一种智能靠尺
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及靠尺领域,更具体地说,涉及一种智能靠尺。
背景技术
建筑墙面需要检测垂直度与平整度,地面需要检测平整度,这个检测常采用的工具为2米靠尺,尺子较长,折叠后也有1米长度,不方便携带。且测量时需要人工校尺,边测量边记录数据,正常需要2个人员完成协作,操作不方便且费时间,而且人为误差因素较大。
发明内容
本发明为解决现有技术处理的缺陷和不足,提供一种智能靠尺。
为实现上述目的,本发明采取的技术方案是一种智能靠尺,包括用于接收和传送图纸数据的第一处理器、用于校准所述智能靠尺的垂直度的第二处理器,所述智能靠尺包括位于一端的第一尺身、位于另一端的第六尺身、还包括位于中间段的包含复数个依次相互套接的尺身的可伸缩尺身,所述可伸缩尺身的两端分别可伸缩地套接在所述第一尺身、第六尺身上,所述第一处理器设置于所述第一尺身上,所述第二处理器设置于所述第六尺身上。
所述可伸缩尺身包括第二尺身、第五尺身,所述第二尺身可伸缩地套接在所述第一尺身上,所述第五尺身可伸缩地套接在所述第六尺身上。
所述可伸缩尺身还包括依次连接的第三尺身、第四尺身,所述第三尺身可伸缩地套接在所述第二尺身上,所述第四尺身可伸缩地套接在所述第五尺身上。
所述第三尺身、第四尺身外的上下两侧均设置有第一齿纹轨道,所述第一尺身、第六尺身内的上下两侧均设置有第二齿纹轨道,所述第二尺身、第五尺身的上下两侧均设置有第三齿纹轨道,所述第三齿纹轨道分别与所述第一齿纹轨道、第二齿纹轨道啮合。
所述第一齿纹轨道、第二齿纹轨道、第三齿纹轨道均为可滚动的履带式轨道。
所述第二尺身、第五尺身内设置有若干个第一伸缩齿和第一液压杆,所述第二尺身、第五尺身上设置有与所述第一伸缩齿相配合的第一通孔,所述第一液压杆与所述第一伸缩齿连接以控制所述第一伸缩齿的伸缩,所述第一伸缩齿可伸出所述第一通孔并且其长度与所述第一尺身、第六尺身的宽度相等。
所述第三尺身、第四尺身内设置有若干个第二伸缩齿和第二液压杆,所述第三尺身、第四尺身上设置有与所述第二伸缩齿相配合的第二通孔,所述第二液压杆与所述第二伸缩齿连接以控制所述第二伸缩齿的伸缩,所述第二伸缩齿可伸出所述第二通孔并且其长度与所述第一尺身、第六尺身的宽度相等。
所述第一伸缩齿的长度大于所述第二伸缩齿的长度。
所述第一尺身、第六尺身上均设置有一个靠脚,所述靠脚上设置有用于检测所述智能靠尺垂直度的红外线装置,所述红外线装置与所述第二处理器连接。
所述第一尺身上设置有用于显示测量数据的显示器和用于报读测量数据的扩音器,所述显示器、扩音器分别与所述第一处理器连接。
本发明的有益效果:
本发明提供了一种智能靠尺,解决了现有建筑质量检测现场工作效率低下问题以及携带问题,靠尺收缩折叠后最小化,人工记录与报读变成设备自动记录与报读,减少人为因素的干扰,提高测量的工作效率,并保证测量工作的精准性,同时还可保证测量的公正性与公开性,数据可以与图纸定位,保证数据与空间的定位匹配性,同时能批量导出,节省人员记录的时间与数据处理的时间。
附图说明
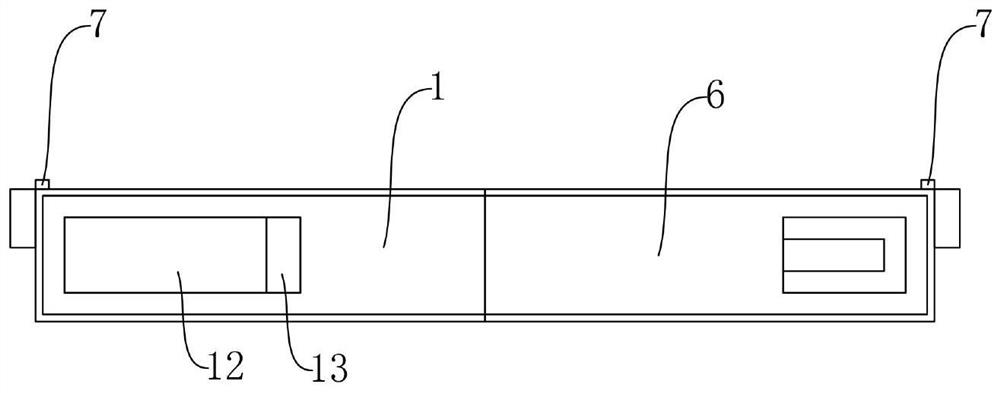
图1为本发明一种智能靠尺的收缩状态图;
图2为本发明一种智能靠尺的展开状态图;
图3为本发明一种智能靠尺的第一伸缩齿、第二伸缩齿展开状态图;
图4为本发明一种智能靠尺的第二齿轮轨道、第三齿轮轨道示意图。
具体实施方式
下面结合附图对本发明作进一步地详细的说明,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,本具体实施的方向以图1方向为标准。
如图1至图4所示,一种智能靠尺,包括用于接收和传送图纸数据的第一处理器11、用于校准智能靠尺的垂直度的第二处理器61,智能靠尺包括位于一端的第一尺身1、位于另一端的第六尺身6、还包括位于中间段的包含复数个依次相互套接的尺身的可伸缩尺身,可伸缩尺身的两端分别可伸缩地套接在第一尺身1、第六尺身6上,第一处理器11设置于第一尺身1上,第二处理器61设置于第六尺身6上。
