一种包装袋撑袋落料系统及方法
文献发布时间:2023-06-19 10:02:03
技术领域
本发明涉及包装设备领域,尤其涉及一种包装袋撑袋落料系统及方法。
背景技术
物料包装设备,是把物料包装起来的一类机器,起到保护物料和便于运输的作用。主要适合于大米、食品、制糖、化工等行业物料的全自动定量包装。物料包装设备在工作时主要包括:包装袋上料、包装袋撑开、物料灌装、包装袋输送和包装袋封口等过程。而包装过程的好坏直接关系到包装袋的封口质量、物料灌装重量的准确性和包装袋内物料紧实程度。因此,对于物料包装来说,其使用的包装设备质量就显得尤为重要。
中国发明专利申请(公开号CN107264878B,公开日:20190212)公开了一种全自动包装设备,包括自动上袋机、自动定量包装秤、自动理袋机和自动缝包机。本发明的包装设备适应不同包装规格的功能,对于不同大小的包装规格,一键切换,避免了大量的调整,实现傻瓜式操作,降低了对车间操作工人专业技能的要求,以实现多功能全自动包装机的性能。本发明采用模块化设计理念,能够兼容这两种一字型包装袋,节约了人工成本,提高效率。且本发明预留人工操作位,人工上袋模式和自动上袋模式可以随时切换,在实际生产过程中,自动上袋机出现故障可切换为人工理袋模式,不会影响用户正常生产。
现有技术存在以下不足:1、将包装袋撑开输送时,开袋机构先将包装袋撑开,而后翻转夹取机构中的气爪手将撑开后的包装袋夹取;同时翻转夹取机构中的撑袋气缸带动两个撑开平板将包装袋内侧上下面继续撑开,最后翻转夹取机构带动保持撑开的包装袋旋转至灌装工位完成包装袋撑开输送过程;而翻转夹取机构中的气爪手夹取包装袋时为气缸直接驱动夹爪将包装袋夹取;但气缸制造精度较低并且气缸轴和气缸壁之间容易磨损,频繁夹取包装袋后气缸轴和气缸壁会因为磨损而产生较大的缝隙;从而造成气缸轴在带动夹爪运动时会相对于气缸壁产生晃动,造成夹爪不能精确的将包装袋夹取;同时,翻转夹取机构中撑开包装袋时为两个撑袋气缸分别带动各自的撑袋平板上下转动将包装袋撑开;而此种撑开方式需要两个撑袋气缸分别工作,造成撑袋气缸的数量较多,增加了设备的复杂度。2、对包装袋进行灌装时,抓袋机构先将撑开的包装袋抓紧;而后将物料沿着落料滑道灌装至撑开的包装袋中,抓袋机构将灌装后的包装袋直接松开下料完成包装袋灌装过程;而抓袋机构将包装袋抓紧时包装袋为撑开状态,抓袋机构将灌装后的包装袋松开下落时包装袋也为撑开状态;当灌装后的包装袋底部与接收输送装置相接触时包装袋底部会受到一定的冲击,包装袋内部灌装的物料受到冲击后会沿着开口的包装袋散落出来导致需要再次灌装,从而降低了包装袋的灌装效率。
发明内容
本发明的目的是:针对上述问题,提出通过设置撑袋装置保证包装袋的精确夹取,降低设备的复杂度;通过设置落料装置避免包装袋内部物料散落,提高包装袋的灌装效率的一种包装袋撑袋落料系统及方法。
为了实现上述的目的,本发明采用了以下的技术方案:
