一种多采样率的低功耗微机械陀螺数字信号处理方法
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及微机械谐振器,尤其涉及一种多采样率的低功耗微机械陀螺数字信号处理方法。
背景技术
微机械谐振器在时变驱动力或者驱动电压的作用下发生内部结构之间的相对机械运动,产生运动信号,这运动信号经过设置的高频载波调制后由接口电路转换成便于处理的电压信号,通过模数转换器进入数字电路进行数字信号处理。陀螺数字信号处理系统通常包括两个回路,驱动模态的控制回路和检测模态的检测回路。两个回路都需要对输入的调制信号进行载波解调、正交解调以获取相关信号的幅度信息和相位信息,以便进行进一步控制和输出,其中驱动回路需要对提取的幅度和相位进行闭环控制,通常采用自动增益控制和锁相环控制;检测回路解调输出的同相分量即包含角速度信息。
传统的微机械陀螺的数字信号处理算法采用固定时钟采样频率,致使载波解调后得到的低频运动信号处理模块运行在高频时钟下,高频时钟采样和翻转引入高数字动态功耗,致使微机械陀螺数字动态功耗偏大。
传统的陀螺信号解调方式一般为乘法解调,乘法解调是理想情况下的解调,解调输出易受相乘信号影响,抗噪性能差,同时会产生二倍频信号,需要配合低通滤波器,引入额外相移,解调结果输出受限于滤波器的性能。
发明内容
本发明的目的是克服现有技术的不足,为微机械陀螺提供一种多采样率的低功耗微机械陀螺数字信号处理方法。
本发明的具体方案如下:
本发明首先提供了一种多采样率的低功耗微机械陀螺数字信号处理方法,其是采用多级时钟管理驱动各个数字信号处理模块;接口电路将谐振器的被高频载波调制的运动信号在一级时钟采样率下通过模数转换器转成电压信号;欠采样解调模块包含两级抽取滤波器,分别在一级时钟和二级时钟下工作,抽取后实现降采样和载波解调,得到驱动模态和检测模态的运动信号;傅里叶级数解调模块将运动信号在三级时钟下解调得到同相分量和正交分量;通信模块工作在四级时钟下,把检测模态的同相分量输出到上位机;幅度相位提取模块工作在三级时钟下,对驱动模态的同相分量和正交分量进行数学运算求得幅度和相位,对其进行自动增益控制和锁相环控制得到幅度调整量和频率调整量;驱动力产生模块工作在三级时钟下,通过幅度调整量和频率调整量得到驱动力,通过数模转换器进入到模拟部分;载波产生模块工作在一级时钟下,控制载波频率为微机械谐振频率的整数倍,通过数模转换器进入到模拟部分。通过多级时钟管理,使不同数字信号处理模块工作在多级采样率下,降低数字动态功耗。通过傅里叶解调算法实现解调,相比乘法解调省略了低通滤波环节,消除滤波器引入的时间延迟和相位滞后,避免了滤波残余分量对解调结果的影响,且有更好的抗噪性能。
本发明的的多采样率的低功耗微机械陀螺数字信号处理方法,具体包括如下步骤:
1)时钟产生管理模块以微机械陀螺谐振频率为基准时钟,通过对固定主频分频输出四级时钟采样频率,作为不同数字信号处理模块的时钟信号;
2)微机械陀螺的接口电路将微机械陀螺的被高频载波调制的驱动模态和检测模态运动信号转成电压信号,通过模数转换器以一级时钟频率采样输入欠采样解调模块进行载波解调;
3)欠采样解调模块工作在一级时钟频率和二级时钟频率下,对输入的运动信号进行两级滤波和抽取降低采样率至载波频率,实现载波解调并输出驱动和检测的振动位移信号,将其输入到傅里叶级数解调模块;
