一种智能教育机器人用教学资料调取系统
文献发布时间:2023-06-19 09:35:27
技术领域
本发明属于智能教育机器人技术领域,具体是一种智能教育机器人用教学资料调取系统。
背景技术
随着科学技术的发展,各种电子类产品已经越来越普及地出现在平常老百姓家,同时随着互联网的出现以及宽带的越来越廉价,人们的生活习惯已经发生了很大的变化;为了能够促进少儿学习,市面上出现了各种各样的教育机器人。
公开号为CN109215412A的发明专利公开了一种智能教育机器人系统,该系统包括机器人,机器人内设有中央处理器和电源管理模块,电源管理模块为整个机器人供电,中央处理器包括存储模块、感应识别模块和信息输出模块,感应识别模块和信息输出模块与存储模块相连,存储模块存储相关的学习视频及语音消息,感应识别模块用于识别特定的外部信息并将信息传入中央处理器中,信息输出模块用于输出相应的音频或者影像;机器人的眼睛部分装有红外摄像头,耳朵部分装有语音输入装置,嘴巴部分装有语音输出装置,身体部分装有显示屏,红外摄像头和语音输入装置与感应识别模块相连,语音输出装置、显示屏与信息输出模块相连。
上述方案在一定程度上能够实现儿童的自主学习和互动学习;因为上述方案存在学习类型单一、教学资料分类不详细等问题,所以上述方案仍需进一步地改进。
发明内容
为了解决上述方案存在的问题,本发明提供了一种智能教育机器人用教学资料调取系统。
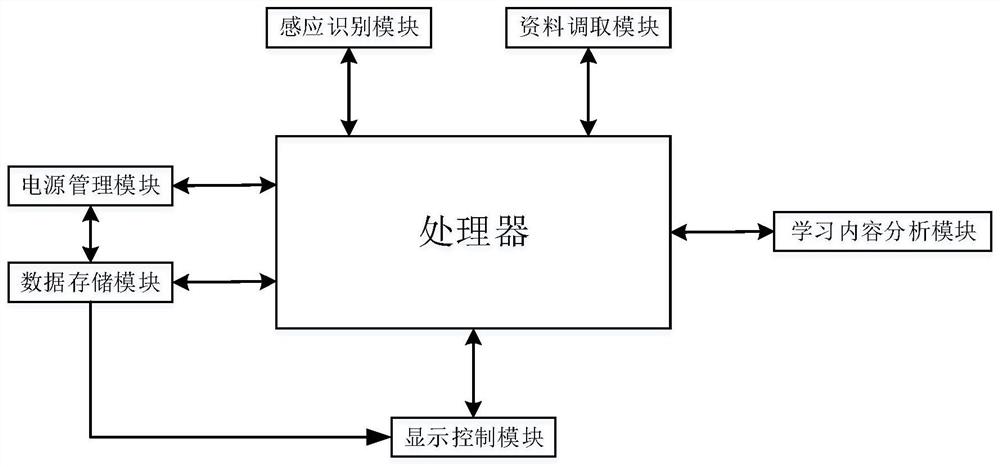
本发明的目的可以通过以下技术方案实现:一种智能教育机器人用教学资料调取系统,包括处理器、感应识别模块、资料调取模块、电源管理模块、数据存储模块、显示控制模块和学习内容分析模块;
所述感应识别模块用于采集和识别用户的交互信息,具体采集步骤为:
Z1:通过视频采集单元获取智能教育机器人前侧的视频信息,通过语音采集单元获取语音信息;并将视频信息和语音信息发送至处理器;
Z2:处理器接收到视频信息之后,对视频信息进行分析获取视频分析系数SF;
Z3:处理器接收到语音信息之后,对语音信息进行分析获取语音分析系数YF,具体获取步骤为:
Z31:通过数据存储模块获取预先存储的语音特征信息;
Z32:将语音信息和语音特征信息进行匹配识别,获取字错误率和句错误率,并将字错误率和句错误率分别标记为ZW和JW;其中语音信息的匹配识别为现有技术,论文《基于语义关联的终端模糊语音高精度识别方法》中基于语音关联的终端模糊语音高精度识别方法能够实现语音信息之间的匹配识别;
Z33:通过公式YP=α2×ZW+α3×JW获取语音匹配系数YP;其中α2和α3为预设比例系数;
Z34:当语音匹配系数YP>L2时,则判定语音信息与语音特征信息匹配成功,并将语音分析系数YF赋值为1;否则,判定语音信息与语音特征信息匹配失败,并将语音分析系数YF赋值为0;其中L2为预设语音匹配系数阈值;
Z4:通过公式GS=SF×YF获取感应识别系数GS;当感应识别系数GS>L3时,则通过处理器发送资料调取指令至资料调取模块;否则,处理器不发送任何指令;其中L3为预设感应识别系数阈值;
Z5:通过处理器将视频分析系数、语音分析系数和资料调取指令发送记录发送至数据存储模块,所述资料调取指令发送记录包括资料调取指令和资料调取指令发送时间;
所述资料调取模块用于调取学习资料,具体调取步骤为:
X1:资料调取模块接收到资料调取指令之后,启动命令处理单元,所述命令处理单元用于获取关键字匹配结果,具体获取步骤为:
X11:通过语音采集单元获取用户的语音信息;
X12:通过命令处理单元对语音信息进行特征提取,并将特征提取的关键字标记为待分析关键字;
X13:将待分析关键字与学科关键字逐一进行匹配,并将关键字匹配结果标记为GZ;
