一种基于计算机图像处理的裂缝识别优化方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种深度学习模型裂缝初识别结果优化方法,属于图像识别技术领域。
背景技术
裂缝影响结构构件的承载力和耐久性,其检测在结构物的安全评估中占据重要位置。目前,裂缝数据的采集常常采用人工检测手段。人工检测速度慢、难度大、花费巨大劳动力,随着对检测精度的要求不断提高,其精度已经难以满足。同时,建筑结构高度和跨度的增加与形式的复杂,均给人工检测带来更大的难度,已经不能满足日常检测的需要,人工检测的劣势越来越明显。传统的人工检测手段已经无法满足未来庞大的检测任务;
近年来计算机图像处理技术在结构损伤识别领域中应用广泛,通过形态学的方法能准确地提取裂缝轮廓,但受原图像噪声的影响较大;基于深度学习网络的裂缝监测系统,能准确地定位裂缝位置,但无法精确地分割开背景与真实裂缝,无法获得准确的裂缝轮廓,真实裂缝和深度学习识别裂缝的外轮廓存在明显差异。
发明内容
为了克服现有技术的不足,本发明公开了一种基于计算机图像处理的裂缝识别优化方法,对裂缝进行了准确的定位与分割,包括利用深度学习方法对图片中的裂缝进行初步识别;
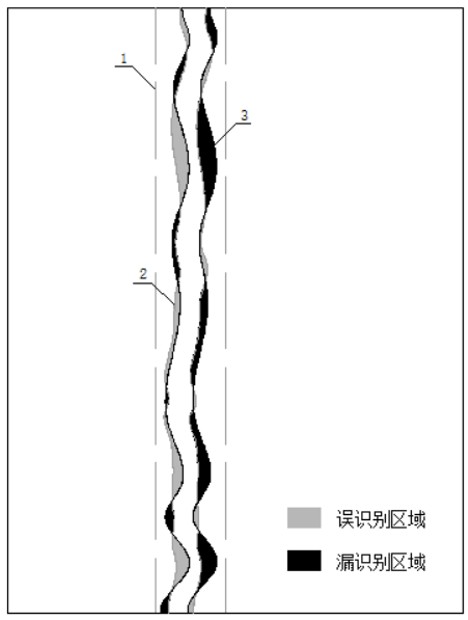
本发明将深度学习网络识别结果掩膜轮廓与真实裂缝轮廓的误差分为两类:一类是真实裂缝不包含、而深度学习识别结果包含的区域,称之为误识别区域;另一类是真实裂缝包含、而深度学习识别结果不包含的区域,称之为漏识别区域。因此可将掩膜区域划分为三部分:识别准确区域、误识别区域、漏识别区域;
本发明将裂缝区域与背景区域的RGB三通道颜色分量平均值进行比较,对裂缝图像识别结果进行进一步优化,从而获得更加精确的裂缝掩膜坐标;
一种基于计算机图像处理的裂缝识别优化方法,其技术方案为:
步骤1:拍摄上万张裂缝图片并剪裁成相同尺寸。采用标注软件,使用首尾相连的多段线拟合裂缝轮廓,作为深度学习模型的训练数据集;
步骤2:利用步骤1中的数据集对Mask R-CNN深度学习模型进行训练,得到训练权重。利用训练后的Mask R-CNN深度学习模型对裂缝图像进行初步定位与识别,初步识别后输出的结果为裂缝位置的识别框和裂缝覆盖区域掩膜,识别框框选出了裂缝所在位置的矩形区域,掩膜覆盖了裂缝的大致完整区域;
步骤3:利用图像处理技术对步骤2中的识别结果进行再优化处理。将步骤2中所述识别矩形框内所有像素点分为裂缝区域(掩膜内)像素点、背景区域(掩膜外)像素点两部分;计算裂缝区域(掩膜内)像素点、背景区域(掩膜外)像素点两部分像素点的RGB分量平均值。遍历掩膜区域内所有像素点,计算各像素点RGB三通道颜色分量与裂缝区域像素点平均RGB值、背景区域像素点平均RGB值的欧式距离,将该像素点并入距离较小的区域像素点内,剔除误识别点、加入漏识别点以获得新的掩膜区域;
重复步骤3,获得更加精确的裂缝掩膜坐标。当某一次迭代后的裂缝掩膜坐标集与迭代前一次裂缝掩膜坐标集一致,算法收敛获得最优解,可得到最终的裂缝掩膜坐标;
本发明的有益效果是:由于裂缝具有宽度较小、不易标注的特点,裂缝监测对于裂缝轮廓的精度要求较高。而现有的基于深度学习网络的裂缝识别方法无法准确分割开真实裂缝和背景,难以获得精确的裂缝坐标。利用计算机图像处理的方法,对深度学习初步识别结果进行优化。得到深度学习Mask R-CNN网络初始别结果后,首先计算裂缝区域(掩膜内)像素点、背景区域(掩膜外)像素点两部分像素点的RGB分量平均值。然后遍历掩膜区域内所有像素点,计算各像素点RGB三通道颜色分量与裂缝区域像素点平均RGB值、背景区域像素点平均RGB值的欧式距离,将该像素点并入距离较小的区域像素点内,剔除误识别点、加入漏识别点以获得新的掩膜区域。最后迭代至收敛,便可得到精确的裂缝掩膜坐标。本发明利用计算机图像处理技术,对深度学习网络的初识别结果进行优化,可实现背景与真实裂缝的精确分割。
附图说明
图1是真实裂缝与深度学习初识别裂缝的外轮廓误差示意图;
图2是Mask R-CNN深度学习模型初步识别结果示意图;
图3是真实裂缝与优化后掩膜轮廓效果对比图。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本申请所附权利要求所限定的范围;
步骤一:拍摄上万张裂缝图片并剪裁成相同尺寸。采用标注软件,使用首尾相连的多段线拟合裂缝轮廓,作为Mask R-CNN深度学习模型的训练数据集;利用数据集对Mask R-CNN 深度学习模型进行训练,得到训练权重;
步骤二:利用训练后的Mask R-CNN深度学习模型对裂缝图像进行初步定位与识别,初步识别结果为深度学习识别定位框1、深度学习识别掩膜轮廓2和真实裂缝轮廓3,如图1所示;
步骤三:深度学习识别定位框内所有的像素点分为裂缝区域(掩膜内)像素点、背景区域 (掩膜外)像素点两部分,遍历掩膜区域内所有像素点,计算各像素点RGB三通道颜色分量与裂缝区域像素点平均RGB值的欧式距离,裂缝区域像素点RGB分量平均值计算公式为:
其中,
步骤四:计算各像素点RGB三通道颜色分量与背景区域像素点平均RGB值的欧式距离,背景区域像素点RGB三通道颜色分量平均值计算公式为:
其中,
R
步骤五:遍历掩膜区域所有像素点,计算各像素点RGB三通道颜色分量与裂缝区域像素点平均RGB值、背景区域像素点平均RGB值的欧式距离,欧式距离的计算公式如下:
其中,D
步骤六:剔除误识别点与加入漏识别点:比较D
将掩膜像素点按边界向外膨胀一个像素点宽度,获得的新增像素点作为候选像素点,同样计算出D
步骤七:根据新得到的掩膜区域,重新计算裂缝区域像素点平均RGB值
步骤八:重复步骤三至步骤七,当某一次迭代后掩膜坐标集与迭代前一致,停止迭代,得到最终的裂缝掩膜轮廓,优化效果如图3所示;
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求;
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于计算机图像处理的裂缝识别优化方法
- 一种基于智能识别技术的计算机图像处理设备及其方法