定位装置、方法以及系统
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及定位导航领域,且尤其涉及用于改善全球导航卫星系统(GlobalNavigation Satellite System,GNSS)定位导航的精度及响应速度的装置、方法以及系统。
背景技术
导致基于GNSS的导航或定位的误差和延时可能存在多种原因。例如,由于地表的粗糙不平、电离层的不规则、云体间的差异等,从观察函数得出的伪距不可避免地存在误差。在城市峡谷环境,诸误差因多径效应而累积。城市因为变得愈发高楼密布,故而对改善定位的装置及方法的需要日增。
发明内容
基于此,有必要针对现有GNSS定位方案在城市峡谷场景中的反射、折射类多径干扰效应,以及无法避免的观测误差,使GNSS导航系统出现导航不准,导航迟钝等缺陷效应的问题,提供一种基于GNSS定位精度改善的装置、方法以及系统。
本发明提供改进GNSS定位精度及响应速度的装置、方法以及系统。
根据本发明的一方面,提供一种定位装置,包括存储单元,用于存储目标的第一时刻位置;以及与所述存储单元连接的处理单元,该处理单元被配置成:根据目标的第一时刻位置以及与第一时刻位置相关联第一时刻位置的特征向量,产生多个候选位置样本点,该多个候选位置样本点分布在样本空间中;根据候选位置样本点的特征向量与该第一时刻位置的特征向量之间的相似程度,对该多个候选位置样本点进行重新分布以获取经重新分布的候选位置样本点;以及从经重新分布的候选位置样本点获取目标在第一时刻之后的位置。
该存储单元还可以存储有基于目标特征的运动方程;该处理单元还被配置成:应用运动方程产生该多个候选位置样本点。该运动方程包括随机变量。该第一时刻位置的特征向量包括由GNSS观测方程所得的伪距;以及该第一时刻位置包括根据伪距确定的位置。该重新分布还包括:根据该候选位置样本点的特征向量与该第一时刻位置的特征向量之间的相似程度求解似然函数,以得每个候选位置样本点的似然程度;以及在似然程度较高的候选位置附近设置较多的经重新分布的候选位置样本点。该重新分布还包括:根据所述候选位置样本点的特征向量与第一时刻位置的特征向量之间的相似程度求解似然函数,以得每个候选位置样本点的似然程度;以及在似然程度越高的候选位置附近设置的经重新分布的候选位置样本点越密集。该第一时刻后的位置由经重新分布的候选位置样本点的加权平均位置得出。加权的权值由该似然函数变换以及归一化得到。
根据本发明的一方面,提供一种基于GNSS信号的系统,包括接收机,用于接收GNSS信号;以及与该接收机耦合的如上所述的定位装置。
根据本发明的一方面,提供一种定位方法,包括:获取目标的第一时刻位置;根据目标的第一时刻位置以及与第一时刻位置相关联第一时刻位置的特征向量,产生多个候选位置样本点,该多个候选位置样本点分布在样本空间中;根据候选位置样本点的特征向量与该第一时刻位置的特征向量之间的相似程度,对该多个候选位置样本点进行重新分布以获取经重新分布的候选位置样本点;以及从经重新分布的候选位置样本点获取目标在第一时刻之后的位置。
根据本发明的一方面,该方法还包括应用运动方程产生多个候选位置样本点,其中所述运动方程基于目标特征。
