一种低轨卫星的地面跟踪装置和方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及卫星跟踪装置,具体涉及一种低轨卫星的地面跟踪装置和方法。
背景技术
低轨卫星移动通信系统由卫星星座、地面段、用户终端组成,通过多个卫星组成的通讯系统可以实现真正的低时延、全球覆盖、随遇接入。其中建立稳定的卫星-地面段、卫星-用户终端的通信链路是研究的重点方向。而研制高度集成化、小型化、稳定跟踪的地面接收设备、用户接收设备具有巨大的市场前景。低轨卫星轨道高度约400-2000km,不同于同步卫星,其围绕地球做高速运动,每天经过地面站上空约11~16次(与轨道长半轴有关),每次持续约十几分钟,地面站天线需要实时指向过境卫星才能建立稳定的通信连接,因此在程序跟踪模式下,需要计算卫星过境时地面站天线的方位俯仰角度,指导天线跟踪。由于卫星跟踪多采用S频段跟踪,或地面站天线带有单脉冲跟踪,对天线指向精度要求不高,且目前国内地面站天线方位俯仰角度计算方法没有公开,对精度也没有统一要求,各家精度参差不齐,一般误差在10
发明内容
本发明所要解决的技术问题是现有的低轨卫星天线跟踪精度不高,不能有效切换跟踪目标和多目标同时跟踪,目的在于提供一种低轨卫星的地面跟踪装置和方法,提高天线跟踪低轨卫星的精度,且实现同时跟踪多颗低轨卫星和自动切换最优通信链路。
本发明通过下述技术方案实现:
一种低轨卫星的地面跟踪装置,包括:
跟踪控制单元,用于计算低轨卫星对应的地面站天线方位角和俯仰角;
相位编码单元,用于将所述地面站天线方位角和俯仰角转换为天线阵元相移值;
地面站天线单元,用于根据所述天线阵元相移值调整相位,跟踪接收低轨卫星信号。
进一步地,所述地面站天线单元包括若干个相控天线阵元和若干个T/R组件,其中,多个相控天线阵元公用一个T/R组件,每个T/R组件跟踪接收一颗低轨卫星信号。
进一步地,还包括基带处理单元,用于根据所述低轨卫星信号进行采样量化得到跟踪信号质量量化值。
进一步地,所述跟踪控制单元根据所述跟踪信号质量量化值选取最优跟踪质量通道作为通信链路通道,根据所述通信链路通道控制基带处理单元进行业务数据信号处理和发送。
进一步地,所述基带处理单元根据跟踪信号质量量化值选取最优跟踪质量通道建立通信链路,并将选取的最优跟踪质量通道发送给所述跟踪控制单元,
所述跟踪控制单元根据所述最优跟踪质量通道控制基带处理单元进行业务数据信号处理和发送。
另外,对于上述低轨卫星地面跟踪装置,提出一种低轨卫星的地面跟踪方法,包括以下步骤:
步骤S1、获取多颗低轨卫星的ECEF坐标和地面站天线所在经纬度和海拔高度;
步骤S2、将地面站天线所在线经纬度和海拔高度转换为ECEF坐标,得到地面站天线的 ECEF坐标;
步骤S3、以地面站天线为参考点,将ECEF坐标系进行旋转平移变换,得到以地面站天线为原点,正北为X轴的参考坐标系;
步骤S4、根据所述参考坐标系,将所述低轨卫星的ECEF坐标转换为参考坐标;
步骤S5、根据所述参考坐标计算地面站天线的方位角和俯仰角;
步骤S6、将所述方位角和俯仰角传递给相位编码单元进行计算,得到阵元的相移值,相位编码单元将所述相移值传递给地面站天线单元;