一种包装袋撑袋落料系统,该系统包括机架和固定在机架上的撑袋装置和落料装置;撑袋装置输入端与上袋装置输出端相衔接,撑袋装置输出端与落料装置输出端相衔接;落料装置输入端与物料进料口相衔接,落料装置输出端与接收输送装置输入端相衔接;撑袋装置用于将包装袋袋口撑开;落料装置用于物料的定量落料;落料装置包括落料滑道和固定在落料滑道上的抓袋机构和滑道开启机构;落料滑道固定在机架上,落料滑道输入端和输出端分别与物料进料口和滑道开启机构输入端相衔接;抓袋机构输出端与包装袋相接触,抓袋机构输出端分别与撑袋装置输出端和滑道开启机构输出端相衔接,并且滑道开启机构输出端与撑开的包装袋入口相衔接;落料滑道用于对物料进行导向输送;抓袋机构用于提拉包装袋;滑道开启机构用于控制物料是否从落料滑道出口落入包装袋。
作为优选,撑袋装置包括开袋机构和翻转夹取机构;开袋机构和翻转夹取机构都固定在机架上;开袋机构输入端与上袋装置输出端相衔接,开袋机构输出端分别与包装袋上下表面相接触,并且开袋机构输出端与翻转夹取机构输入端相衔接;翻转夹取机构输出端与包装袋相接触,并且翻转夹取机构输出端与落料装置输出端相衔接;开袋机构用于将包装袋袋口撑开;翻转夹取机构用于将撑开的包装袋翻转搬移至落料装置进行灌装。翻转夹取机构包括夹取机架、夹取电机、夹取转轴、夹取插刀和夹取机械手;夹取电机固定在夹取机架上,夹取电机输出端与夹取转轴相连接,并且夹取插刀和夹取机械手都固定在夹取转轴上;夹取插刀包括插刀机架、插刀气缸和插刀头;插刀气缸与插刀机架相铰接,并且插刀气缸输出端与插刀头相铰接;插刀头包括插刀头杆部和插刀头撑开部;插刀头杆部与插刀头撑开部组合为钩状结构,并且在插刀气缸的带动下插刀头撑开部与包装袋内部相接触或者分离;夹取机械手包括机械手机架、夹取气缸、第一夹取片和第二夹取片;第一夹取片和第二夹取片都包括夹取齿轮;第一夹取片和第二夹取片都与机械手机架相铰接,并且第一夹取片的夹取齿轮和第二夹取片的夹取齿轮相互啮合;夹取气缸与机械手机架相铰接,并且夹取气缸输出端和第一夹取片相连接;在夹取气缸的带动下,第一夹取片和第二夹取片分别通过各自的夹取齿轮相互啮合转动将包装袋夹取或者松开。插刀头撑开部中部为掏空结构;翻转夹取机构还包括减震器;减震器固定在夹取机架上,并且多个减震器分别位于机械手机架前后端;多个减震器输出端分别与机械手机架前后转动末端位置相衔接;开袋机构包括上吸取组件、下吸取组件和开袋导板;开袋导板进料口与上袋装置输出端相衔接,并且开袋导板上表面与包装袋下表面相接触;上吸取组件和下吸取组件分别位于开袋导板出料口上下端,并且上吸取组件输出端和下吸取组件输出端分别与包装袋上下表面相接触。
作为优选,上吸取组件包括上吸取气缸、上吸取架和上吸取盘;上吸取气缸固定在机架上,上吸取气缸输出端与上吸取架相连接;上吸取架与上吸取盘相连接,上吸取盘输出端与包装袋上表面相接触;下吸取组件包括下吸取座、下吸取架和下吸取盘;下吸取座固定在机架上,下吸取座与下吸取架相连接;下吸取架与下吸取盘相连接,并且下吸取盘输出端与包装袋下表面相接触;下吸取架穿过下吸取座相应孔位,并且下吸取架通过穿过下吸取座相应孔位的螺钉固定;开袋导板为倾斜板,并且开袋导板出料口高度低于开袋导板进料口高度;上吸取盘和下吸取盘分别通过上吸取架和下吸取架内部通孔与真空装置相连通。