该运动方程包括随机变量。该第一时刻位置的特征向量包括由GNSS观测方程所得的伪距;以及该第一时刻位置包括根据伪距确定的位置。该重新分布还包括:根据该候选位置样本点的特征向量与该第一时刻位置的特征向量之间的相似程度求解似然函数,以得每个候选位置样本点的似然程度;以及在似然程度较高的候选位置附近设置较多的经重新分布的候选位置样本点。该重新分布还包括:根据该候选位置样本点的特征向量与该第一时刻位置的特征向量之间的相似程度求解似然函数,以得每个候选位置样本点的似然程度;以及在似然程度越高的候选位置附近设置的经重新分布的候选位置样本点越密集。该重新分布还包括:在似然程度较高的候选位置附近设置第一批候选位置样本点;以及在似然程度较低的候选位置附近设置第二批候选位置样本点,其中所述第一批候选位置样本点比第二批候选位置样本点多,以将所述第一批候选位置样本点与第二批候选位置样本点形成经重新分布的候选位置样本点。该重新分布还包括:从所述候选位置样本点向似然程度较高的候选位置挪移。
该第一时刻后的位置由经重新分布的候选位置样本点的加权平均位置得出。加权的权值由该似然函数变换以及归一化得到。
根据本发明的一方面,提供一种改良的GNSS定位的方法,该方法包括:获取目标的第一位置,该第一位置包括根据伪距在三维空间设定的位置;以第一位置为中心,产生第一代候选位置的多个候选位置点;以及迭代产生下一代的候选位置的多个候选位置点。
根据本发明的一方面,建立目标的运动方程和获取目标观测方程,依概率释放候选位置样本点。根据GNSS卫星导航结果,结合目标特征,应用适当的限制条件,在程序中建立目标的运动方程,依概率释放候选位置样本点。根据起始时刻的GNSS卫星导航结果,确定用户的第一代位置原点。基于概率理论,定义样本空间作为用户使用场景的映射。根据实际需要与用户的使用场景定义分布函数,按该函数概率密度随机产生第一代以位置原点为中心分布的等权值候选位置样本点集。获取第一代位置原点的特征向量,求解第一代候选位置集中每个样本点的特征向量。根据每个样本点和原点的特征向量的相似程度求解似然函数,对似然函数进行变换,归一化,得到每个样本点的权值,求解候选位置集中每个样本点的加权平均位置,得到第一代目标位置结果。
根据本发明的一方面,重新分布候选位置点包括:根据第一代样本点的权值,对第一代候选位置点进行重新分布。在似然程度高的位置附近放置更多的样本点,相应的在似然程度低的位置放置更少的样本点。得到第一代重新分布候选位置样本点集。
根据本发明的一方面,根据运动方程建立新时刻候选位置样本点方程包括:根据运动方程,初始时刻位置原点连同全体第一代重新分布候选位置样本点运动到新时刻位置,得到第二代位置原点和第二代候选位置样本点集。
根据本发明的一方面,迭代运算的结果输出包括:按照对第一代候选位置样本点使用过的操作,获取第二代位置原点和第二代候选位置样本点集的特征向量,计算似然函数,进行目标位置结果计算和重新分布。从而得到后代候选位置样本点以及后代目标位置结果。
与现有技术相比,本发明具有以下优良效果:
本发明提供了GNSS定位精度改善装置、方法和系统。其中,首先根据GNSS卫星导航结果,结合目标特征,应用适当的限制条件,建立目标的运动方程,获取目标的观测方程,依概率释放候选位置样本点,计算候选位置样本点的特征向量,似然函数,归一化权值。然后按权值对候选位置样本点进行重新分布。再根据运动方程生成新时刻候选位置样本点方程。最后再进行迭代运算,得出结果。本发明可以弥补在城市峡谷环境中现有导航、导航技术无法避免的多径效应导致定位误差高,导航迟钝等缺陷,减小无法避免的观测,运动方程误差,提高导航系统的精度。为现代城市峡谷内GNSS导航系统的改进提供有效的解决方案。
附图说明
在以下描述中,参考附图描述了作为本发明示例的具体实现。应当理解,可以使用其它实施例并且可以做出结构上的改变而不背离本发明的范围。在附图中,相同的附图标记遍及各幅视图指代相同或功能相似的元件。
图1为根据本发明一实施例的定位装置与定位系统的示意图;
图2为根据本发明一实施例的定位方法的示意流程图;
图3为根据本发明又一实施例的定位方法的示意流程图;