3)傅里叶级数解调模块工作在三级时钟频率下,对输入的信号进行正交解调,求取正交分量和同相分量,对于驱动模态,将同相分量和正交分量输入到幅度相位提取模块;对于检测模态,同相分量包含角速度信息,输出到通信模块;
4)幅度相位提取模块工作在三级时钟频率下,对输入的信号进行数学运算,得到驱动模态运动位移信号幅度和相位值,把幅度值输入自动增益控制环路,相位值输入锁相环控制环路,自动增益控制环路输出幅度调整值到驱动力产生模块、锁相环控制环路输出频率调整值到驱动力产生模块;
5)驱动力产生模块工作在三级时钟频率下,通过输入的信号调整驱动力信号幅值和频率,输出驱动力信号到数模转换器进入模拟部分;
6)载波产生模块工作在一级时钟频率下,输出载波信号到数模转换器进入模拟部分。;
7)通信模块工作在四级时钟频率下,对输入的信号进行异步转换,发送到上位机。
进一步地,所述的时钟管理模块以控制环路输出的微机械陀螺谐振频率作为时钟基准对主频进行分频,其中一级时钟采样率(abnω
进一步地,所述欠采样解调模块的欠采样解调处理是在一级时钟采样率下对输入的运动信号进行降采样,通过积分梳状滤波器滤波抽取降采样,在二级时钟采样率下进行带通多相抽取滤波器滤波抽取,两次抽取把采样率降到三级时钟采样率。通过把欠采样把频谱搬移到基频实现载波解调,同时降低采样率。
进一步地,所述的傅里叶级数解调处理是在三级时钟采样率下对输入的信号作解调处理,三级时钟采样率为待解调信号的整数倍,把待解调信号分成两路,一路与余弦表相乘求积分后得到同相分量,另一路与正弦表相乘求积分后得到正交分量,同相直流分量和正交直流分量输入至幅度相位提取模块。
进一步地,所述的载波产生模块工作在一级时钟下,输出载波频率等于三级时钟频率(nω
进一步地,驱动力产生模块工作在三级时钟下,通过输入的幅度调整值和频率调整值输出驱动力,控制驱动模态位移响应幅值稳定,驱动力频率等于微机械陀螺谐振频率,输出到数模转换器施加到模拟部分。
本发明与现有技术相比具有的有益效果是:
1)本发明的多级时钟管理能有效降低时钟频率和吞吐量,灵活控制各个数字信号处理模块工作在合适的时钟频率下,克服了现有微机械陀螺数字控制系统全局固定高频时钟引入的数字动态功耗浪费,在不损失微机械陀螺性能的前提下有效大幅降低数字动态功耗。
2)本发明采用的欠采样解调算法可以通过欠采样抽取实现载波解调,不需要额外的解调实现的同时克服了现有技术引入二倍频分量的问题,降低了后续数字信号处理模块的采样率,从而有效降低数字系统动态功耗。
3)本发明采用的傅里叶解调算法相比现有传统乘法解调有更强的抗噪声能力,且可以省略低通滤波器,消除滤波器引入的时间延迟和相位滞后,避免了滤波残余分量对解调结果的影响,从而有效改善微机械陀螺的性能。
附图说明
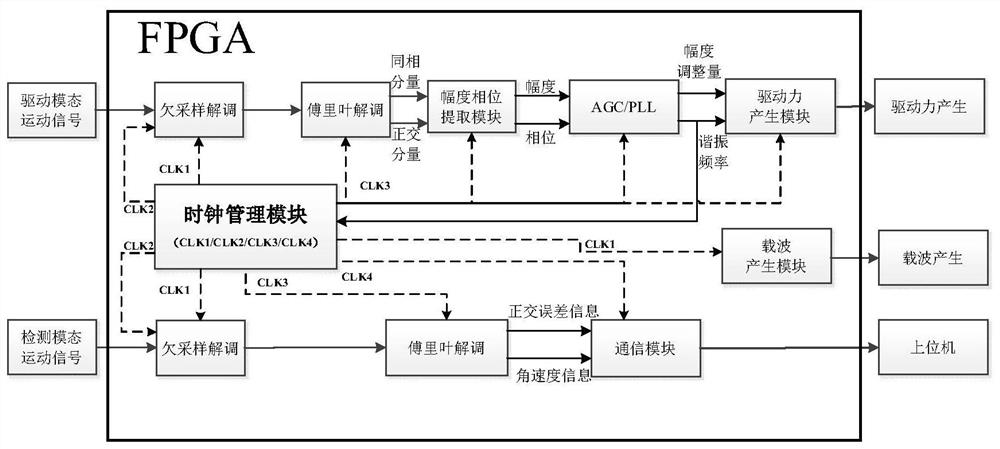
图1是一种多采样率的低功耗微机械陀螺数字信号处理算法实现框图;
图2是本发明的时钟管理模块的实现框图;
图3是本发明的接口电路的常见形式图;
图4是本发明的欠采样解调模块的实现框图;
图5是本发明的傅里叶解调模块的实现框图;