步骤S7、地面站天线单元根据所述相移值调整相控天线阵元的相位并控制T/R组件跟踪接收对应低轨卫星的信号。
进一步地,步骤S2的具体过程为:
将地面站天线所在的经纬度转换为ECEF坐标系下的坐标(x,y,z),得到地面站天线在ECEF坐标系下的空间位置,具体过程为:
x=(N+H)cos(B)cos(L)
y=(N+H)cos(B)sin(L)
z=(N-Ne
其中,L表示经度,东经为正值,西经为负值;B表示纬度,北纬为正值,南纬为负值,H表示地面站天线所在的海拔高度;N表示修正半径,
进一步地,步骤S3中旋转平移转换的具体过程为:
步骤S31、以地心为原点旋转,分别绕Z轴旋转L度,Y轴旋转B'度,再绕Z轴旋转 180度,得到以地心为原点、Z轴沿着地心和地面站天线连线方向和X轴指向正北的地心坐标系,所述地心坐标系为:
其中,(E
步骤S32、根据所述地心坐标系,将地面站天线的ECEF坐标和低轨卫星的ECEF坐标转换为地心坐标系下的地心坐标,得到低轨卫星的地心坐标为(x1,y1,z1),地面站天线的地心坐标为(x2,y2,z2);
步骤S33、将所述地心坐标系分别沿X轴、Y轴、Z轴平移x2、y2、z2距离,得到以地面站天线为坐标原点,XOY平面为地面站天线所在的水平面,x轴指向正北、Y轴指向正西和Z轴垂直于XOY平面的参考坐标系;
步骤S34、根据所述参考坐标系,得到低轨卫星的参考坐标:
(x1′,y1′,z1′)表示低轨卫星在参考坐标系下的参考坐标。
进一步地,步骤S5计算方位俯仰角的具体过程为:
根据低轨卫星的参考坐标计算地面站天线的方位角和俯仰角,将地面站天线的方位角和俯仰角分别转换为平面夹角,则得到的地面站天线方位角和俯仰角为:
其中,Az表示地面站天线方位角,Az以正北为0度且顺时针方向为正;El表示地面站天线俯仰角,即地面站天线与大地水平面的夹角。
低轨卫星每天经过地面站上空的时间约为11~16次(与轨道长半轴有关),每次持续约十几分钟,地面站中的天线需要实时指向过境卫星才能建立稳定的通信连接,因此在程序跟踪模式下,需要计算卫星过境时地面站天线的方位角和俯仰角度,使用方位角和俯仰角指导天线跟踪。由于卫星跟踪多采用S频段跟踪,或地面监测站天线带有单脉冲跟踪,对天线指向精度要求不高,目前国内对地面天线的跟踪精度没有统一要求,一般误差在10
本发明与现有技术相比,具有如下的优点和有益效果:
本发明一种低轨卫星的地面跟踪装置和方法,将地面站天线的方位角和俯仰角的计算转换为平面夹角的计算,提高了计算误差精度,使得天线跟踪精度可以实现10
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
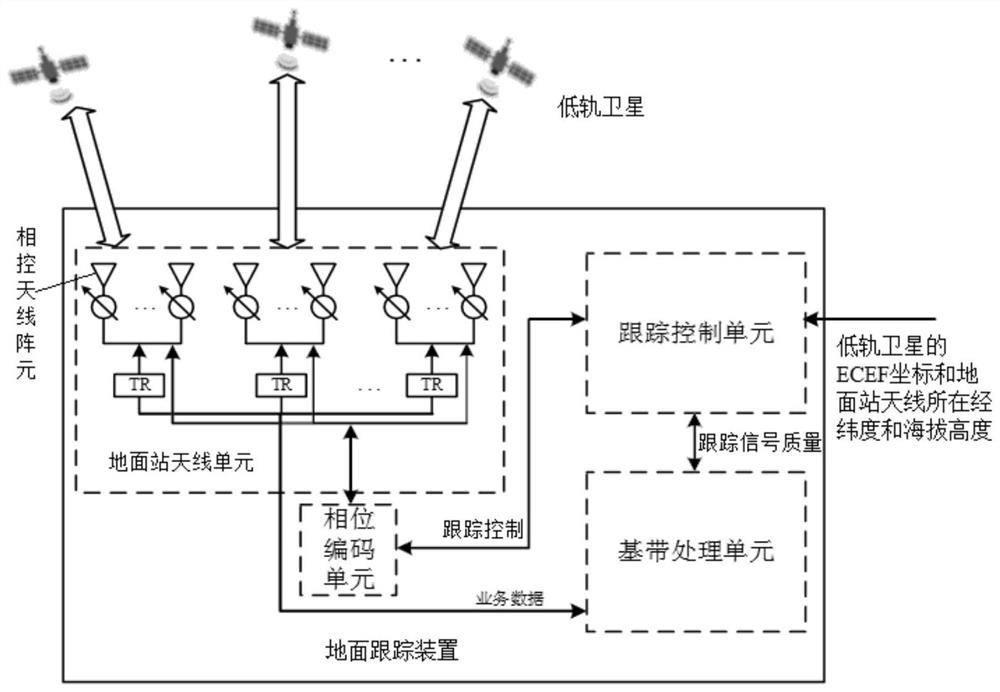
图1为本发明一种装置结构示意图;
图2为本发明方法流程示意图;
图3为本发明利用STK仿真统计的方位角和俯仰角的误差示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
在以下描述中,为了提供对本发明的透彻理解阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本发明。在其他实例中,为了避免混淆本发明,未具体描述公知的结构、电路、材料或方法。