X14:当关键字匹配结果GZ为空时,发送自动调取指令至自动调取单元;当关键字匹配结果GZ非空时,发送关键字调取指令至语音调取单元;所述关键字匹配结果GZ非空时,GZ则表示学科关键字中的其中一项;
X2:当自动调取单元接收到自动调取指令时,自动调取单元对学习资料进行调取,具体调取步骤为:
X21:通过数据存储模块获取预设的语音特征信息,并将语音特征信息标记为XYi,i=1,2,……,n;
X22:将语音信息与语音特征信息进行匹配,在匹配成功后获取编号i;
X23:通过数据存储模块获取编号i在上一次学习结束时的学习资料;
X24:将X23中所述的学习资料通过处理器发送至显示控制模块;
X3:当语音调取模块接收到关键字调取指令时,通过数据存储模块学科关键字匹配结果GZ对应的学习资料;并将学习资料发送至显示控制模块;
X4:通过处理器将自动调取指令发送记录、语音调取指令发送记录和学习资料发送记录发送至数据存储模块。
优选的,所述显示控制模块用于播放学习资料,所述显示控制模块包括触摸显示屏和扬声器;用户通过点击触摸显示屏可控制学习资料的播放过程;所述触摸显示屏的右上角显示智能教育机器人的剩余电量。
优选的,所述资料调取模块包括命令处理单元、语音调取单元和自动调取单元。
优选的,所述学习资料包括语文学习资料、数学学习资料、英语学习资料、音乐学习资料、舞蹈学习资料、书法学习资料和美术学习资料,所述学科关键字包括语文、数学、英语、音乐、舞蹈、书法和美术。
优选的,所述语音特征信息是用户使用智能教育机器人学习时,智能教育机器人记录的用户的语音特征信息。
优选的,所述电源管理模块用于管理智能教育机器人的电源,所述电源管理模块包括电源和电源分析单元,具体管理步骤为:
C1:实时获取电源的剩余电量,并将剩余电量标记为SD,通过处理器将剩余电量SD发送至显示控制模块,显示控制模块实时显示剩余电量,同时将剩余电量发送至电源分析单元;
C2:当剩余电量SD≤L4时,通过处理器发送电源不足指令至显示控制模块,其中L4为预设剩余电量阈值;
C3:在电源不足指令发送后的L5分钟时,通过处理器控制智能教育机器人进入休眠状态,其中L5为预设时间阈值;
C4:当智能教育机器人处于休眠状态时,通过显示控制模块提示用户进行充电。
优选的,所述视频分析系数获取步骤为:
Z21:对视频信息进行视频预处理,所述视频预处理包括视频镜头分割、关键帧提取和视频特征提取;
Z22:获取视频信息中的待分析人物图像,对待分析人物图像进行图像预处理,同时通过数据存储模块获取预先存储的标准人物图像,所述标准人物图像是用户的全身图像;所述图像预处理包括灰度变换、图像纠正、图像裁剪和图像增强;
Z23:通过特征匹配法对待分析人物图像和标准人物图像进行多次匹配分析,并将匹配概率和匹配精度标记为PG和PJ;基于特征匹配法进行图像匹配是现有技术,论文《一种基于图像特征点的图像匹配算法》中的方法可实现图像匹配;
Z24:通过公式
Z25:当图像匹配系数TP>L1时,则判定待分析人物图像与标准人物图像匹配成功,并将视频分析系数SF赋值为1;否则,判定待分析人物图像与标准人物图像匹配失败,并将视频分析系数SF赋值为0;其中L1为预设图像匹配系数阈值。
优选的,所述匹配概率为正确匹配次数和总的匹配次数之比,所述匹配精度为正确匹配的匹配误差均方差。
优选的,所述待分析人物图像是从视频信息关键帧中裁剪的人物图像。
优选的,所述交互信息包括视频信息和语音信息,所述感应识别模块包括视频采集单元和语音采集单元,所述视频采集单元设置在智能教育机器人眼睛所在的位置,所述语音采集单元设置在智能教育机器人耳朵所在的位置;所述感应识别模块与处理器电性连接。
优选的,所述学习内容分析模块用于分析用户学习的内容,具体分析步骤为:
N1:通过数据存储模块获取用户的学习时间,所述学习时间为用户对学习资料的学习时长,并将学习时间标记为XSj,j=1,2,……,m;j表示第j个学习资料;
N2:对学习时间XSj从大到小进行排序;并通过公式