作为优选,抓袋机构包括抓袋驱动气缸、抓袋转动杆、第一转动连杆、第二转动连杆和抓袋机械手;抓袋驱动气缸和抓袋转动杆中部分别与落料滑道相应轴柱相铰接,抓袋驱动气缸输出端与抓袋转动杆相连接;第一转动连杆输入端和第二转动连杆输入端分别与抓袋转动杆首尾两端相铰接;抓袋机械手包括机械手固定杆和抓取夹紧元件;机械手固定杆与落料滑道相铰接,并且多个抓袋机械手的机械手固定杆分别与第一转动连杆输出端和第二转动连杆输出端相铰接;抓取夹紧元件固定在机械手固定杆上,并且抓取夹紧元件输出端与包装袋入口处相接触;在抓袋驱动气缸带动下,多个抓袋机械手沿着其与落料滑道铰接处旋转将包装袋开口拉紧封闭或者松开;抓取夹紧元件用于夹紧包装袋开口。抓取夹紧元件包括夹紧气缸、夹紧机架、夹紧转块和夹紧块;多个夹紧转块与夹紧机架相铰接,并且夹紧转块尾端凸起与夹紧气缸输出端相铰接;夹紧块固定在夹紧转块首端,夹紧气缸收缩时上拉夹紧转块尾端凸起带动夹紧转块向内转动,多个夹紧块收缩将包装袋开口夹紧;夹紧块为长方形夹块;机械手固定杆包括固定杆连杆和固定杆转动杆;固定杆转动杆与落料滑道相铰接,并且固定杆转动杆与固定杆连杆一端相连接;不同固定杆连杆另一端分别与第一转动连杆和第二转动连杆输出端相铰接;落料滑道为漏斗形状,并且落料滑道输入端开口面积大于输出端开口面积;滑道开启机构包括开启气缸、开启连杆和开启门;开启气缸输出端与开启连杆输入端相铰接,开启连杆输出端与开启门相铰接,并且开启门输出端与撑开的包装袋入口相衔接。滑道开启机构还包括灌装撑开气缸和灌装撑开板;灌装撑开气缸和灌装撑开板分别与开启门相铰接,并且灌装撑开气缸输出端与灌装撑开板相铰接;灌装撑开板与包装袋入口内侧相接触;灌装撑开板为长方形板。
另外,本发明还公开了一种包装袋撑袋落料方法,该方法采用所述一种包装袋撑袋落料系统,该方法包括以下的步骤:
(一)包装袋撑袋:1)上袋装置将包装袋上料至开袋导板;2)下吸取盘将包装袋下表面吸取,上吸取气缸动作带动上吸取盘将包装袋上表面吸取上移将包装袋撑开;3)夹取电机转动带动夹取插刀和夹取机械手运动至撑袋工位,夹取气缸动作带动第一夹取片与第二夹取片相啮合转动将包装袋入口边缘夹紧;同时,插刀气缸动作带动插刀头转动,插刀头撑开部与撑开的包装袋内部相接触使包装袋保持撑开状态;4)夹取电机转动带动夹取插刀和夹取机械手运动至灌装工位,落料装置将撑开的包装袋接收完成包装袋撑袋过程;
(二)物料落料:1)抓袋机械手将撑袋装置输送的包装袋抓取,灌装撑开气缸动作带动灌装撑开板运动将包装袋保持撑开状态;2)开启气缸带动开启连杆动作将开启门开启;3)将物料倒入落料滑道进料口,物料沿着落料滑道落料至撑开的包装袋中4)设定重量的物料落入包装袋后,灌装撑开板收回,开启门关闭;抓袋驱动气缸动作依次带动抓袋转动杆、第一转动连杆、第二转动连杆运动使得抓袋机械手沿着其与落料滑道铰接处旋转将包装袋开口拉紧封闭;5)接收输送装置将开口封闭的包装袋接收完成物料落料过程。
本发明采用上述技术方案的一种包装袋撑袋落料系统及方法的优点是:
1、通过设置翻转夹取机构;开袋机构将包装袋撑开后,夹取电机转动带动夹取插刀和夹取机械手运动至撑袋工位,夹取气缸动作带动第一夹取片与第二夹取片相啮合转动将包装袋入口边缘夹紧;同时,插刀气缸动作带动插刀头转动,插刀头撑开部与撑开的包装袋内部相接触使包装袋保持撑开状态;夹取电机转动带动夹取插刀和夹取机械手运动至灌装工位,落料装置将撑开的包装袋接收完成包装袋撑袋过程。而第一夹取片和第二夹取片都包括夹取齿轮;夹取包装袋侧边时,夹取气缸带动第一夹取片和第二夹取片通过两者的夹取齿轮相互啮合将包装袋侧边夹取;而齿轮制造精度较高使用寿命较长并且齿轮之间相互啮合间隙较小,频繁夹取包装袋后两齿轮之间依然能够保持较高的啮合精度;从而避免了气缸带动气爪频繁夹取包装袋时气缸轴相对于气缸壁产生晃动的情况,保证了包装袋的夹取精度。