基于球卫星的全自主月面导航和数据通信方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及月球卫星导航与通信技术领域,特别地,涉及一种基于球卫星的全自主月面导航和数据通信方法。
背景技术
月球上具有丰富的矿藏资源,其中很多资源在地球上属于稀有元素,对地球上的经济活动具有重要意义,将对人类社会可持续发展产生重要贡献。月表岩屑中富含稀有气体元素,其中氦-3是可控核聚变的燃料,比氘、氚具有更多的优点。同时,月球低重力环境也为开展科学试验提供了优越的条件。在人类开展月面活动时,需要诸多基础设施条件的支持,其中月面导航和数据通信是最重要的支撑条件之一,保证月面上的宇航员准确定位目标对象,实时传输数据。考虑到人类登月任务早期阶段缺乏月面设施的支持,因此需要借助环月星座实现全月面的高精度导航与数据通信。
现有的文献1《张宇,曹建峰,谢剑锋,陈明,段建锋.基于地基无线电测量的月面用户精确定位技术研究.电子测量与仪器学报,2013,27(10):907-915》研究了基于当前地基无线电进行月面导航定位的技术途径,分析了月面着陆点和月面巡视器的定位精度。分析可知,在当前地基无线电测控技术条件下,月面用户定位精度优于百米量级。但是由于月球有一面始终朝向地球而另一面始终背向地球,因此地基无线电手段无法实现全月面的导航定位。同时,由于地基测量距离较远,因此月面用户导航定位精度有限,难以满足高精度的全月面导航。
现有的专利CN201410827871.0公开了一种基于太阳、地心及月表重力矢量的巡视器位置姿态确定方法,首先,根据月面重力矢量确定巡视器的倾斜姿态,即确定俯仰角和方位角,然后,通过星历计算和敏感器测量获取太阳矢量和地心矢量,最后,基于双矢量定姿原理确定巡视器的月表位置和运动方向。但是,其需要月面用户能够同时观测到太阳、地球,并且需要高精度的月球重力场模型,因而使用的时间范围受到限制,且导航定位精度有限。
现有的文献3《谭龙玉,贺亮,彭杨,王兆龙,曹涛.一种长距离高可靠月面巡视自主导航方法.载人航天,2018,24(3):340-345.》针对月面非结构环境下的高精度导航需求,提出了一种组合惯性、视觉、天文测量的长距离高可靠自主导航方法,仿真表明其位置确定精度优于60m。但是,其需要月面用户携带惯性、视觉、天文观测载荷,对目标能力要求较高,如果月面用户不具备这些载荷,那么将无法应用该方法,适用范围有限。
现有的文献4《孙泽洲,韩宇,黄晓峰,刘适,李雄飞,陈之纯,张婷,强晖萍.嫦娥三号探测器月面通信系统设计与验证.中国科学:技术科学,2014,44(5):433-439.》针对嫦娥三号探测器,设计了UHF频段月面通信系统,实现了巡视器对着陆器的数据传输在轨验证。但是,其仅针对嫦娥三号任务开展巡视器对着陆器的通信验证,尚无法实现月面任意两点之间的互联互通。
因此,目前的月面用户导航定位方法主要局限于地基远距离无线电测量,或者通过月面用户本身携带的惯性、视觉、天文等敏感器获取测量数据来实现月面导航定位,其精度在百米或亚百米量级,导航定位精度较低。对于全月面数据通信任务需求,尚缺乏有效的月面基础通信设施支撑,难以实现月面任意地点之间的快速有效数据通信。针对未来载人登月任务,迫切需要一种专用的全月面高精度导航定位与数据通信方法。
