上端与滑动板205的内侧固定连接;夹杆208有若干个,夹杆208与耙207通过转轴连接,夹杆208的上端固定安装在转动板204的下端面,具体地,通过伸缩推杆206带动滑动板205移动从而带动耙207向内移动使耙207和夹杆208配合夹紧垃圾,当转动板204倾斜向上移动到垃圾箱109的上方位置,伸缩推杆206带动带动耙207和夹杆208松开将垃圾放下。
本发明实施例的一个可选实施方式中,如图10-12所示,清扫吸尘机构3的清扫传动装置包括:传动轮C305、传动皮带B306、传动轮D307、小齿轮308;
传动轮C305与清扫刷304的转轴端部固定连接;传动皮带B306包覆传动轮C305与传动轮D307,传动轮D307转动安装在吸尘器302的侧面,传动轮D307的外侧与小齿轮308固定连接,通过小齿轮308带动传动轮D307转动从而带动传动皮带B306转动进而带动传动轮C305转动使清扫刷304转动清扫垃圾到垃圾收集箱115中。
清扫吸尘机构3的驱动装置包括:大齿轮309、驱动轴310、驱动轮311、驱动电机312;
驱动电机312固定安装在吸尘器302的侧面,驱动电机312的电机轴与驱动轴310连接,驱动轴310与大齿轮309固定连接,大齿轮309与小齿轮308相互啮合,驱动轴310的外端与驱动轮311固定连接,通过驱动电机312带动驱动轴310转动从而带动大齿轮309转动进而带动小齿轮308转动,通过驱动轴310带动驱动轮311转动从而使设备移动。
工作原理:
首先通过摄像头106确定好线路,然后通过控制器104控制各部分协调工作,通过驱动电机312带动驱动轴310转动从而带动大齿轮309和驱动轮311转动,驱动轮311转动带动设备进行移动,同时大齿轮309带动小齿轮308转动带动传动轮D307转动从而带动传动皮带B306转动进而带动传动轮C305转动使清扫刷304转动清扫垃圾,由于大齿轮309比小齿轮308大好几倍,所以驱动轮311转一圈清扫刷304需要转动若干圈方便快速清扫,清扫刷304将垃圾清扫到垃圾收集箱115内;
设备移动的同时,夹杆208将地上的水瓶树枝等大型垃圾收集起来,然后通过伸缩推杆206带动滑动板205移动从而带动耙207向内移动使耙207和夹杆208配合夹紧垃圾,通过舵机201带动转动连杆202和转动杆203同时转动从而使转动板204倾斜向上移动到垃圾箱109的上方位置将垃圾放下;
同时,设备移动带动前轮110转动,从而传动轮A111转动带动传动皮带A112转动进而带动传动轮B113转动,传动轮B113带动收集箱转轴114转动使垃圾收集箱115进行转动,垃圾收集箱115下方的活动板116转动铲起地面和清扫刷304扫起的垃圾,将垃圾倾倒到垃圾箱109内,通过吸尘器302吸走地面的灰尘和较轻垃圾;
通过第一电缸107带动伸缩连杆108伸缩从而带动垃圾箱109前后移动,在大型垃圾收集机构2放垃圾时,垃圾箱109向前移动,当垃圾收集箱115将垃圾装起转动时,垃圾箱109向后移动到方便垃圾收集箱115将垃圾倾倒到其中,装满后,打开垃圾箱109一侧的活动板将垃圾排出。
在本发明的描述中,需要说明的是,术语“上”、“下”、 “前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。