同时,插刀头杆部与插刀头撑开部组合为钩状结构,钩状结构的插刀头撑开部相对于撑袋平板的长条结构有着更大的撑开距离;在撑开包装袋时,只需要插刀头撑开部钩状结构首尾端与包装袋内侧接触即可将包装袋撑开;即只需要带动插刀头一个零件转动就能将包装袋撑开;从而使得只需要一个驱动气缸工作就能将包装袋撑开,减少了驱动气缸的数量,降低了设备的复杂度。
2、通过设置抓袋机构;设定重量的物料落入包装袋后,灌装撑开板收回,开启门关闭;抓袋驱动气缸动作依次带动抓袋转动杆、第一转动连杆、第二转动连杆运动使得抓袋机械手沿着其与落料滑道铰接处旋转将包装袋开口拉紧封闭;接收输送装置将开口封闭的包装袋接收完成物料落料过程。而此种落料方式落料后抓袋驱动气缸将包装袋开口拉紧封闭;当包装袋内部灌装的物料受到冲击后,包装袋内部向出口运动的物料会被开口封闭的包装袋阻挡;从而避免了包装袋开口时内部灌装的物料受到冲击后会散落出来的情况,提高了包装袋的灌装效率。
附图说明
图1为本发明的结构示意图。
图2为包装袋的产品结构示意图。
图3为撑袋装置的结构示意图。
图4为翻转夹取机构的结构示意图。
图5为夹取机械手的结构示意图。
图6为开袋机构的结构示意图。
图7为落料装置的结构示意图。
图8为抓袋机构的结构示意图。
图9为滑道开启机构的结构示意图。
具体实施方式
下面结合附图对本发明的具体实施方式进行详细的说明。
实施例1
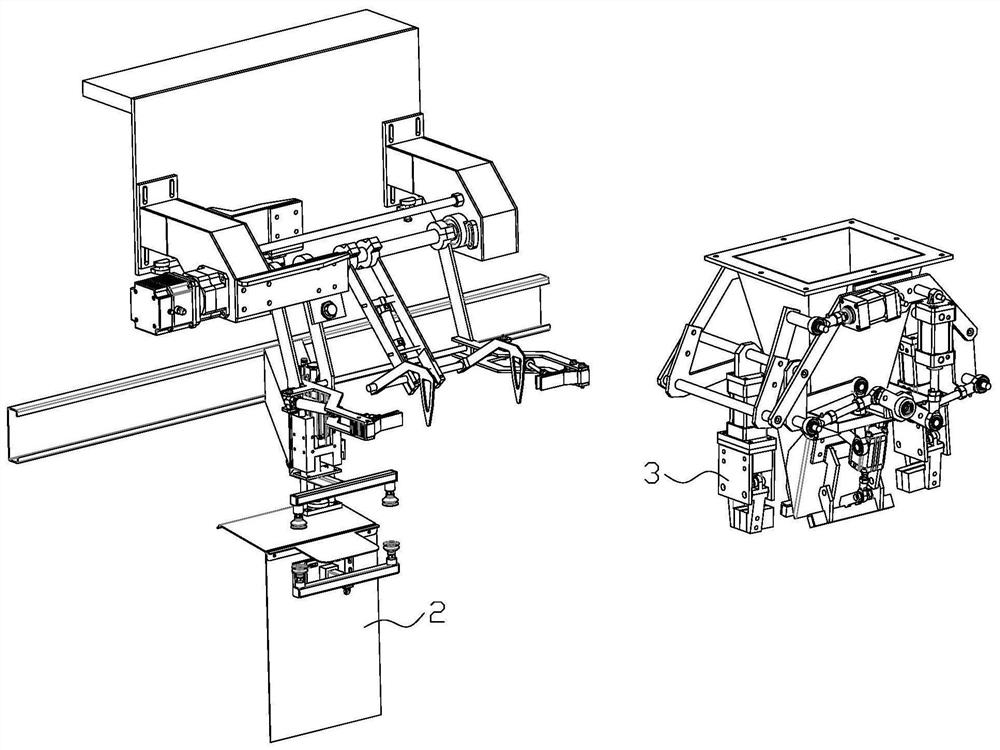
如图1所示的一种包装袋撑袋落料系统,该系统包括机架和固定在机架上的撑袋装置2和落料装置3;撑袋装置2输入端与上袋装置输出端相衔接,撑袋装置2输出端与落料装置3输出端相衔接;落料装置3输入端与物料进料口相衔接,落料装置3输出端与接收输送装置输入端相衔接;撑袋装置2用于将包装袋袋口撑开;落料装置3用于物料的定量落料。
包装袋的产品流动方向为:撑袋装置2到落料装置3。
如图2所示为包装袋的产品结构示意图。包装袋a包括包装袋底部b和包装袋入口c:物料从撑开的包装袋入口c进入包装袋a落入包装袋底部b;接收输送装置对包装袋底部b进行撞击从而将包装袋a内部的物料敦实。
如图3所示,撑袋装置2包括开袋机构21和翻转夹取机构22;开袋机构21和翻转夹取机构22都固定在机架上;开袋机构21输入端与上袋装置输出端相衔接,开袋机构21输出端分别与包装袋上下表面相接触,并且开袋机构21输出端与翻转夹取机构22输入端相衔接;翻转夹取机构22输出端与包装袋相接触,并且翻转夹取机构22输出端与落料装置3输出端相衔接;开袋机构21用于将包装袋袋口撑开;翻转夹取机构22用于将撑开的包装袋翻转搬移至落料装置3进行灌装。