如图2、图4所示,可伸缩尺身包括第二尺身2、第五尺身5,第二尺身2可伸缩地套接在第一尺身1上,第五尺身5可伸缩地套接在第六尺身6上。
可伸缩尺身还包括依次连接的第三尺身3、第四尺身4,第三尺身3可伸缩地套接在第二尺身2上,第四尺身4可伸缩地套接在第五尺身5上。
第三尺身3、第四尺身4外的上下两侧均设置有第一齿纹轨道34,第一尺身1、第六尺身6内的上下两侧均设置有第二齿纹轨道16,第二尺身2、第五尺身5的上下两侧均设置有第三齿纹轨道25,第三齿纹轨道25分别与第一齿纹轨道34、第二齿纹轨道16啮合。
第一齿纹轨道34、第二齿纹轨道16、第三齿纹轨道25均为可滚动的履带式轨道。
每个尺身上共有4个齿纹轨道,分别设置于尺身的上、下、左、右四条边上,防止尺身伸缩时移位与倾斜。将第一尺身1、第六尺身6分别往两侧拉动的时候,第二齿纹轨道16滚动,同时拉动与其啮合的第三齿纹轨道25滚动,第二尺身2、第五尺身5被第三齿纹轨道25推出,通过第三齿纹轨道25的传动使第一齿纹轨道34滚动,从而将第三尺身3、第四尺身4推出。
第一尺身1、第六尺身6可对折,第三尺身3、第四尺身4之间通过可对折的活页连接。
第二尺身2、第五尺身5内设置有若干个第一伸缩齿81和第一液压杆82,第二尺身2、第五尺身5上设置有与第一伸缩齿81相配合的第一通孔,第一液压杆82与第一伸缩齿81连接以控制第一伸缩齿81的伸缩,第一伸缩齿81可伸出第一通孔并且其长度与第一尺身1、第六尺身6的宽度相等。
第三尺身3、第四尺身4内设置有若干个第二伸缩齿91和第二液压杆92,第三尺身3、第四尺身4上设置有与第二伸缩齿91相配合的第二通孔,第二液压杆92与第二伸缩齿91连接以控制第二伸缩齿91的伸缩,第二伸缩齿91可伸出第二通孔并且其长度与第一尺身1、第六尺身6的宽度相等。
第一伸缩齿81的长度大于第二伸缩齿91的长度。
第一液压杆82、第二液压杆92上均设置有传感器,通过传感器与第一处理器11连接。
第一尺身1、第六尺身6上均设置有一个靠脚7,靠脚7上设置有用于检测智能靠尺垂直度的红外线装置,红外线装置与第二处理器61连接。
第一尺身1上设置有用于显示测量数据的显示器12和用于报读测量数据的扩音器13,显示器12、扩音器13分别与第一处理器11连接。显示器12是显示测量的数据(包含垂直度、平整度等),扩音器13是对显示器12呈现的数据进行报读。显示器12上有用于展开第一伸缩齿81、第二伸缩齿91的按钮,触碰按钮,第一处理器11发送信号到第一液压杆82、第二液压杆92上的传感器,传感器接收到展开信号后,第一液压杆82、第二液压杆92分别推动第一伸缩齿81、第二伸缩齿91展开(如图3所示)。
第二处理器61主要是检测靠脚的红外线装置与尺身是否一致,当后期伸出的第一伸缩齿81、第二伸缩齿91的高度不在同一条线上时就报警,报告异常,是靠尺自我检测和校尺的一个装置。第一处理器11、第二处理器61上均设置有为其供电的电源。
在开始检测之前,通过手机APP或电脑端上传CAD图纸到第一处理器11,第一处理器11记录CAD图纸数据与方位,测量时根据图纸选择房间与实际检测位置。靠尺完全处于工作状态,尺身通过自身两端的红外线控制校尺,保证尺身精准度。靠尺通过人员测量墙面的垂直度,测量垂直度采用有靠尺靠脚的一面进行测量检测,测得数据直接显示在显示器12上,并通过扩音器13报读出来,让周围参与检测和随行的人员都能听到实际测得的数据,保证测量的公平性与公开性。测量平面平整度时,采用靠尺有靠尺靠脚的背面进行检测,数据记录、显示、报读与垂直度检测一样。所有测得数据会根据图纸定位进行精准记录,检测完毕之后可以根据楼栋及房间信息进行批量导出。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
- 一种智能教学尺以及基于智能教学尺的教学管理系统
- 印刷电路尺带、印刷电路尺带智能卷尺及数据读取方法