图6是本发明的幅度相位提取模块的实现框图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,在本发明的一个实施例中,多采样率的低功耗微机械陀螺数字信号处理系统包括微机械谐振器、接口电路、时钟管理模块、欠采样解调模块、傅里叶级数解调模块、幅度相位提取模块、自动增益控制环路、锁相环控制环路、驱动力产生模块、载波产生模块和通信模块;
所述的接口电路用于将微机械谐振器的被高频载波调制的运动信号转成电压信号,输入欠采样解调模块;
所述的时钟管理模块以微机械陀螺谐振频率作为基准时钟,输出四级时钟至不同的数字信号处理模块;其中,时钟管理模块输出一级时钟作为模数转换器、载波产生模块和欠采样解调模块采样时钟;输出二级时钟作为欠采样解调模块多相带通抽取滤波器时钟;输出三级时钟作为傅里叶级数解调模块、幅度相位提取模块、自动增益控制环路、锁相环控制环路和驱动力产生模块采样时钟;输出四级时钟频率为固定高频时钟,作为通信模块采样时钟;
所述的欠采样解调模块对输入的运动信号进行载波解调处理,并输入至傅里叶级数解调模块;
所述的傅里叶级数解调模块对输入的信号求取同相分量和正交分量;对于驱动模态,输入至幅度相位提取模块;对于检测模态,输入通信模块;
所述的谐振幅度信号提取模块对驱动模态同相分量和正交分量进行数学运算,得到谐振幅度值和谐振相位值,输入自动增益控制环路和锁相环环路。
所述的自动增益控制环路对幅值和幅值参考值做差后进行反馈控制得到幅度调整值,输入驱动力产生模块;所述的锁相环控制环路对相位和相位参考值做差后进行反馈控制得到相位调整值,输入驱动力产生模块;
所述的驱动力产生模块对幅度调整值和频率调整值作为幅度和频率值,得到实时调整的驱动力信号,输入至数模转换器施加到微机械陀螺极板上;
所述的载波产生模块工作在一级时钟下,控制载波频率等于三级时钟频率,得到实时调整的载波信号,输入数模转换器施加到微机械陀螺质量块上进行调制;
所述的通信模块工作在四级时钟下,对输入的检测模态同相分量进行异步转换后发送到上位机。
如图1所示,在一个具体实施例中,所述多采样率的低功耗微机械陀螺数字信号处理方法,具体包括如下步骤:
1)时钟产生管理模块以微机械陀螺谐振频率为基准时钟,通过对固定主频分频输出四级时钟采样频率,作为不同数字信号处理模块的时钟信号。
2)微机械陀螺的接口电路将微机械陀螺的被高频载波调制的驱动模态和检测模态运动信号转成电压信号,通过模数转换器以一级时钟频率采样输入欠采样解调模块进行载波解调;
3)欠采样解调模块工作在一级时钟频率和二级时钟频率下,对输入的运动信号进行两级滤波和抽取降低采样率至载波频率,实现载波解调并输出驱动和检测的振动位移信号,将其输入到傅里叶级数解调模块。
3)傅里叶级数解调模块工作在三级时钟频率下,对输入的信号进行正交解调,求取正交分量和同相分量,对于驱动模态,将同相分量和正交分量输入到幅度相位提取模块;对于检测模态,同相分量包含角速度信息,输出到通信模块;
4)幅度相位提取模块工作在三级时钟频率下,对输入的信号进行数学运算,得到驱动模态运动位移信号幅度和相位值,把幅度值输入自动增益控制环路,相位值输入锁相环控制环路,自动增益控制环路输出幅度调整值到驱动力产生模块,锁相环控制环路输出频率调整值到驱动力产生模块。
5)驱动力产生模块工作在三级时钟频率下,通过输入的信号调整驱动力信号幅值和频率,输出驱动力信号到数模转换器进入模拟部分。
6)载波产生模块工作在一级时钟频率下,输出载波信号到数模转换器进入模拟部分。