发明内容
本发明提供了一种基于球卫星的全自主月面导航和数据通信方法,以解决现有的月面用户导航定位方法存在的定位精度差且难以实现月面任意两点之间快速通信的技术问题。
根据本发明的一个方面,提供一种基于球卫星的全自主月面导航和数据通信方法,包括以下步骤:
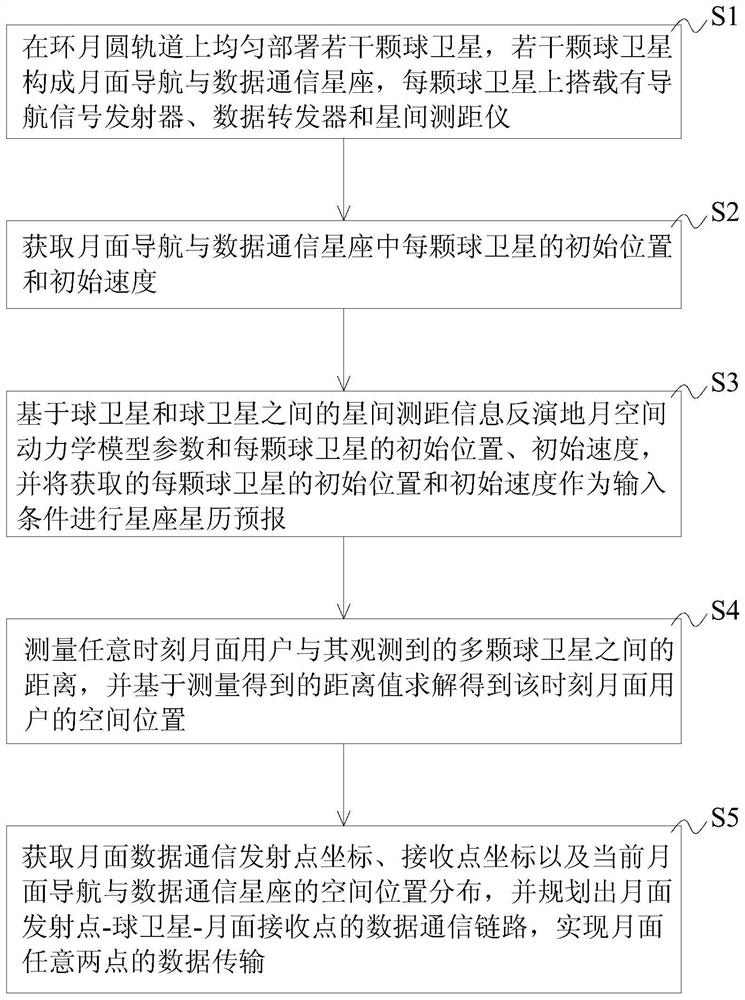
步骤S1:在环月圆轨道上均匀部署若干颗球卫星,若干颗球卫星构成月面导航与数据通信星座,每颗球卫星上搭载有导航信号发射器、数据转发器和星间测距仪;
步骤S2:获取月面导航与数据通信星座中每颗球卫星的初始位置和初始速度;
步骤S3:基于球卫星和球卫星之间的星间测距信息反演地月空间动力学模型参数和每颗球卫星的初始位置、初始速度,并将获取的每颗球卫星的初始位置和初始速度作为输入条件进行星座星历预报;
步骤S4:测量任意时刻月面用户与其观测到的多颗球卫星之间的距离,并基于测量得到的距离值求解得到该时刻月面用户的空间位置;
步骤S5:获取月面数据通信发射点坐标、接收点坐标以及当前月面导航与数据通信星座的空间位置分布,并规划出月面发射点-球卫星-月面接收点的数据通信链路,实现月面任意两点的数据传输。
进一步地,所述步骤S3包括以下步骤:
步骤S31:构建任意两颗球卫星的星间距离、星间距离变化率与地月空间动力学模型参数之间的关系式;
步骤S32:通过星间测距仪测量得到任意两颗球卫星之间的星间距离和星间距离变化率;
步骤S33:基于上述关系式和测量结果联合求解得到地月空间动力学模型参数和球卫星的初始状态修正值;
步骤S34:每间隔一段时间重复执行上述步骤S31-S33以得到最新的地月空间动力学模型参数以及每颗球卫星的初始位置、初始速度,利用最新的球卫星初始位置、初始速度和地月空间动力学模型参数进行星座星历预报。
进一步地,所述步骤S1还包括以下步骤:
以降低空间位置精度因子和提高月面覆盖性作为设计目标不断迭代优化星座构型参数。
进一步地,所述月面覆盖性指的是在月面任意一点在任意时刻能够观测到至少四颗球卫星;
所述空间位置精度因子通过以下步骤得到:
假设星座中有N颗球卫星,月面用户相对于这些球卫星的仰角和方位角分别为θ
定义几何矩阵G和权系矩阵H:
H=(G
则空间位置精度因子为
其中,h
进一步地,所述步骤S4中求解月面用户空间位置的过程具体包括以下步骤:
步骤S41:建立月面用户与球卫星之间的距离计算表达式;
步骤S42:测量任一时刻月面用户与其观测到的至少四颗球卫星之间的距离;
步骤S43:基于上述计算表达式和距离测量结果联合求解得到月面用户的空间位置。
进一步地,所述步骤S42中通过月面用户接收机的伪距、载波相位或者多普勒频移测量得到任意时刻月面用户与球卫星的距离。
进一步地,所述步骤S4还包括以下内容:
设置球卫星的导航信号发射功率。
进一步地,所述步骤S5中在进行月面任意两点的数据传输之前还包括以下内容:
设置球卫星的中继信号发射功率。
进一步地,基于以下公式来计算球卫星的导航信号发射功率或中继信号发射功率:
其中,P
进一步地,所述步骤S2中通过地基无线电测量手段获取每颗球卫星的初始位置和初始状态。