图4为根据本发明一实施例的定位方法的示意流程图;
图5为根据本发明一实施例的对候选位置点进行重新分布的示意流程图;
图6为根据本发明一实施例的数据曲线,其中分别示出了GNSS卫星输出原轨迹和根据本发明一实施例的定位轨迹;以及
图7为根据本发明一实施例的数据曲线,其中分别示出了GNSS卫星输出原轨迹与真实结果间的误差以及根据本发明一实施例所得的轨迹与真实结果间的误差。
具体实施方式
图1示出根据本发明一实施例的基于GNSS信号的系统100。如图1所示,系统100包括定位装置110以及与定位装置110连接的接收机140。示例而非限定性地,该定位装置110包括存储单元130以及处理单元120。应当理解,该系统也可以直接包括存储单元130、处理单元120以及接收机140。或者,该定位装置110可以包括处理单元120,并且该定位装置110连接外部的存储单元130和/或接收机140。
接收机140被配置成接收来自卫星的GNSS信号。接收机20可以被配置成接收伪距并由此确定接收机20的第一位置。
当被接收机140接收的至少一个GNSS信号是经建筑物或其他设施反射的信号时,接收机140所计算的伪距将会包括一定程度的误差。例如,汽车可以配置有包括接收机140的导航设备。汽车可以在高楼间的道路上行驶,使得接收机140所接收的至少一个GNSS信号在该GNSS信号被接收机140接收之前已经被建筑物反射。因此,基于经反射的GNSS信号所测量的伪距需要被校正以校正汽车的导航。应当理解,当接收机在人携带的移动设备中时,该问题将更具有挑战性。
有的定位方案提出校正伪距的测量。从以下的描述中可以看出本申请寻求解决该问题所用的途径不同于一般的方案。
出于示例的目的,参考在城市中运动的用户(人)描述一实施例。在该实施例中,用户携带配置有处理单元120的移动设备。
该处理单元120进一步耦合到存储单元130。存储单元可以存储描述物理环境的数据。物理环境的示例包括地图、建筑物的楼层布置图,等等。存储单元可以被配置成存储样本空间。该样本空间可以是物理环境的映射。该样本空间可以是该用户处于该物理环境中的多个可能位置。样本空间可以包括该用户在任意时间在该物理环境中的多个可能位置。样本空间可以包括在该物理环境中的所有可能位置,在该物理环境中任何用户可以被定位。例如,当物理环境包括在高楼层的房间时,样本空间可以包括处于该房间中的所有位置且该样本空间可以同时排除在该房间外部空间中的位置。
可以用向量来描述用户的各个位置。可以用包括用户面向的方向的向量来描述用户的各个位置。可以用坐标来描述用户的各个位置。可以用相对于样本空间中参考点的位移来描述用户的各个位置。
在该示例中,用户在第一时刻的第一位置是已知的。可以从耦合到处理单元120的接收机140所计算的一个或多个伪距得知第一位置,其中接收机被配置成基于GNSS信号来计算一个或多个伪距。第一位置可以由接收机提供给处理单元。用以计算第一位置的一个或多个伪距可以由接收机提供给处理单元。出于示例的目的,第一位置的特征可以以第一伪距的形式来描述。第一伪距可以被当作样本空间中第一位置的向量特征的一个示例。
处理单元120被配置成将已知的位置转换成多个候选位置样本点。所有的候选位置样本点均处在相对已知位置的各种位移处,并且所有的候选位置样本点被赋予相同的权值。对于与一个已知位置相关联的所有候选位置样本点而言,所有的候选位置样本点均被分配处于0和1之间的相同概率值。换言之,所有的候选位置样本点均被分配[0,1]的概率。为了便于参考,一个位置的候选位置样本点被统称为候选位置样本点集。