7)通信模块工作在四级时钟频率下,对输入的信号进行异步转换,发送到上位机。
所述的时钟产生管理模块产生四级时钟信号,图2给出了时钟产生管理模块实现框图,其中一级时钟采样率(abnω
所述的微机械谐振器的运动信号由高频载波调制后经过接口电路转换成电压信号。图3给出了接口电路的常见形式,由运算放大器组成的高通滤波器可以允许高频载波调制的运动信号通过,而不让电路的低频噪声通过。一般地谐振器的运动信号x(t)表示为
其中,cos(ω
所述的欠采样解调模块通过对输入的信号进行两级滤波抽取,把采样率降低到载波频率的同时实现载波解调,输出驱动和检测的振动位移信号。
如图4所示,所述的欠采样解调模块的解调处理是由工作在一级时钟下的模数转换器对接口电路的输出电压进行采样量化后输入运动信号X,在一级时钟(采样频率为abnω
接口电路输入的运动信号X频谱公式如下:
欠采样解调模块通过把采样率降低到载波频率ω
频谱X
如图5所示,所述的傅里叶解调模块工作在三级时钟下,采样周期为信号周期的n倍,解调处理是对输入的信号分成两路,一路与余弦表相乘求积分后得到同相分量,另一路与正弦表相乘求积分后得到正交分量,同相直流分量和正交直流分量输入至幅度相位提取模块。
输入傅里叶解调模块的信号形式如下:
对其进行傅里叶级数展开,得到一次谐波分量的正交分量a
在数字域中,对模拟信号进行采样后得到离散量化后的采样值,并通过梯形法求和实现积分,令NΔt=T,
其中,n为每基频周期内的采样点数,x(k)为周期内第k个采样值。
对每基频周期内采样值分别与余弦表、正弦表相乘累加积分后求得同相分量和正交分量,实现正交解调。
如图6所示,所述的相位提取模块可以通过坐标旋转数字计算方法实现对同相直流分量与正交直流分量的平方和进行开根号操作求得幅值,以及对正交直流分量与同相直流分量的商求反正切值获得相位。
本发明的多采样率的低功耗微机械陀螺数字信号处理方法,其采用多级时钟管理驱动各个数字信号处理模块;接口电路将谐振器的被高频载波调制的运动信号在一级时钟采样率下通过模数转换器转成电压信号;欠采样解调模块包含两级抽取滤波器,分别在一级时钟和二级时钟下工作,抽取后实现降采样和载波解调,得到驱动模态和检测模态的运动信号;傅里叶级数解调模块将运动信号在三级时钟下解调得到同相分量和正交分量;通信模块工作在四级时钟下,把检测模态的同相分量输出到上位机;幅度相位提取模块工作在三级时钟下,对驱动模态的同相分量和正交分量进行数学运算求得幅度和相位,对其进行自动增益控制和锁相环控制得到幅度调整量和频率调整量;驱动力产生模块工作在三级时钟下,通过幅度调整量和频率调整量得到驱动力,通过数模转换器进入到模拟部分;载波产生模块工作在一级时钟下,控制载波频率为微机械谐振频率的整数倍,通过数模转换器进入到模拟部分。通过多级时钟管理,使不同数字信号处理模块工作在多级采样率下,降低数字动态功耗。通过傅里叶解调算法实现解调,相比乘法解调省略了低通滤波环节,消除滤波器引入的时间延迟和相位滞后,避免了滤波残余分量对解调结果的影响,且有更好的抗噪性能。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种多采样率的低功耗微机械陀螺数字信号处理方法
- 一种实现任意降采样率转换的数字信号处理方法