N3:求取学习时间最大值和最小值之间的差值,并将差值标记为CZ;
N4:通过公式XF=γ1×XSP×e
N5:当XF>L6,则判定用户存在偏科现象,则通过处理器发送偏科提醒至预设智能终端;当XF≤L6,将学习时间最大的科目标记为爱好科目,并通过处理器将爱好科目发送至预设智能终端;
N6:通过处理器将偏科提醒发送记录和爱好科目发送记录发送至数据存储模块。
优选的,所述视频信息为通过视频采集单元获取的智能教育机器人前侧的视频,所述语音信息为语音采集单元获取的智能机器人方圆K1米的声音信号,所述语音特征信息为数据存储模块中存储的用户的声音信号;其中K1为预设距离阈值。
与现有技术相比,本发明的有益效果是:
1、本发明设置了感应识别模块,该设置用于采集和识别用户的交互信息;通过视频采集单元获取智能教育机器人前侧的视频信息,通过语音采集单元获取语音信息;并将视频信息和语音信息发送至处理器;处理器接收到视频信息之后,对视频信息进行分析获取视频分析系数;处理器接收到语音信息之后,对语音信息进行分析获取语音分析系数;通过公式获取感应识别系数,当感应识别系数大于预设感应识别系数阈值时,则通过处理器发送资料调取指令至资料调取模块,否则,处理器不发送任何指令;感应识别模块通过视频采集单元和语音采集单元获取交互信息,对交互信息处理并获取感应识别系数,通过分析感应识别系数来判断是否调取学习资料,在提高学习资料调取的准确性的同时保证了智能教育机器人的节能型;
2、本发明设置了资料调取模块,该设置用于调取学习资料;资料调取模块接收到资料调取指令之后,启动命令处理单元,通过命令处理单元获取关键字匹配结果,当关键字匹配结果为空时,发送自动调取指令至自动调取单元;当关键字匹配结果非空时,发送关键字调取指令至语音调取单元;当自动调取单元接收到自动调取指令时,自动调取单元对学习资料进行调取;当语音调取模块接收到关键字调取指令时,通过数据存储模块学科关键字匹配结果GZ对应的学习资料;并将学习资料发送时显示控制模块;资料调取模块包括自动调取单元和语音调取单元,增加了学习资料调取的智能性;
3、本发明设置了电源管理模块,该设置用于管理智能教育机器人的电源;实时获取电源的剩余电量,并将剩余电量标记为SD,通过处理器将剩余电量SD发送至显示控制模块,显示控制模块实时显示剩余电量,同时将剩余电量发送至电源分析单元;当剩余电量SD≤L4时,通过处理器发送电源不足指令至显示控制模块,其中L4为预设剩余电量阈值;在电源不足指令发送后的L5分钟时,通过处理器控制智能教育机器人进入休眠状态,其中L5为预设时间阈值;当智能教育机器人处于休眠状态时,通过显示控制模块提示用户进行充电;电源管理模块通过电源分析单元对电源的剩余电量进行分析,并发送提醒至显示控制模块,有助于防止突然断电造成数据存储模块中的学习资料损坏。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的原理示意图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1,一种智能教育机器人用教学资料调取系统,包括处理器、感应识别模块、资料调取模块、电源管理模块、数据存储模块、显示控制模块和学习内容分析模块;
感应识别模块用于采集和识别用户的交互信息,具体采集步骤为:
Z1:通过视频采集单元获取智能教育机器人前侧的视频信息,通过语音采集单元获取语音信息;并将视频信息和语音信息发送至处理器;
Z2:处理器接收到视频信息之后,对视频信息进行分析获取视频分析系数SF;
Z3:处理器接收到语音信息之后,对语音信息进行分析获取语音分析系数YF,具体获取步骤为:
Z31:通过数据存储模块获取预先存储的语音特征信息;