继续这个示例,使用用户的第一位置,处理单元被配置成提供一组第一候选位置样本点。多个第一候选位置样本点形成与第一位置相关联的同等可能位置的集合。处理单元被配置成使得第一候选位置样本点相对于第一位置分布。第一候选位置样本点可以在第一位置周围分散。处理单元可以被配置成在第一位置的附近随机分布多个第一候选位置样本点。处理单元可以被配置成应用分布函数来生成多个第一候选位置样本点。第一位置可以位于多个第一候选位置样本点的分布的中心。多个第一候选位置样本点可以被描述为相对于第一位置具有同等权值。传统的定位导航方案将用户视为一个确定的物理实体,该实体在空间中占据一个确定的位置。以概率论的观点来看,使用环境是一个样本空间,在传统方案下该用户以概率1占据某个位置。与传统方案不同,在本发明中,用户被视为一个候选位置样本点集,每个候选位置样本点以小于1的概率a占据一个空间位置,所有候选位置样本点的权值和为1。这种方法将用户的物理位置离散化,能显著降低在通过某些特殊位置时,在直射信号、反射信号与折射信号间的突变对导航程序输出位置结果突变的影响程度。
处理单元被配置成在分布第一候选位置样本点时考虑物理环境。例如,物理环境可以已经映射到样本空间,使得样本空间只包括位置或候选位置样本点可能位于的位置。因此,如果在物理环境中定义了禁止空间,则样本空间可以如此定义:该位置或候选位置样本点之一将不会被定义在或置于该禁止空间中。例如,样本空间可以被定义成不包括建筑物高楼层房间的外部空间。虽然在某些情况下,例如,当用户是无人机的情况下,用户可占据这样的位置,但是在本实施例中,用户是人,故而处理单元可以被配置成排除这样的位置(定位)。
处理单元被配置成获取某一时刻与位置的候选位置样本点对应的一代特征向量。在本例中,处理单元被配置成获取在第一时刻与第一候选位置样本点对应的第一代候选位置样本点特征向量。换言之,为多个第一候选位置样本点中的每一个获取对应的第一候选位置样本点特征向量。
对于每个第一候选位置样本点,处理单元被配置成将第一候选位置样本点特征向量与第一个位置向量作比较。如上所述,在本例中,第一位置向量在此情况下是第一位置的第一伪距。处理单元被配置成将第一伪距与每个候选位置样本点特征向量作比较。根据第一伪距与每个候选位置样本点特征向量的相似程度,可以得到一个似然函数。处理单元被配置成归一化该似然函数,以获得每个第一候选位置样本点各自的第一权值。
处理单元被配置成使用第一权值获得第一候选位置样本点的加权平均值。
处理单元可以被配置成提供加权平均值作为经改进的用户第一位置。处理单元可以被配置成交替地将第一权值应用到相应的第一候选位置样本点,并相应地重新分布第一候选位置样本点。重新分布可包括在具有相对较高的第一权值或更大可能性的第一候选位置样本点的附近定义更多的候选位置样本点,而在具有相对较低的第一权值或更小可能性的第一候选位置样本点的附近定义更少的候选位置样本点。这种重新分布导致一代经重新分布的候选位置样本点。新一代的经重新分布的候选位置样本点也是在该样本空间中找到的。
处理单元被配置成使用用户运动方程来生成下一代的位置。在本例中,用户是拥有移动设备的人。用户运动方程可以在移动设备中提供,诸如在耦合到处理单元的存储单元中。用户运动方程可以预编码在移动设备的固件中,并提供给处理单元。用户可以选择用户运动方程。用户运动方程可以是人工选择,也可以不需要人工干预自动选择。用户运动方程可以是从数个可能的用户运动方程中选择的一个运动方程。