本发明具有以下效果:
本发明的基于球卫星的全自主月面导航与数据通信方法,通过选择环月圆轨道作为导航卫星运行轨道,可以有效地覆盖月面,确保月面任意一点在任意时刻可以接收到有效的导航卫星信号,为确保后续的导航精度提供支持。并且,采取球卫星作为导航卫星,已知其初始状态的条件下可以获取较长时间内的轨道预报值。另外,通过星间测距进行动力学模型参数的反演,可以获取高精度的动力学模型,实现了星座星历的高精度预报以支撑星座长期全自主运行,实现了不依赖于地面的月面导航全自主运行。并且,通过月面用户与其观测到的多颗球卫星之间的距离测量求解得到月面用户的空间位置,可以为月面活动提供精确的目标位置、速度以及实施高效的数据通信服务,可以实现月面任意点的导航定位以及月面任意两点之间的数据传输,可以很好地满足载人登月活动任务需求。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例的基于球卫星的全自主月面导航与数据通信方法的流程示意图。
图2是本发明优选实施例的图1中步骤S3的子流程示意图。
图3是本发明优选实施例的图1中步骤S4中求解月面用户空间位置过程的子流程示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
如图1所示,本发明的优选实施例提供一种基于球卫星的全自主月面导航和数据通信方法,包括以下步骤:
步骤S1:在环月圆轨道上均匀部署若干颗球卫星,若干颗球卫星构成月面导航与数据通信星座,每颗球卫星上搭载有导航信号发射器、数据转发器和星间测距仪;
步骤S2:获取月面导航与数据通信星座中每颗球卫星的初始位置和初始速度;
步骤S3:基于球卫星和球卫星之间的星间测距信息反演地月空间动力学模型参数和每颗球卫星的初始位置、初始速度,并将获取的每颗球卫星的初始位置和初始速度作为输入条件进行星座星历预报;
步骤S4:测量任意时刻月面用户与其观测到的多颗球卫星之间的距离,并基于测量得到的距离值求解得到该时刻月面用户的空间位置;
步骤S5:获取月面数据通信发射点坐标、接收点坐标以及当前月面导航与数据通信星座的空间位置分布,并规划出月面发射点-球卫星-月面接收点的数据通信链路,实现月面任意两点的数据传输。
可以理解,在所述步骤S1中,选择环月圆轨道作为星座运行轨道,其轨道高度在2000km~5000km范围内,星座运行轨道包含了若干个轨道面,这些轨道面的升交点沿月球赤道均匀分布,在每个轨道面上均匀分布若干颗球卫星,从而可以保证月面任意点在任意时刻可以观测到多颗球卫星,形成对月面的有效覆盖,确保月面任意一点在任意时刻可以接收到有效的导航卫星信号,为确保后续的导航精度提供支持。另外,采用球卫星作为导航卫星,球卫星的优点在于其外形为各向同性,动力学特性简单,根据卫星外形参数就可以精确计算太阳光压等摄动力,根据高精度引力模型可以计算月球、太阳、地球等引力,这样,就可以精确地确定球卫星的受力状态,在已知其初始状态的条件下可以获取较长时间内的轨道预报值。所述球卫星的外形为标准球体,构成卫星的平台结构,球卫星的内部搭载有三类关键载荷,分别是导航信号发射器,其用于广播测距码、导航电文、载波信号等导航信息,为月面导航提供信息服务;数据转发器,用于实现月面不同任务对象之间的数据通信;星间测距仪,可采用微波或激光测距装置,用于获取两颗球卫星之间的距离及其变化率,为后续的月球重力场、太阳光压等地月空间动力学模型参数反演提供观测数据,以获取高精度的动力学模型以及球卫星初始位置、初始速度,为星座星历预报提供支持。
