一种垂线坐标仪现场校准装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及垂线坐标仪技术领域,特别是涉及一种垂线坐标仪现场校准装置。
背景技术
垂线坐标仪是一种测量工程结构物水平位移的垂线测量装置中的测量仪器,一般用于大坝、桥梁、高层建筑及核电 站安全壳的变形测量,垂线坐标仪作为量器具,除了在出厂时需要校准外,在使用后,也需要定期进行校准,才能保证垂线坐标仪采集数据的准确性。
垂线坐标仪作为在线监测设备,安装后尽量避免拆卸以保证连续监测过程不被干扰或中断,因此有必要提供一种现场在线式校准装置与校准方法。
发明内容
针对上述情况,为克服现有技术之缺陷,本发明提出了一种不干扰垂线坐标仪的现场快速校准装置,通过上位机的校准程序精密控制步进测量装置自带悬垂张拉线,记录垂线坐标仪输出值,同步输入到校准装置上位机进行整理运算,校准程序完成后,校准装置上位机自动输出垂线坐标仪的非线性度以及综合误差。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种垂线坐标仪现场校准装置,包括机械组件、电子组件;
所述机械组件包括装载平台,所述装载平台的顶部安装有X轴主动块,所述X轴主动块的顶部安装有第一移动滑块,所述第一移动滑块滑动连接于X轴主动块,所述第一移动滑块的顶部安装有Y轴次动块,所述Y轴次动块的一侧安装有第二移动滑块;
所述第二移动滑块的底部悬挂有悬垂线,所述悬垂线的底部设有稳固活动装置,所述稳固活动装置包括X轴随动块,所述X轴随动块的底部安装有随动轨道,所述X轴随动块滑动连接于随动轨道,所述X轴随动块与X轴主动块之间设有立柱,所述X轴主动块、X轴从动块受立柱作用保持同步运动;
所述电子组件包括计算机,所述计算机作为控制终端。
进一步地,所述X轴主动块为滚珠丝杆与光栅尺的组合件,且所述Y轴次动块同样为滚珠丝杆与光栅尺的组合件,所述光栅尺安装于滚珠丝杆上。
进一步地,所述第二移动滑块的底部设有Y轴随动结构,所述Y轴随动结构为滑轨阻尼器,所述悬垂线的底端自上而下穿过滑轨阻尼器,且所述滑轨阻尼器安装于立柱底端两侧。
进一步地,所述电子组件还包括脉冲采集模块、伺服驱动器、伺服电机,所述光栅尺与计算机之间通过脉冲采集模块进行连接,所述滚珠丝杆与计算机之间通过伺服驱动器、伺服电机实现精确控制。
进一步地,所述装载平台的一侧固定安装有夹紧装置,所述夹紧装置包括夹紧块、紧顶螺栓,所述X轴主动块的两侧固定连接有固定块,所述夹紧块覆盖于固定块表面,所述紧顶螺栓安装于夹紧块顶部,底部嵌入至固定块的孔槽中。
综上所述,本发明具有以下有益效果:
本发明对于已安装现场的垂线坐标仪,不需要拆卸,即可实现现场标定;