在整个说明书中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味着:结合该实施例或示例描述的特定特征、结构或特性被包含在本发明至少一个实施例中。因此,在整个说明书的各个地方出现的短语“一个实施例”、“实施例”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和、或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。此外,本领域普通技术人员应当理解,在此提供的示图都是为了说明的目的,并且示图不一定是按比例绘制的。这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
实施例1
如图1所示,本实施例一种低轨卫星的地面跟踪装置,包括:
跟踪控制单元,用于计算低轨卫星对应的地面站天线方位角和俯仰角;
相位编码单元,用于将所述地面站天线方位角和俯仰角转换为天线阵元相移值;
地面站天线单元,用于根据所述天线阵元相移值调整地面站天线相位,跟踪接收低轨卫星信号。
在一种实施方式中,所述地面站天线单元包括若干个相控天线阵元和若干个T/R组件,其中,多个相控天线阵元公用一个T/R组件,每个T/R组件跟踪接收一颗低轨卫星信号,地面站天线单元通过天线控制器控制馈电网络移相进行地面站天线相位的调整,由于移相能够补偿同一信号到达各个不同相控天线阵元而产生的时间差,所以此时相控天线阵元的输出同相叠加达到最大。当卫星过境时,多路阵元分别接收多颗卫星跟踪信号,并通过T/R组件将高频信号转换为中频信号,传递给基带处理单元。
上述地面跟踪装置还包括基带处理单元,对地面站天线单元跟踪接收到的低轨卫星信号进行采样量化,得到跟踪信号质量量化值。
在一种实施方式中,跟踪控制单元实时监控多路低轨卫星信号,接收跟踪信号质量量化值,根据跟踪信号质量量化值选取最优跟踪质量通道作为通信链路通道,并根据所述通信链路通道控制基带处理单元进行业务数据信号处理和发送。
在另一种实施方式中,所述基带处理单元根据跟踪信号质量量化值选取最优跟踪质量通道建立通信链路,并将选取的最优跟踪质量通道发送给所述跟踪控制单元,
所述跟踪控制单元根据所述最优跟踪质量通道控制基带处理单元进行业务数据信号处理和发送。
实施例2
如图2所示,本实施例与实施例1的区别在于,对于上述低轨卫星地面跟踪装置,提出一种低轨卫星的地面跟踪方法,包括以下步骤:
步骤S1、获取多颗低轨卫星的ECEF坐标和地面站天线所在经纬度和海拔高度;
步骤S2、将地面站天线所在线经纬度和海拔高度转换为ECEF坐标,得到地面站天线的 ECEF坐标;
具体地,上述步骤S2的具体过程为:
将地面站天线所在的经纬度转换为ECEF坐标系下的坐标(x,y,z),得到地面站天线在ECEF坐标系下的空间位置,具体过程为:
x=(N+H)cos(B)cos(L)
y=(N+H)cos(B)sin(L)
z=(N-Ne
其中,L表示经度,东经为正值,西经为负值;B表示纬度,北纬为正值,南纬为负值,H表示地面站天线所在的海拔高度;N表示修正半径,