继续本例,在本实施例中,处理单元应用的用户运动方程基于随机运动或布朗运动。处理单元被配置成将用户运动方程应用到第一位置以及每个重新分布的第一候选位置。所得的结果是第二位置和对应的多个第二候选位置。换言之,使用用户在第一时刻的第一位置和用户运动方程,得到用户在第一时刻之后一时刻的第二位置。简洁起见,第一时刻之后的时刻可以称为第二时刻。此外,针对用户在第一时刻的每个第一候选位置样本点和用户运动方程,得到相应的第二候选位置样本点。换言之,得到了第二代(或新一代,或后代)的候选位置样本点的位置。多个第二候选位置样本点可统称为第一时刻后一时间间隔的第二候选位置样本点集。
处理单元被配置成用第二个特征向量来描述第二位置。处理单元被配置成用相应的第二候选位置特征向量来描述每个第二候选位置样本点。
对于每个第二候选位置样本点,处理单元被配置成将第二候选位置特征向量与第二位置特征向量作比较。处理单元被配置成将第二特征向量与每个第二候选位置样本点特征向量作比较。根据第二特征向量与各个第二候选位置样本点特征向量的相似度,可以得到似然函数。处理单元被配置成均一化该似然函数,以获得每个第二候选位置样本点各自的第二权值。
处理单元被配置成使用第二权值获得第二候选位置的加权平均值。处理单元可以被配置成提供加权平均值作为改进的用户第二位置。通过这种方式,可以从已知位置确定用户的新位置,其中用户在一段时间间隔内从已知位置运动到新位置。
根据本发明一实施例,如图2所示,一种用于给目标定位的方法200包括,在步骤210,获得目标的第一时刻位置。目标的第一时刻位置可以存储在如图1所述的定位装置110的存储单元130中。或者,第一时刻位置也可以存储在定位装置110外部的存储器中。或者,目标的第一时刻位置可以从接收机140获取。
在步骤220,根据目标的第一时刻位置以及第一时刻位置的特征向量,产生多个候选位置样本点,其中多个候选位置样本点分布在样本空间中,第一时刻位置的特征向量与第一时刻位置相关联。示意而非限定性地,定位装置的处理单元可以被配置成将已知的位置转换成多个候选位置样本点。
在步骤230,根据候选位置样本点的特征向量与所述第一时刻位置的特征向量之间的相似程度,对多个候选位置样本点进行重新分布以获取经重新分布的候选位置样本点。示意而非限定性地,对于每个第一候选位置样本点,处理单元可以被配置成将第一候选位置样本点特征向量与第一个位置向量作比较。处理单元可以被配置成将第一伪距与每个候选位置样本点特征向量作比较。根据第一伪距与每个候选位置样本点特征向量的相似程度,可以得到一个似然函数。处理单元可以被配置成归一化该似然函数,以获得每个第一候选位置样本点各自的第一权值。处理单元可以被配置成使用第一权值获得第一候选位置样本点的加权平均值。
在步骤240,从重新分布的候选位置样本点获取目标在第一时刻之后的位置。示意而非限定性地,处理单元可以被配置成将用户运动方程应用到第一位置以及每个重新分布的第一候选位置。所得的结果是第二位置和对应的多个第二候选位置。处理单元可以被配置成用第二个特征向量来描述第二位置。处理单元被配置成用相应的第二候选位置特征向量来描述每个第二候选位置样本点。
对于每个第二候选位置样本点,处理单元可以被配置成将第二候选位置特征向量与第二位置特征向量作比较。处理单元可以被配置成将第二特征向量与每个第二候选位置样本点特征向量作比较。根据第二特征向量与各个第二候选位置样本点特征向量的相似度,可以得到似然函数。处理单元可以被配置成均一化该似然函数,以获得每个第二候选位置样本点各自的第二权值。
处理单元可以被配置成使用第二权值获得第二候选位置的加权平均值。处理单元可以被配置成提供加权平均值作为改进的用户第二位置。通过这种方式,可以从已知位置确定用户的新位置,其中用户在一段时间间隔内从已知位置运动到新位置。