本发明通过滑轨阻尼器,减少移动垂线后的稳定时间,提高了标定效率;
本发明根据输入标定参数,程序自动执行两个坐标轴的标定动作与报告输出,实现了自动化标定过程,有效提高了现场标定效率。
附图说明
此处所说明的附图是用来提供对本发明的进一步理解,构成本申请的一部分,但并不构成对本发明的不当限定,在附图中:
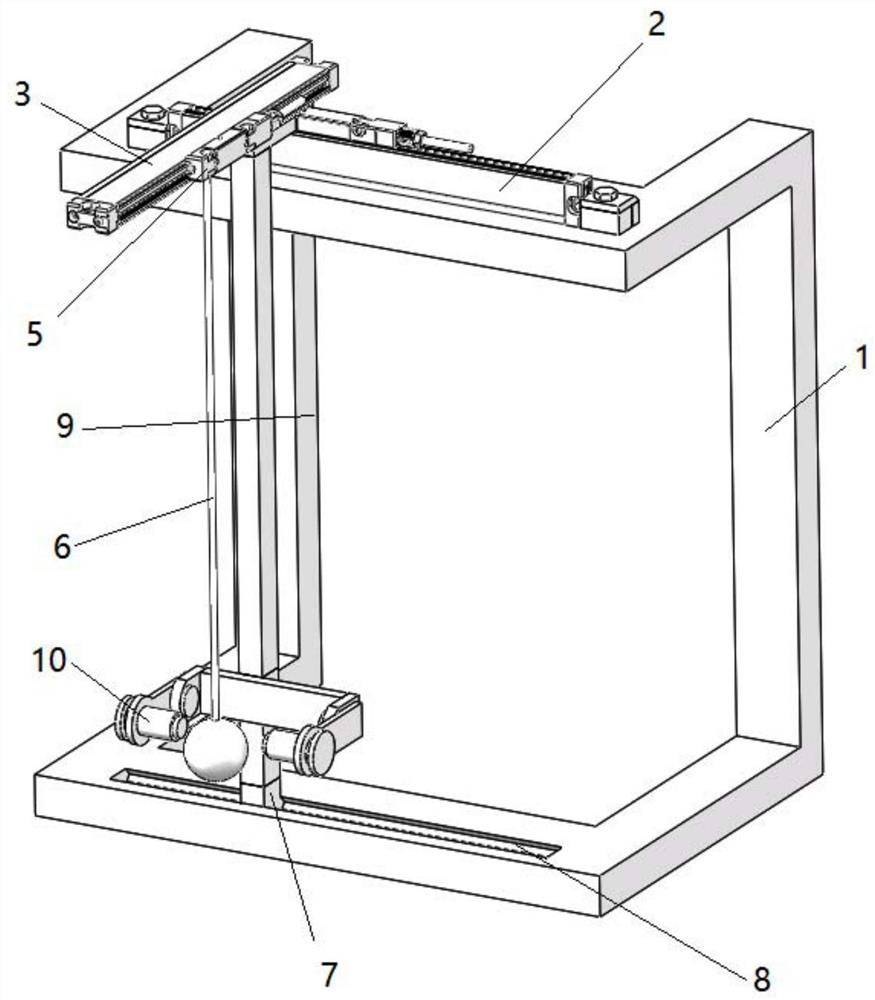
图1是本发明的结构示意图;
图2是本发明顶部的具体结构示意图;
图3是本发明中电子组件的连接示意图;
图4是本发明中校准过程的步骤图;
图5是本发明的校准时序图。
图中,1、装载平台;2、X轴主动块;3、Y轴次动块;4、第一移动滑块;5、第二移动滑块;6、悬垂线;7、X轴随动块;8、随动轨道;9、立柱;10、Y轴随动结构;11、脉冲采集模块;12、伺服驱动器;13、伺服电机;14、夹紧块;15、紧顶螺栓;16、固定块。
具体实施方式
有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图1至附图5对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
下面将参照附图描述本发明的各示例性的实施例。
实施例1:如图1至图5所示,一种垂线坐标仪现场校准装置,包括机械组件、电子组件两大部分。
机械组件包括装载平台1,装载平台1的顶部安装有X轴主动块2,X轴主动块2的顶部安装有第一移动滑块4,第一移动滑块4滑动连接于X轴主动块2,第一移动滑块4的顶部安装有Y轴次动块3,Y轴次动块3的一侧安装有第二移动滑块5,X轴主动块2与Y轴次动块3整体形成X、Y轴两个轴方向的移动方式。
X轴主动块2为滚珠丝杆与光栅尺的组合件,且Y轴次动块3同样为滚珠丝杆与光栅尺的组合件,光栅尺安装于滚珠丝杆上,第一移动滑块4与第二移动滑块5分别安装在对应的光栅尺一侧,跟随光栅尺做同步运动。
第二移动滑块5的底部悬挂有悬垂线6,悬垂线6的底部设有稳固活动装置,稳固活动装置包括X轴随动块7,X轴随动块7的底部安装有随动轨道8,X轴随动块7滑动连接于随动轨道8,X轴随动块7与X轴主动块2之间设有立柱9,X轴主动块2、X轴从动块受立柱9作用保持同步运动,从而保证了悬垂线6的悬垂度。
第二移动滑块5的底部设有Y轴随动结构10,Y轴随动结构10为滑轨阻尼器,悬垂线6的底端自上而下穿过滑轨阻尼器,且滑轨阻尼器安装于立柱9底端,阻滑轨阻尼器的安装能够大大提升悬垂线6在Y轴方向做运动时的稳定性,减缓悬垂线6底部的振动幅度,使其尽快趋于平稳。
装载平台1的一侧固定安装有夹紧装置,夹紧装置包括夹紧块14、紧顶螺栓15,X轴主动块2的两侧固定连接有固定块16,夹紧块14覆盖于固定块16表面,紧顶螺栓15安装于夹紧块14顶部,底部嵌入至固定块16的孔槽中,夹紧块14的L型开槽能够便于X轴主动块2的定位安装,同时能够保证夹紧固定效果。