步骤S3、以地面站天线为参考点,将ECEF坐标系进行旋转平移变换,得到以地面站天线为原点,正北为X轴的参考坐标系;
具体地,步骤S3中旋转平移转换的具体过程为:
步骤S31、以地心为原点旋转,分别绕Z轴旋转L度,Y轴旋转B'度,再绕Z轴旋转 180度,得到以地心为原点、Z轴沿着地心和地面站天线连线方向和X轴指向正北的地心坐标系,所述地心坐标系为:
其中,(E
步骤S32、根据所述地心坐标系,将地面站天线的ECEF坐标和低轨卫星的ECEF坐标转换为地心坐标系下的地心坐标,得到低轨卫星的地心坐标为(x1,y1,z1),地面站天线的地心坐标为(x2,y2,z2);
步骤S33、将所述地心坐标系分别沿X轴、Y轴、Z轴平移x2、y2、z2距离,得到以地面站天线为坐标原点,XOY平面为地面站天线所在的水平面,x轴指向正北、Y轴指向正西和Z轴垂直于XOY平面的参考坐标系;
步骤S34、根据所述参考坐标系,得到低轨卫星的参考坐标:
(x1′,y1′,z1′)表示低轨卫星在参考坐标系下的参考坐标。
步骤S4、根据所述参考坐标系,将所述低轨卫星的ECEF坐标转换为参考坐标;
步骤S5、根据所述参考坐标计算地面站天线的方位角和俯仰角;
进一步地,步骤S5计算方位俯仰角的具体过程为:
根据低轨卫星的参考坐标计算地面站天线的方位角和俯仰角,将地面站天线的方位角和俯仰角分别转换为平面夹角,则得到的地面站天线方位角和俯仰角为:
其中,Az表示地面站天线方位角,Az以正北为0度且顺时针方向为正;El表示地面站天线俯仰角,即地面站天线与大地水平面的夹角。
具体地,步骤S5计算方位俯仰角的具体过程为:
根据低轨卫星的参考坐标计算地面站天线的方位角和俯仰角,将地面站天线的方位角和俯仰角分别转换为平面夹角,则得到的地面站天线方位角和俯仰角为:
其中,Az表示地面站天线方位角,Az以正北为0度且顺时针方向为正;El表示地面站天线俯仰角,即地面站天线与大地水平面的夹角。
步骤S6、将方位角和俯仰角传递给相位编码单元进行计算,得到阵元的相移值,相位编码单元将所述相移值传递给地面站天线单元;
步骤S7、地面站天线单元根据所述相移值调整地面站天线的相位,控制T/R组件跟踪接收对应低轨卫星的信号。
上述地面站天线单元包括若干个相控天线阵元和若干个T/R组件,其中,多个相控天线阵元公用一个T/R组件,每个T/R组件跟踪接收一颗低轨卫星信号,地面站天线单元通过天线控制器控制馈电网络移相进行地面站天线相位的调整,由于移相能够补偿同一信号到达各个不同相控天线阵元而产生的时间差,所以此时相控天线阵元的输出同相叠加达到最大。
如图2所示,经过上述跟踪控制单元计算的天线方位角和俯仰角调整地面站天线的相位,使得此时接收到的低轨卫星信号位置误差在10
实施例3
为了更好的说明本发明达到的有益效果,本实施例使用stalink卫星作为卫星对象,分别于STK仿真结果进行了方位俯仰角的误差统计,统计结果如图3所示,根据仿真结果可知,采用本方法的方位误差精度都在10
可以理解的是本发明经过将地面站天线的方位角和俯仰角的计算转换为平面夹角的计算,天线的跟踪精度可以实现10
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种低轨卫星的地面跟踪装置和方法
- 低轨卫星地面站天线的跟踪装置