如图4、图5所示,翻转夹取机构22包括夹取机架23、夹取电机24、夹取转轴25、夹取插刀26和夹取机械手27;夹取电机24固定在夹取机架23上,夹取电机24输出端与夹取转轴25相连接,并且夹取插刀26和夹取机械手27都固定在夹取转轴25上;夹取插刀26包括插刀机架261、插刀气缸262和插刀头263;插刀气缸262与插刀机架261相铰接,并且插刀气缸262输出端与插刀头263相铰接;插刀头263包括插刀头杆部264和插刀头撑开部265;插刀头杆部264与插刀头撑开部265组合为钩状结构,并且在插刀气缸262的带动下插刀头撑开部265与包装袋内部相接触或者分离;夹取机械手27包括机械手机架271、夹取气缸272、第一夹取片273和第二夹取片274;第一夹取片273和第二夹取片274都包括夹取齿轮275;第一夹取片273和第二夹取片274都与机械手机架271相铰接,并且第一夹取片273的夹取齿轮275和第二夹取片274的夹取齿轮275相互啮合;夹取气缸272与机械手机架271相铰接,并且夹取气缸272输出端和第一夹取片273相连接;在夹取气缸272的带动下,第一夹取片273和第二夹取片274分别通过各自的夹取齿轮275相互啮合转动将包装袋夹取或者松开;插刀头撑开部265中部为掏空结构。
如图3所示,翻转夹取机构22还包括减震器28;减震器28固定在夹取机架23上,并且多个减震器28分别位于机械手机架271前后端;多个减震器28输出端分别与机械手机架271前后转动末端位置相衔接。
如图6所示,开袋机构21包括上吸取组件211、下吸取组件212和开袋导板213;开袋导板213进料口与上袋装置输出端相衔接,并且开袋导板213上表面与包装袋下表面相接触;上吸取组件211和下吸取组件212分别位于开袋导板213出料口上下端,并且上吸取组件211输出端和下吸取组件212输出端分别与包装袋上下表面相接触;上吸取组件211包括上吸取气缸2111、上吸取架2112和上吸取盘2113;上吸取气缸2111固定在机架上,上吸取气缸2111输出端与上吸取架2112相连接;上吸取架2112与上吸取盘2113相连接,上吸取盘2113输出端与包装袋上表面相接触;下吸取组件212包括下吸取座2121、下吸取架2122和下吸取盘2123;下吸取座2121固定在机架上,下吸取座2121与下吸取架2122相连接;下吸取架2122与下吸取盘2123相连接,并且下吸取盘2123输出端与包装袋下表面相接触;下吸取架2122穿过下吸取座2121相应孔位,并且下吸取架2122通过穿过下吸取座2121相应孔位的螺钉固定;开袋导板213为倾斜板,并且开袋导板213出料口高度低于开袋导板213进料口高度;上吸取盘2113和下吸取盘2123分别通过上吸取架2112和下吸取架2122内部通孔与真空装置相连通。
撑袋装置2在工作过程中:1)上袋装置将包装袋上料至开袋导板213;2)下吸取盘2123将包装袋下表面吸取,上吸取气缸2111动作带动上吸取盘2113将包装袋上表面吸取上移将包装袋撑开;3)夹取电机24转动带动夹取插刀26和夹取机械手27运动至撑袋工位,夹取气缸272动作带动第一夹取片273与第二夹取片274相啮合转动将包装袋入口边缘夹紧;同时,插刀气缸262动作带动插刀头263转动,插刀头撑开部265与撑开的包装袋内部相接触使包装袋保持撑开状态;4)夹取电机24转动带动夹取插刀26和夹取机械手27运动至灌装工位,落料装置3将撑开的包装袋接收完成包装袋撑袋过程。
