用于斜拉索检测机器人上的平衡夹紧避震装置
文献发布时间:2023-06-19 11:27:38
技术领域
本发明属于爬索机械设备设施技术领域,具体涉及一种用于斜拉索检测机器人上的平衡夹紧避震装置。
背景技术
斜拉索是把斜拉桥主梁及桥面重量直接传递到塔架上的主要承重部材。斜拉桥的拉索材料通常为钢索,钢索外套设有PE护套,斜拉索检测机器人是能沿着斜拉索自动上爬,通过机器人装载的摄像头来查看斜拉索PE护套的外观情况的自动化设备,近些年来,随着各地兴建的斜拉桥的数量日益增加,对斜拉索的检测也越发重要。
现有的斜拉索检测机器人的避震装置是通过弹簧连接活动底座和轮子支架,采用三边夹紧的方式使机器人夹紧在拉索上,通过电机驱动轮子爬升或下降,在运行过程中,当轮子碾过拉索的缠绕风雨线过其它小障碍时,避震装置会自动调节轮子伸缩,从而在保证轮子和拉索之间摩檫力的同时不损害风雨线以及减轻轮子磨损。
但是,现有技术在实际的应用过程中存在如下的技术问题:
由于避震装置的弹簧受力是垂直于拉索表面,限制了机器人的夹紧方式,三边夹紧的方式虽然能牢固夹紧,但是需要用六根电动推杆形成三角形,机器的整体外形会显得很大且笨重,对日常运输和实际使用都有影响;
电机和轮子装在机器最内部,由于机器人体形较大,且重心落在机器人的中心即轮子位置,因此当检测索径较小的拉索时,机器人加速或减速的过程中,单侧轮子端即便有避震装置,也会对拉索产生较大的应力,可能会对拉索表面造成损伤;
同样是因为机器人结构问题,在使机器人体形尽可能小的同时,机器人可检测的最大索径也会变小。
基于现有技术存在的上述技术问题,本发明提出一种用于斜拉索检测机器人上的平衡夹紧避震装置。
发明内容
本发明提供一种用于斜拉索检测机器人上的平衡夹紧避震装置。
为达到上述目的,本发明采用以下技术方案:
一种用于斜拉索检测机器人上的平衡夹紧避震装置,包括机器人框架和设在所述机器人框架上的两个行走单元,两个所述行走单元相对的夹持在拉索上,所述行走单元包括:
第一力臂支架,能够转动的设置在所述机器人框架的上端,所述第一力臂支架上设有滚轮,所述滚轮抵接于拉索,所述滚轮通过伺服电机驱动;
第二力臂支架,能够转动的设置在所述机器人框架的下端,所述第二力臂支架上设有所述滚轮,所述滚轮抵接于拉索;
铰链装置,所述铰链装置的一端铰接在所述第一力臂支架上,所述铰链装置的另一端铰接在所述第二力臂支架上;
电动推杆,所述电动推杆的一端铰接在所述第一力臂支架上,所述电动推杆的另一端铰接在所述第二力臂支架上。
进一步地,所述第一力臂支架和/或所述第二力臂支架为“L”形结构。
进一步地,所述铰链装置为铰链组,所述铰链组的中间轴固定设置在所述机器人框架上,所述铰链组的上端铰接于所述第一力臂支架,所述铰链组的下端铰接于所述第二力臂支架。
进一步地,所述铰链组的外侧设有铰链组滑槽,所述铰链组滑槽固定设置在所述机器人框架上。
进一步地,所述电动推杆包括底座、固定设置在所述底座上的缸筒、能够伸缩的设置在所述缸筒中的推杆、固定设置在所述推杆顶端的弹簧和固定设置在所述弹簧顶端的铰接块,所述铰接块连接于所述第一力臂支架。
进一步地,所述第一力臂支架包括第一支架单元、第二支架单元和固定设置在所述第一支架单元和所述第二支架单元之间的连接杆,所述第一支架单元和所述第二支架单元均为“L”形结构,所述第一支架单元和所述第二支架单元上均设有滚轮单元。