根据本发明又一实施例,如图3所示,一种用于给目标定位的方法300包括,在步骤310,获取目标的第一位置。该第一位置可以包括根据伪距在三维空间设定的位置。在步骤320,以第一位置为中心,生成第一代候选位置的多个候选位置点。在步骤330,迭代生成下一代的候选位置的多个候选位置点。可以从下文的详细描述中进一步了解具体的迭代过程。
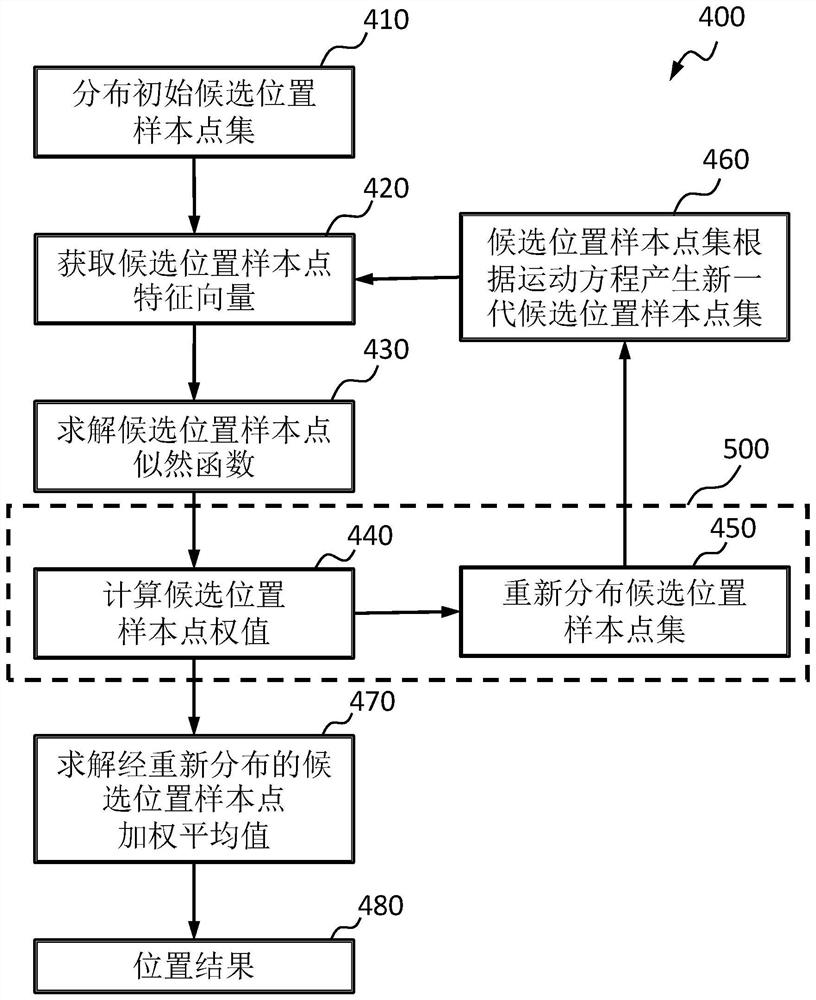
根据本发明一实施例,如图4所示,一种基于候选位置样本点的定位方法400包括,在步骤410,分布初始候选位置样本点集。具体地,根据实际需要与用户的使用场景定义分布函数,按该函数概率密度随机产生第一代以位置原点为中心分布的等权值候选位置样本点集,其中位置原点可以指初始位置或用户在第一时刻的第一位置的坐标。分布函数可选择高斯分布,指数分布,均匀分布等。本实例采取的是高斯分布。
在步骤420,获取候选位置样本点特征向量。具体地,获取第一代位置原点的特征向量,求解第一代候选位置集中每个样本点的特征向量。特征向量可选择伪距,原点距离差等。在一个实施例中,选择的特征向量是伪距。位置原点的伪距可以直接由GNSS导航卫星的输出的星历解出。候选位置集中每个样本点的伪距需要程序代入每个样本点的地理参数,结合GNSS卫星的星历,将其代入伪距方程得出。
在步骤430,求解候选位置样本点似然函数。具体地,根据每个样本点和原点的特征向量的相似程度求解似然函数。似然函数量化样本点和原点的差异,可选择特征向量原值差,特征向量原值比,特征向量均方根值差,特征向量均方根值比等。在一个实施例中,采取的似然函数是特征向量原值差。在该实施例中,似然函数值的大小与候选位置样本点权值大小成反相关,将似然函数值代入衰减指数函数对其进行变换。
在步骤440,计算候选位置样本点权值。具体地,将所有衰减指数函数的值求和,再归一化,得到每个样本点的权值。
在步骤450,重新分布候选位置样本点集。并且,在步骤460,候选位置样本点集可以根据运动方程产生新一代候选位置样本点集。随后,对新一代候选位置样本点集重复步骤420至440。
当通过步骤410至步骤460遍历了样本点集中所有或指定样本点时,方法400从步骤440行进至步骤470。在步骤470,求解经重新分布的候选位置样本点加权平均值。具体地,将各个样本点的坐标乘以权值再求和,求解候选位置集中每个样本点的加权平均位置,得到目标的位置结果480。
应当理解,该实施例所使用的方法400可以包括根据GNSS卫星导航结果,结合目标特征,应用适当的限制条件建立目标的运动方程和获取目标观测方程,依概率释放候选位置样本点、重新分布候选位置点、根据运动方程建立新时刻候选位置样本点方程以及迭代运算的结果输出,从而获得改善的GNSS定位精度和响应速度。
此外,根据用户的特征,特征可分为速度特征、转向特征以及避让特征等,在程序中建立与用户使用场景尽可能匹配的运动方程。运动方程可以有匀速运动方程,匀加速运动方程,布朗运动方程及静止方程。在一个实施例中,采用的是匀速运动与布朗运动的叠加方程。根据起始时刻的GNSS卫星测量位置结果,确定用户的第一代位置原点。当用户开始使用GNSS卫星导航时,根据地基辅助系统的能力不同,接收器会通过冷启动,温启动,热启动三种方式与GNSS卫星建立同步。同步后接收器输出用户初始位置。
基于概率理论,定义样本空间作为使用场景的映射。调用城市3D建筑物模型文件,几何量化城市3D地图,获取3D地图特征。特征包括建筑物外形轮廓边界,人行道边界,车道边界、树木分布、隧洞分布、建筑材料及电磁学参数等。