撑袋装置2解决了将包装袋撑开输送时,开袋机构先将包装袋撑开,而后翻转夹取机构中的气爪手将撑开后的包装袋夹取;同时翻转夹取机构中的撑袋气缸带动两个撑开平板将包装袋内侧上下面继续撑开,最后翻转夹取机构带动保持撑开的包装袋旋转至灌装工位完成包装袋撑开输送过程;而翻转夹取机构中的气爪手夹取包装袋时为气缸直接驱动夹爪将包装袋夹取;但气缸制造精度较低并且气缸轴和气缸壁之间容易磨损,频繁夹取包装袋后气缸轴和气缸壁会因为磨损而产生较大的缝隙;从而造成气缸轴在带动夹爪运动时会相对于气缸壁产生晃动,造成夹爪不能精确的将包装袋夹取;同时,翻转夹取机构中撑开包装袋时为两个撑袋气缸分别带动各自的撑袋平板上下转动将包装袋撑开;而此种撑开方式需要两个撑袋气缸分别工作,造成撑袋气缸的数量较多,增加了设备的复杂度的问题。通过设置翻转夹取机构22;开袋机构21将包装袋撑开后,夹取电机24转动带动夹取插刀26和夹取机械手27运动至撑袋工位,夹取气缸272动作带动第一夹取片273与第二夹取片274相啮合转动将包装袋入口边缘夹紧;同时,插刀气缸262动作带动插刀头263转动,插刀头撑开部265与撑开的包装袋内部相接触使包装袋保持撑开状态;夹取电机24转动带动夹取插刀26和夹取机械手27运动至灌装工位,落料装置3将撑开的包装袋接收完成包装袋撑袋过程。而第一夹取片273和第二夹取片274都包括夹取齿轮275;夹取包装袋侧边时,夹取气缸272带动第一夹取片273和第二夹取片274通过两者的夹取齿轮275相互啮合将包装袋侧边夹取;而齿轮制造精度较高使用寿命较长并且齿轮之间相互啮合间隙较小,频繁夹取包装袋后两齿轮之间依然能够保持较高的啮合精度;从而避免了气缸带动气爪频繁夹取包装袋时气缸轴相对于气缸壁产生晃动的情况,保证了包装袋的夹取精度。同时,插刀头杆部264与插刀头撑开部265组合为钩状结构,钩状结构的插刀头撑开部265相对于撑袋平板的长条结构有着更大的撑开距离;在撑开包装袋时,只需要插刀头撑开部265钩状结构首尾端与包装袋内侧接触即可将包装袋撑开;即只需要带动插刀头263一个零件转动就能将包装袋撑开;从而使得只需要一个驱动气缸工作就能将包装袋撑开,减少了驱动气缸的数量,降低了设备的复杂度。
如图7所示,落料装置3包括落料滑道31和固定在落料滑道31上的抓袋机构32和滑道开启机构33;落料滑道31固定在机架上,落料滑道31输入端和输出端分别与物料进料口和滑道开启机构33输入端相衔接;抓袋机构32输出端与包装袋相接触,抓袋机构32输出端分别与撑袋装置2输出端和滑道开启机构33输出端相衔接,并且滑道开启机构33输出端与撑开的包装袋入口相衔接;落料滑道31用于对物料进行导向输送;抓袋机构32用于提拉包装袋;滑道开启机构33用于控制物料是否从落料滑道31出口落入包装袋。
如图8所示,抓袋机构32包括抓袋驱动气缸34、抓袋转动杆35、第一转动连杆36、第二转动连杆37和抓袋机械手38;抓袋驱动气缸34和抓袋转动杆35中部分别与落料滑道31相应轴柱相铰接,抓袋驱动气缸34输出端与抓袋转动杆35相连接;第一转动连杆36输入端和第二转动连杆37输入端分别与抓袋转动杆35首尾两端相铰接;抓袋机械手38包括机械手固定杆381和抓取夹紧元件382;机械手固定杆381与落料滑道31相铰接,并且多个抓袋机械手38的机械手固定杆381分别与第一转动连杆36输出端和第二转动连杆37输出端相铰接;抓取夹紧元件382固定在机械手固定杆381上,并且抓取夹紧元件382输出端与包装袋入口处相接触;在抓袋驱动气缸34带动下,多个抓袋机械手38沿着其与落料滑道31铰接处旋转将包装袋开口拉紧封闭或者松开;抓取夹紧元件382用于夹紧包装袋开口。