进一步地,所述机器人框架上设有用于摄取拉索图像或视频资料的摄像机。
进一步地,所述机器人框架上设有速度报警器,所述速度报警器连接于机器人控制器,所述速度报警器的报警阈值根据溜索的下落速度确定。
进一步地,所述机器人控制器连接于上位机,以向所述上位机发送控制信息和摄像机传送的视频信息。
进一步地,所述机器人框架由6面相互连接的框板组成,构成正六边形的机器人框架,所述两个行走单元分别固定设置在相对的两面所述框板上。
进一步地,所述滚轮上设有压力传感器,所述压力传感器连接于所述机器人控制器以发送所述滚轮压在所述拉索上的压力。
进一步地,所述机器人控制器采用单片机。
与现有技术相比,本发明的优越效果在于:
1、本发明所述的用于斜拉索检测机器人上的平衡夹紧避震装置,通过第一力臂支架、第二力臂支架、电动推杆的配合设置,简化了所述避震装置的组成配件,使结构紧凑;
2、本发明所述的用于斜拉索检测机器人上的平衡夹紧避震装置,通过铰链装置和电动推杆的配合设置,使第一力臂支架和第二力臂支架能够同步运动,使滚轮同步施加或减轻压力,对拉索的夹紧效果更优;
3、本发明所述的用于斜拉索检测机器人上的平衡夹紧避震装置,通过设置第一力臂支架和第二力臂支架为L型结构,以向内旋转压紧,使得机器人内部空间变大,可检测的索径变化范围加大。
附图说明
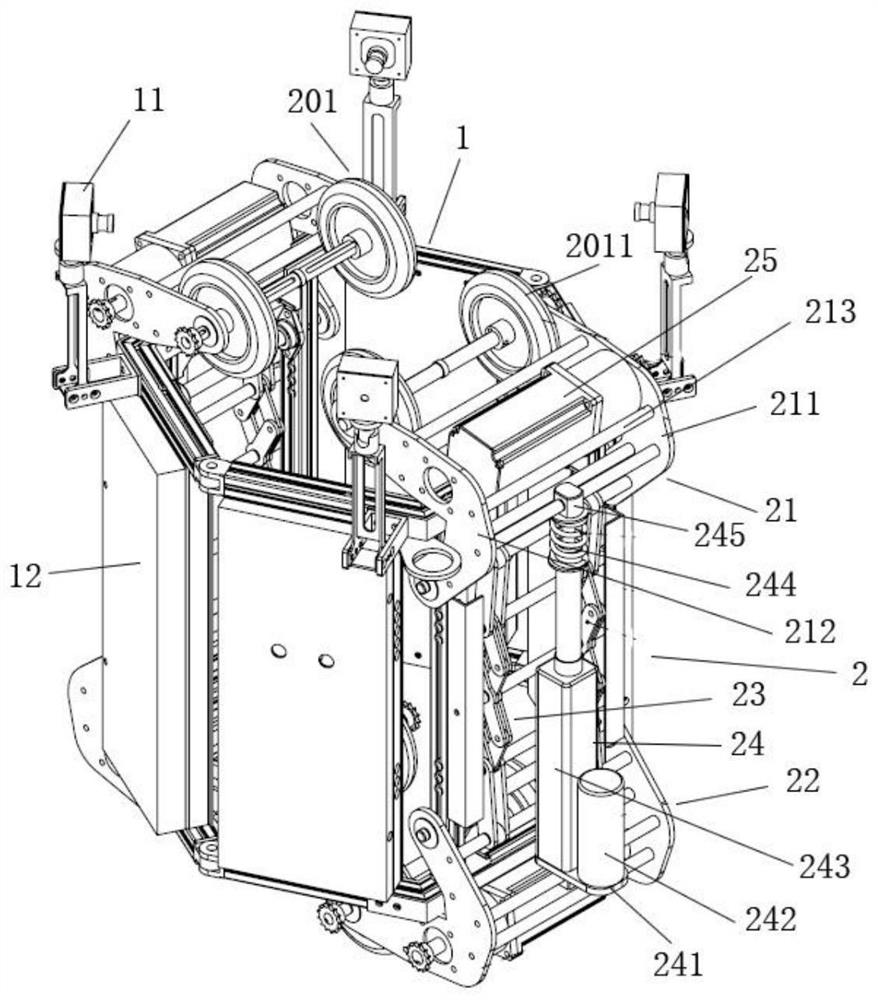
图1是本发明实施例中所述用于斜拉索检测机器人上的平衡夹紧避震装置一个角度的结构示意图;
图2是本发明实施例中所述用于斜拉索检测机器人上的平衡夹紧避震装置另一个角度的结构示意图;
图3是本发明实施例中所述行走单元的结构示意图。
图中,1-机器人框架、11-摄像机、12-框板、2-行走单元、201-滚轮、2011-滚轮单元、21-第一力臂支架、211-第一支架单元、212-第二支架单元、213-连接杆、22-第二力臂支架、23-铰链装置、24-电动推杆、241-底座、242-缸筒、243-推杆、244-弹簧、245-铰接块、25-伺服电机。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
实施例
如图1-3所示,所述用于斜拉索检测机器人上的平衡夹紧避震装置,包括机器人框架1和设在所述机器人框架1上的两个行走单元2,两个所述行走单元2相对的夹持在拉索上,所述行走单元2包括:
第一力臂支架21,能够转动的设置在所述机器人框架1的上端,所述第一力臂支架21上设有滚轮201,所述滚轮201抵接于拉索,所述滚轮211通过伺服电机25驱动;
第二力臂支架22,能够转动的设置在所述机器人框架1的下端,所述第二力臂支架22上设有所述滚轮201,所述滚轮201抵接于拉索;
铰链装置23,所述铰链装置23的一端铰接在所述第一力臂支架21上,所述铰链装置23的另一端铰接在所述第二力臂支架22上;
电动推杆24,所述电动推杆24的一端铰接在所述第一力臂支架21上,所述电动推杆24的另一端铰接在所述第二力臂支架22上。
在上述实施例中,所述滚轮201采用铝芯橡胶轮以减轻重量并有良好的滤振效果;
通过所述电机驱动所述滚轮201实现上升和下降;
通过所述第一力臂支架21和/或所述第二力臂支架22的角度转变,调整所述滚轮201压在所述拉索上的力;