可以理解,本实施例的基于球卫星的全自主月面导航与数据通信方法,通过选择环月圆轨道作为导航卫星运行轨道,可以有效地覆盖月面,确保月面任意一点在任意时刻可以接收到有效的导航卫星信号,为确保后续的导航精度提供支持。并且,采取球卫星作为导航卫星,已知其初始状态的条件下可以获取较长时间内的轨道预报值。另外,通过星间测距进行动力学模型参数的反演,可以获取高精度的动力学模型,实现了星座星历的高精度预报以支撑星座长期全自主运行,实现了不依赖于地面的月面导航全自主运行。并且,通过月面用户与其观测到的多颗球卫星之间的距离测量求解得到月面用户的空间位置,可以为月面活动提供精确的目标位置、速度以及实施高效的数据通信服务,可以实现月面任意点的导航定位以及月面任意两点之间的数据传输,可以很好地满足载人登月活动任务需求。
可以理解,作为优选的,所述步骤S1还包括以下步骤:
以降低空间位置精度因子和提高月面覆盖性作为设计目标,不断迭代优化星座构型参数。
其中,月面覆盖性指的是在月面任意一点在任意时刻能够观测到至少四颗球卫星,进一步确保星座可以有效覆盖整个月面,并且也为后续的月面用户空间位置求解提供数据支持。而空间位置精度因子(PDOP)要求指的是月面任意一点相对可观测导航卫星的几何结构较好,而PDOP值则越小越好。具体地,所述空间位置精度因子通过以下步骤得到:
假设星座中有N颗球卫星,月面用户相对于这些球卫星的仰角和方位角分别为θ
定义几何矩阵G和权系矩阵H:
H=(G
则空间位置精度因子为
其中,h
可以理解,所述步骤S1中通过以降低PDOP值和提高月面覆盖性作为优化目标,不断迭代优化星座构型参数,直至满足一定的迭代次数或者PDOP值小于阈值且月面任意一点在任意时刻能够观测到至少四颗球卫星,迭代终止。其中,星座构型参数包括但不限于星座中的球卫星的运动参数、球卫星之间的距离参数、球卫星之间的角度参数等。
具体地,所述步骤S2中通过地基无线电测量手段获取星座中每颗球卫星的初始位置x
可以理解,在该月面导航与数据通信星座中,球卫星和球卫星之间存在高精度激光星间测距或者微波星间测距,可以用于敏感地月引力场、太阳光压、三体引力等动力学模型参数,每隔一定时间进行星上数据处理,获取最新的地月空间动力学模型参数。
如图2所示,所述步骤S3包括以下步骤:
步骤S31:构建任意两颗球卫星的星间距离、星间距离变化率与地月空间动力学模型参数之间的关系式;
步骤S32:通过星间测距仪测量得到任意两颗球卫星之间的星间距离和星间距离变化率;
步骤S33:基于上述关系式和测量结果联合求解得到地月空间动力学模型参数和球卫星的初始状态修正值;
步骤S34:每间隔一段时间重复执行上述步骤S31-S33以得到最新的地月空间动力学模型参数以及每颗球卫星的初始位置、初始速度,利用最新的球卫星初始位置、初始速度和地月空间动力学模型参数进行星座星历预报。
具体地,设需要考虑的月球引力场位系数为C
ρ