抓取夹紧元件382包括夹紧气缸3821、夹紧机架3822、夹紧转块3823和夹紧块3824;多个夹紧转块3822与夹紧机架3822相铰接,并且夹紧转块3822尾端凸起与夹紧气缸3821输出端相铰接;夹紧块3824固定在夹紧转块3823首端,夹紧气缸3821收缩时上拉夹紧转块3822尾端凸起带动夹紧转块3823向内转动,多个夹紧块3824收缩将包装袋开口夹紧;夹紧块3824为长方形夹块;机械手固定杆381包括固定杆连杆3811和固定杆转动杆3812;固定杆转动杆3812与落料滑道31相铰接,并且固定杆转动杆3812与固定杆连杆3811一端相连接;不同固定杆连杆3811另一端分别与第一转动连杆36和第二转动连杆37输出端相铰接;落料滑道31为漏斗形状,并且落料滑道31输入端开口面积大于输出端开口面积。
如图9所示,滑道开启机构33包括开启气缸331、开启连杆332和开启门333;开启气缸331输出端与开启连杆332输入端相铰接,开启连杆332输出端与开启门333相铰接,并且开启门333输出端与撑开的包装袋入口相衔接;滑道开启机构33还包括灌装撑开气缸334和灌装撑开板335;灌装撑开气缸334和灌装撑开板335分别与开启门333相铰接,并且灌装撑开气缸334输出端与灌装撑开板335相铰接;灌装撑开板335与包装袋入口内侧相接触;灌装撑开板335为长方形板。
落料装置3在工作过程中:1)抓袋机械手38将撑袋装置2输送的包装袋抓取,灌装撑开气缸334动作带动灌装撑开板335运动将包装袋保持撑开状态;2)开启气缸331带动开启连杆332动作将开启门333开启;3)将物料倒入落料滑道31进料口,物料沿着落料滑道31落料至撑开的包装袋中4)设定重量的物料落入包装袋后,灌装撑开板335收回,开启门333关闭;抓袋驱动气缸34动作依次带动抓袋转动杆35、第一转动连杆36、第二转动连杆37运动使得抓袋机械手38沿着其与落料滑道31铰接处旋转将包装袋开口拉紧封闭;5)接收输送装置将开口封闭的包装袋接收完成物料落料过程。
落料装置3解决了对包装袋进行灌装时,抓袋机构先将撑开的包装袋抓紧;而后将物料沿着落料滑道灌装至撑开的包装袋中,抓袋机构将灌装后的包装袋直接松开下料完成包装袋灌装过程;而抓袋机构将包装袋抓紧时包装袋为撑开状态,抓袋机构将灌装后的包装袋松开下落时包装袋也为撑开状态;当灌装后的包装袋底部与接收输送装置相接触时包装袋底部会受到一定的冲击,包装袋内部灌装的物料受到冲击后会沿着开口的包装袋散落出来导致需要再次灌装,从而降低了包装袋的灌装效率的问题。通过设置抓袋机构32;设定重量的物料落入包装袋后,灌装撑开板335收回,开启门333关闭;抓袋驱动气缸34动作依次带动抓袋转动杆35、第一转动连杆36、第二转动连杆37运动使得抓袋机械手38沿着其与落料滑道31铰接处旋转将包装袋开口拉紧封闭;接收输送装置将开口封闭的包装袋接收完成物料落料过程。而此种落料方式落料后抓袋驱动气缸34将包装袋开口拉紧封闭;当包装袋内部灌装的物料受到冲击后,包装袋内部向出口运动的物料会被开口封闭的包装袋阻挡;从而避免了包装袋开口时内部灌装的物料受到冲击后会散落出来的情况,提高了包装袋的灌装效率。
- 一种包装袋撑袋落料系统及方法
- 一种碳酸钙粉吨袋包装落料系统及方法