图5根据本发明一实施例的对候选位置点进行重新分布的方法500示意流程图,其示意而非限定性地描述了一个具体的迭代过程。根据第一代样本点的权值,对第一代候选位置点进行重新分布。重新分布的方法包括固定阈值重新分布和随机变量阈值重新分布。若采取的是固定阈值分布,经过多代运算,候选位置样本点的权值可能会集中在几个很少的点上,而其他候选位置样本点权值趋近于0,失去实用价值。为了避免权值退化,在此引入权值重分配方法进行重新赋权。随机变量阈值分布则不会出现权值退化的情况。在一个实施例中,采取的是随机变量阈值重新分布。其重新分布方法是遍历第一代样本点集的每一个样本点,当程序在评估某个确定的样本点时,定义一个[0,1]间均匀分布的随机数,将其他位置样本点的权值进行累加,若位置样本点权值的前n项和不小于这个随机数,且前(n-1)项和小于这个随机数时,则将该位置样本点重新分布至这个第n项的位置。当遍历完每一个位置样本点时,第一代候选位置点的位置按权值得到了重排。由此,得到第一代重新分布候选位置样本点集。
接着,根据运动方程建立新时刻候选位置样本点方程。具体地,初始时刻位置原点连同全体第一代重新分布候选位置样本点代入预设的运动方程,所有的点运动到新时刻位置,得到第二代位置原点和第二代候选位置样本点集。
随后,进行迭代运算得出结果。具体地,按照对第一代候选位置样本点使用过的操作,获取第二代位置原点和第二代候选位置样本点集的特征向量,计算似然函数,进行目标位置结果计算和重新分布。得到后代候选位置样本点以及后代目标位置结果。
可选的,根据图5,遍历第一代样本点集的每一个样本点,在步骤510,确定要评估的候选位置样本点编号i,其中i为整数,i大于等于0。在步骤520,定义一个[0,1]间均匀分布的随机变量k(i)。随机变量k(i)不包括0值或1值。接着,在步骤530,将样本点的权值前n项和,即,S(j)=a(j)+s(j-1),其中j为整数,j大于等于1。在步骤540,根据判断条件所得的结果,行至步骤550或步骤560。例如,若判断s(j)是小于k(i),则行进到步骤550,否则行到步骤560。又例如,判断候选样本点的权值的前n项和S(j)是否不随机变量k(i),并且样本点的权值的前(n-1)项的和S(j-1)是否小于随机变量k(i)。若S(j)≥k(i)且S(j-1) 图6为根据本发明一实施例的数据曲线,其中分别示出了GNSS卫星输出原轨迹630和使用根据本发明改善的轨迹620。从图6可见,相对于卫星观测轨迹,根据本发明的定位方法、装置和系统得到的输出轨迹更加接近于目标运动实际轨迹610。由此可见,根据本发明的定位方法、装置和系统提高了导航系统的精度。 图7为根据本发明一实施例的数据曲线,其中分别示出了GNSS卫星输出原轨迹与真实结果间的误差710以及根据本发明实施例的结果轨迹与真实结果间的误差720。如图7所示,根据本发明实施例的定位方法、装置和系统的定位误差小于GNSS卫星输出原轨迹与真实结果间的误差。明显的,根据本发明实施例的定位方法、装置和系统改善了导航系统的准确性。从图7还可以意识到一般上观测时间越长,观测误差也就越大。根据本发明实施例,定位的误差较之观测轨迹相对稳定。 本发明弥补了在城市峡谷环境中现有导航、导航技术无法避免的多径效应导致定位误差高,导航迟钝等缺陷,减小了无法避免的观测,运动方程误差,提高了导航系统的精度。为现代城市峡谷内GNSS导航系统的改进提供了有效的解决方案。 为使描述简洁,未对上述实施例中的各个技术特征所有可能的替换和/或组合进行描述,然而,只要这些技术特征的替换和/或组合不存在矛盾,都应当认为被本说明书记载的范围所涵盖。 以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当理解,可以在本申请的精神和原理之内对各个实施例及其中的特征做出各种修改、替换、添加、删除等而不超出本申请要求保护的范围。