通过所述电动推杆24的伸缩,实现所述第一力臂支架21和所述第二力臂支架22的角度调整,进而调整滚轮201压在所述拉索上的力。
在实际的工作过程中,在所述机器人框架1上设置4台摄像机11,分别采集拉索的不同部位的视频和图像信息,检测人员通过远程观看摄像机11传送的视频信息能够实时了解拉索的状况,当出现故障(例如,所述机器人框架在所述拉索上快速滑落,即发生溜索),通过控制所述第一力臂支架21和所述第二力臂支架22的角度,加大所述滚轮201压在所述拉索上的力,实现所述滚轮201转动速度的降低,以制止溜索;
作为上述实施例的改进,所述机器人框架1上设有速度报警器,所述速度报警器连接于机器人控制器,所述速度报警器的报警阈值根据溜索的下落速度确定。
所述机器人控制器连接于所述伺服电机25和所述电动推杆24以对所述伺服电机25和所述电动推杆24进行控制;
所述机器人控制器采用单片机。
所述机器人控制器连接于上位机,以向所述上位机发送控制信息和摄像机11传送的视频信息。
所述机器人框架1由6面相互连接的框板12组成,构成正六边形的机器人框架1,所述两个行走单元2分别固定设置在相对的两面所述框板12上,实际应用时,打开两相邻的所述框板12,将所述机器人框架1套在所述拉索上,再将两相邻的所述框板12固定连接于一体,其中,能够打开的两相邻的所述框板12通过梅花胶柄螺丝进行固定,其他相邻的所述框板通过十字螺丝进行固定。
在上述实施例中,所述滚轮201上设有压力传感器,所述压力传感器连接于所述机器人控制器以发送所述滚轮201压在所述拉索上的压力。
所述第一力臂支架21和/或所述第二力臂支架22为“L”形结构。
在上述实施例中,L型结构向内旋转压紧,使得机器人内部空间变大,可检测的索径变化范围加大。
所述铰链装置23为铰链组,所述铰链组的中间轴固定设置在所述机器人框架上,所述铰链组的上端铰接于所述第一力臂支架21,所述铰链组的下端铰接于所述第二力臂支架22。
在上述实施例中,所述铰链组的中间轴固定,使所述铰链组的上端和下端同步压缩或拉伸,进而,所述第一力臂支架21和所述第二力臂支架22以相同的角度转动,使所述滚轮201压在所述拉索上的力均匀。
所述铰链组的外侧设有铰链组滑槽,所述铰链组滑槽固定设置在所述机器人框架1上。
在上述实施例中,通过所述铰链组滑槽,使铰链组的移动限定在铰链组滑槽中,利于铰链组的两端伸缩的幅度一致。
所述电动推杆24包括底座241、固定设置在所述底座241上的缸筒242、能够伸缩的设置在所述缸筒242中的推杆243、固定设置在所述推杆243顶端的弹簧244和固定设置在所述弹簧顶端244的铰接块245,所述铰接块245连接于所述第一力臂支架21。
所述第一力臂支架21包括第一支架单元211、第二支架单元212和固定设置在所述第一支架单元211和所述第二支架单元212之间的连接杆213,所述第一支架单元211和所述第二支架单元212均为“L”形结构,所述第一支架单元211和所述第二支架单元212上均设有滚轮单元2011。
所述第二力臂支架22的结构与所述第一力臂支架21的结构相同。
本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书界定。
- 用于斜拉索检测机器人上的平衡夹紧避震装置
- 用于斜拉索检测机器人上的平衡夹紧避震装置