Z32:将语音信息和语音特征信息进行匹配识别,获取字错误率和句错误率,并将字错误率和句错误率分别标记为ZW和JW;其中语音信息的匹配识别为现有技术,论文《基于语义关联的终端模糊语音高精度识别方法》中基于语音关联的终端模糊语音高精度识别方法能够实现语音信息之间的匹配识别;
Z33:通过公式YP=α2×ZW+α3×JW获取语音匹配系数YP;其中α2和α3为预设比例系数;
Z34:当语音匹配系数YP>L2时,则判定语音信息与语音特征信息匹配成功,并将语音分析系数YF赋值为1;否则,判定语音信息与语音特征信息匹配失败,并将语音分析系数YF赋值为0;其中L2为预设语音匹配系数阈值;
Z4:通过公式GS=SF×YF获取感应识别系数GS;当感应识别系数GS>L3时,则通过处理器发送资料调取指令至资料调取模块;否则,处理器不发送任何指令;其中L3为预设感应识别系数阈值;
Z5:通过处理器将视频分析系数、语音分析系数和资料调取指令发送记录发送至数据存储模块,资料调取指令发送记录包括资料调取指令和资料调取指令发送时间;
资料调取模块用于调取学习资料,具体调取步骤为:
X1:资料调取模块接收到资料调取指令之后,启动命令处理单元,命令处理单元用于获取关键字匹配结果,具体获取步骤为:
X11:通过语音采集单元获取用户的语音信息;
X12:通过命令处理单元对语音信息进行特征提取,并将特征提取的关键字标记为待分析关键字;
X13:将待分析关键字与学科关键字逐一进行匹配,并将关键字匹配结果标记为GZ;
X14:当关键字匹配结果GZ为空时,发送自动调取指令至自动调取单元;当关键字匹配结果GZ非空时,发送关键字调取指令至语音调取单元;关键字匹配结果GZ非空时,GZ则表示学科关键字中的其中一项;
X2:当自动调取单元接收到自动调取指令时,自动调取单元对学习资料进行调取,具体调取步骤为:
X21:通过数据存储模块获取预设的语音特征信息,并将语音特征信息标记为XYi,i=1,2,……,n;
X22:将语音信息与语音特征信息进行匹配,在匹配成功后获取编号i;
X23:通过数据存储模块获取编号i在上一次学习结束时的学习资料;
X24:将X23中的学习资料通过处理器发送至显示控制模块;
X3:当语音调取模块接收到关键字调取指令时,通过数据存储模块学科关键字匹配结果GZ对应的学习资料;并将学习资料发送至显示控制模块;
X4:通过处理器将自动调取指令发送记录、语音调取指令发送记录和学习资料发送记录发送至数据存储模块。
进一步地,显示控制模块用于播放学习资料,显示控制模块包括触摸显示屏和扬声器;用户通过点击触摸显示屏可控制学习资料的播放过程;触摸显示屏的右上角显示智能教育机器人的剩余电量。
进一步地,资料调取模块包括命令处理单元、语音调取单元和自动调取单元。
进一步地,学习资料包括语文学习资料、数学学习资料、英语学习资料、音乐学习资料、舞蹈学习资料、书法学习资料和美术学习资料,学科关键字包括语文、数学、英语、音乐、舞蹈、书法和美术。
进一步地,电源管理模块用于管理智能教育机器人的电源,电源管理模块包括电源和电源分析单元,具体管理步骤为:
C1:实时获取电源的剩余电量,并将剩余电量标记为SD,通过处理器将剩余电量SD发送至显示控制模块,显示控制模块实时显示剩余电量,同时将剩余电量发送至电源分析单元;
C2:当剩余电量SD≤L4时,通过处理器发送电源不足指令至显示控制模块,其中L4为预设剩余电量阈值;
C3:在电源不足指令发送后的L5分钟时,通过处理器控制智能教育机器人进入休眠状态,其中L5为预设时间阈值;
C4:当智能教育机器人处于休眠状态时,通过显示控制模块提示用户进行充电。
进一步地,视频分析系数获取步骤为:
Z21:对视频信息进行视频预处理,视频预处理包括视频镜头分割、关键帧提取和视频特征提取;
Z22:获取视频信息中的待分析人物图像,对待分析人物图像进行图像预处理,同时通过数据存储模块获取预先存储的标准人物图像,标准人物图像是用户的全身图像;图像预处理包括灰度变换、图像纠正、图像裁剪和图像增强;