电子组件包括计算机、脉冲采集模块11、伺服驱动器12、伺服电机13,计算机作为控制终端,光栅尺与计算机之间通过脉冲采集模块11进行连接,滚珠丝杆与计算机之间通过伺服驱动器12、伺服电机13实现精确控制。
计算机通过调节伺服驱动器12进而控制伺服电机13工作,带动滚珠丝杠的滑块移动到指定位置,与此同时,光栅尺采集位置数据传送给计算机,计算机记录移动位移。
在本发明的实施方式中,现有垂线坐标仪的量程为50mm*50mm,精度为0.1mm,已安装于工程现场,为保证工程现场监测数据的连续性,尽可能减少对现场垂线坐标仪的干扰,需采用现场校准标定。
由于垂线坐标仪量程为50mm*50mm,X轴主动块2和Y轴次动块3选择行程为100mm的T型滚珠丝杆,夹紧固定装置用于将标定装置与待测的已安装的垂线坐标仪进行固定连接,装载平台1与夹紧固定装置锁紧在一起,作为其它运动结构的承载平台。
第一移动滑块4用于带动悬垂线6沿着X轴移动,第二移动滑块5用于带动悬垂线6沿着Y轴移动,立柱9固定于第一移动滑块4上,带动底端X轴随动块7沿着X轴同步移动,保证悬垂线的悬垂度。
X轴主动块2及Y轴次动块3均为滚珠丝杆加光栅尺的组合件,并选择100mm行程5um精度的TTL信号输出的光栅尺,计算机通过控制伺服驱动器12进而控制伺服电机13,带动滚珠丝杠的滑块移动到指定位置,同时,光栅尺采集位置数据经过高速脉冲采集模块11传送给计算机,计算机记录移动位移。
在校准过程中,计算机根据待标定的垂线坐标仪的量程与精度,运行自动标定软件,控制X轴主动块2或Y轴次动块3前后移动,带动悬垂线6在待测坐标仪过孔内移动,待测坐标仪测得X轴和Y轴位置数据。
在校准过程中,每次标定是固定一个坐标轴,使垂线在另一个坐标轴方向上移动,同时记录每次光栅尺测得的数据以及待测坐标仪测得的两个轴向的数据。
每个步进完成后,计算机自动采集了该步进后光栅尺的读数,软件界面需要人工录入垂线坐标仪两个轴向的测读数据,系统方能执行下一步步进动作。
每次步进的位移缺省设置为量程/10,保证一个行程可以步进9次,每个轴向校准需往返3次,记录6*9=54组数据,每组数据包含待测坐标仪测量数据以及光栅尺测量数据,最后,计算机软件自动分析数据情况,输出校准报告。
以上所述是结合具体实施方式对本发明所作的进一步详细说明,不能认定本发明具体实施仅局限于此;对于本发明所属及相关技术领域的技术人员来说,在基于本发明技术方案思路前提下,所作的拓展以及操作方法、数据的替换,都应当落在本发明保护范围之内。
- 一种垂线坐标仪现场校准装置
- 一种垂线坐标仪的现场标定装置