由于球卫星的位置和速度都是三维空间中的矢量,则上式中含有n+m+p+12个未知数,求解出这些未知数至少需要(n+m+p+12)/2个采样点的星间距离和星间距离变化率,求解得到的这n+m+p+12个未知数中除地月空间动力学参数外,还包括球卫星i、j的初始状态修正值x
对于月面导航和数据通信星座中任意两颗球卫星均建立上述关系式,然后利用高精度激光星间测距或者微波星间测距测量得到两颗球卫星之间的星间距离值和星间距离变化率值,然后联合求解得到地月空间动力学模型参数和球卫星的初始状态修正值(C
每隔一定时间通过星间测距数据处理得到最新的地月空间动力学模型参数后,结合修正后的球卫星初始状态,进行星历预报,从而实现星座星历的长期高精度、全自主获取,支撑星座长期全自主运行,实现不依赖于地面的月面导航全自主运行。
可以理解,所述步骤S3中提出了星座导航任务全自主运行方法,在星座上利用球卫星与球卫星之间的星间测距信息反演地月动力学模型,然后利用更新后的动力学模型、星座初始状态参数进行星座星历的高精度预报,实现不依赖于地面的月面导航全自主运行。
另外,基于步骤S1可知,月面任意一点(x,y,z)在任意时刻可以观测到N颗球卫星,N≥4,根据步骤S3可知,这些球卫星的空间位置可以通过星历预报自主获取,设为
如图3所示,所述步骤S4中求解月面用户空间位置的过程具体包括以下步骤:
步骤S41:建立月面用户与球卫星之间的距离计算表达式;
步骤S42:测量任一时刻月面用户与其观测到的至少四颗球卫星之间的距离;
步骤S43:基于上述计算表达式和距离测量结果联合求解得到月面用户的空间位置。
具体地,月面用户与球卫星之间的距离计算表达式为:
其中,c为光速,δt为导航卫星和月面用户之间的时间差,
所述步骤S42中通过月面用户接收机的伪距、载波相位或者多普勒频移测量得到任意时刻月面用户与多颗球卫星的距离。
这里仅有四个未知数,即月面用户位置(x,y,z)和时间差δt。由于月面任意一点(x,y,z)在任意时刻可以观测到至少4颗球卫星,对观测到的N颗导航卫星均建立上述方程,即可联立求解得到月面用户的空间位置(x,y,z),在得到月面用户的准确位置后,即可进行后续的高精度导航和数据转发。
可以理解,作为优选的,所述步骤S4还包括以下内容:
设置球卫星的导航信号发射功率。
具体地,基于以下公式来计算球卫星的导航信号发射功率:
其中,P
月面用户接收机的伪距、载波相位或者多普勒频移测量得到任意时刻月面用户与多颗球卫星的距离
可以理解,在所述步骤S5中,月面数据通信发射点坐标和接收点坐标均可通过上述步骤S4求解得到,而当前月面导航与数据通信星座的空间位置分布则通过星座星历预报自主获取,从而基于发射点坐标、接收点坐标以及当前月面导航与数据通信星座的空间位置分布规划出数据通信链路,实现月面任意两点的数据传输。
作为优选的,所述步骤S5中在进行月面任意两点的数据传输之前还包括以下内容:
设置球卫星的中继信号发射功率。
具体地,基于以下公式来计算球卫星的中继信号发射功率:
其中,P
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于球卫星的全自主月面导航和数据通信方法
- 基于立方体纳卫星的全自主月面导航与数据通信方法