Z23:通过特征匹配法对待分析人物图像和标准人物图像进行多次匹配分析,并将匹配概率和匹配精度标记为PG和PJ;基于特征匹配法进行图像匹配是现有技术,论文《一种基于图像特征点的图像匹配算法》中的方法可实现图像匹配;
Z24:通过公式
Z25:当图像匹配系数TP>L1时,则判定待分析人物图像与标准人物图像匹配成功,并将视频分析系数SF赋值为1;否则,判定待分析人物图像与标准人物图像匹配失败,并将视频分析系数SF赋值为0;其中L1为预设图像匹配系数阈值。
进一步地,匹配概率为正确匹配次数和总的匹配次数之比,匹配精度为正确匹配的匹配误差均方差。
进一步地,待分析人物图像是从视频信息关键帧中裁剪的人物图像。
进一步地,交互信息包括视频信息和语音信息,感应识别模块包括视频采集单元和语音采集单元,视频采集单元设置在智能教育机器人眼睛所在的位置,语音采集单元设置在智能教育机器人耳朵所在的位置;感应识别模块与处理器电性连接。
进一步地,视频信息为通过视频采集单元获取的智能教育机器人前侧的视频,语音信息为语音采集单元获取的智能机器人方圆K1米的声音信号,语音特征信息为数据存储模块中存储的用户的声音信号;其中K1为预设距离阈值。
进一步地,学习内容分析模块用于分析用户学习的内容,具体分析步骤为:
N1:通过数据存储模块获取用户的学习时间,学习时间为用户对学习资料的学习时长,并将学习时间标记为XSj,j=1,2,……,m;j表示第j个学习资料;
N2:对学习时间XSj从大到小进行排序;并通过公式
N3:求取学习时间最大值和最小值之间的差值,并将差值标记为CZ;
N4:通过公式XF=γ1×XSP×e
N5:当XF>L6,则判定用户存在偏科现象,则通过处理器发送偏科提醒至预设智能终端;当XF≤L6,将学习时间最大的科目标记为爱好科目,并通过处理器将爱好科目发送至预设智能终端;
N6:通过处理器将偏科提醒发送记录和爱好科目发送记录发送至数据存储模块。
上述公式均是去量化取其数值计算,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况设定。
本发明的工作原理:
通过视频采集单元获取智能教育机器人前侧的视频信息,通过语音采集单元获取语音信息;并将视频信息和语音信息发送至处理器;处理器接收到视频信息之后,对视频信息进行分析获取视频分析系数;处理器接收到语音信息之后,对语音信息进行分析获取语音分析系数;通过公式获取感应识别系数,当感应识别系数大于预设感应识别系数阈值时,则通过处理器发送资料调取指令至资料调取模块,否则,处理器不发送任何指令;
资料调取模块接收到资料调取指令之后,启动命令处理单元,通过命令处理单元获取关键字匹配结果,当关键字匹配结果为空时,发送自动调取指令至自动调取单元;当关键字匹配结果非空时,发送关键字调取指令至语音调取单元;当自动调取单元接收到自动调取指令时,自动调取单元对学习资料进行调取;当语音调取模块接收到关键字调取指令时,通过数据存储模块学科关键字匹配结果GZ对应的学习资料;并将学习资料发送时显示控制模块;
电源管理模块用于管理智能教育机器人的电源,实时获取电源的剩余电量,并将剩余电量标记为SD,通过处理器将剩余电量SD发送至显示控制模块,显示控制模块实时显示剩余电量,同时将剩余电量发送至电源分析单元;当剩余电量SD≤L4时,通过处理器发送电源不足指令至显示控制模块,其中L4为预设剩余电量阈值;在电源不足指令发送后的L5分钟时,通过处理器控制智能教育机器人进入休眠状态,其中L5为预设时间阈值;当智能教育机器人处于休眠状态时,通过显示控制模块提示用户进行充电。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种智能教育机器人用教学资料调取系统
- 一种基于安卓系统的智能教育机器人