空投式飞行器上的模块化综合控制系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及飞行器的控制系统,具体涉及一种空投式飞行器上的模块化综合控制系统。
背景技术
现有技术中,空投式飞行器的制导控制系统由制导系统和控制系统组成。在现有的设计方法中,制导系统和控制系统要分开设计,数据与信号要依次经过制导系统和控制器的处理,最后传送给执行机构,并由执行机构对其所接收的指令做出响应。使用这种设计方法时,数据和信号在各个系统之间传递,容易产生响应延迟与误差积累,并且各个信号的传递容易发生干扰,从而使飞行器的响应不够精确,同时,需要在制导系统和控制系统中分别嵌入多块微处理器,增加了生产应用成本;
现有的控制系统涉及的部件较多,其硬件结构复杂,体积较大,空间利用率较低,在飞行器上浪费空间是及其可惜的浪费行为;
另外,目前在设计制造飞行器时,往往需要根据具体型号尺寸、飞行器的飞行环境以及飞行状态进行特有的控制系统设计,这种设计方法费时费力,提高了飞行器的产成本。如果能够提供一种通用的,适用于各种型号飞行器的模块化综合控制系统,就可以以此为基础进行飞行器的设计制造,能够极大地提飞行器的设计制造过程。
由于上述原因,本发明人对现有的飞行器中的控制系统做了深入研究,并且结合空投式飞行器自身的结构特点,设计出一种能够解决上述问题的空投式飞行器上的模块化综合控制系统。
发明内容
为了克服上述问题,本发明人进行了锐意研究,设计出一种空投式飞行器上的模块化综合控制系统,该系统中通过将电源电路板、主控电路板、惯导/卫导电路板、舵控电路板和舵机驱动板集中安装在支撑壳体中,从而使得该控制系统实现小型化、集成化和模块化,能够将空投式飞行器所需要的传感器都集成在该模块化的壳体中,通过合理搭配各个板材及元器件之间的相互作用关系,使得系统整体的工作性能稳定可靠,从而完成本发明。
具体来说,本发明的目的在于提供以一种空投式飞行器上的模块化综合控制系统,该控制系统包括电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4、舵机驱动板5和支撑壳体6;
其中,电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4和舵机驱动板5彼此平行排布,彼此之间留有预定间隙,都固定安装在所述支撑壳体6中。
其中,该控制系统上还设置有限位连杆7,通过该限位连杆7依次穿过电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4和舵机驱动板5,并使其固接为一体结构。
其中,在所述电源电路板1上设置有隔离式电源模块,通过设置该隔离式电源模块使得一次电地与二次电地隔离。
其中,在所述电源电路板1上还设置有多组光耦和MOS管,通过所述光耦和MOS管进行发动机和引信的上电控制,还通过所述光耦和MOS管激活热电池。
其中,在所述电源电路板1上还设置有TLP281光耦芯片,通过该TLP281光耦芯片使得主控电路板2实时获知飞行器与载机之间的连接状态。
其中,主控电路板2采用STM32F429芯片;
优选地,主控电路板2与外围设备采用RS422通讯,每路RS422通讯均采用MAXIM的MAX3490芯片作为通讯的电平转换芯片,并将RS422的差分通讯信号转化为单端TTL信号。
其中,惯导/卫导电路板3中集成有卫星接收天线、惯导模块、卫导解算模块;
通过所述卫星接收天线接收GPS和BD两种信号;
通过所述卫导解算模块实时获得位置、速度和时间信息;
通过所述惯导模块包括陀螺仪和MEMS加速度计。
其中,所述卫星接收天线包括有源天线一和有源天线二,所述卫导解算模块包括合路器、下变频电离、A/D转换电路和基带处理模块;
通过所述合路器对来自有源天线一和有源天线二的两路射频信号进行合路;
通过所述下变频电路模块将射频信号转换为便于基带处理的模拟中频信号;
通过所述A/D转换电路模块将模拟器中频信号转换为数字中频信号;
通过基带处理模块进行抗窄带干扰处理、基带定位解算以及与主控电路板2的通讯。
本发明所具有的有益效果包括:
(1)根据本发明提供的空投式飞行器上的模块化综合控制系统将多个器件单元集中到一起,减少了资源利用率与空间利用率,从而相比于同等规格的飞行器,能够携带更大的战斗部;
(2)根据本发明提供的空投式飞行器上的模块化综合控制系统采用小型化、集成化和模块化的设计方法,具有极强的通用性,生产流程得到简化,应用范围广,适于大批量生产。
附图说明
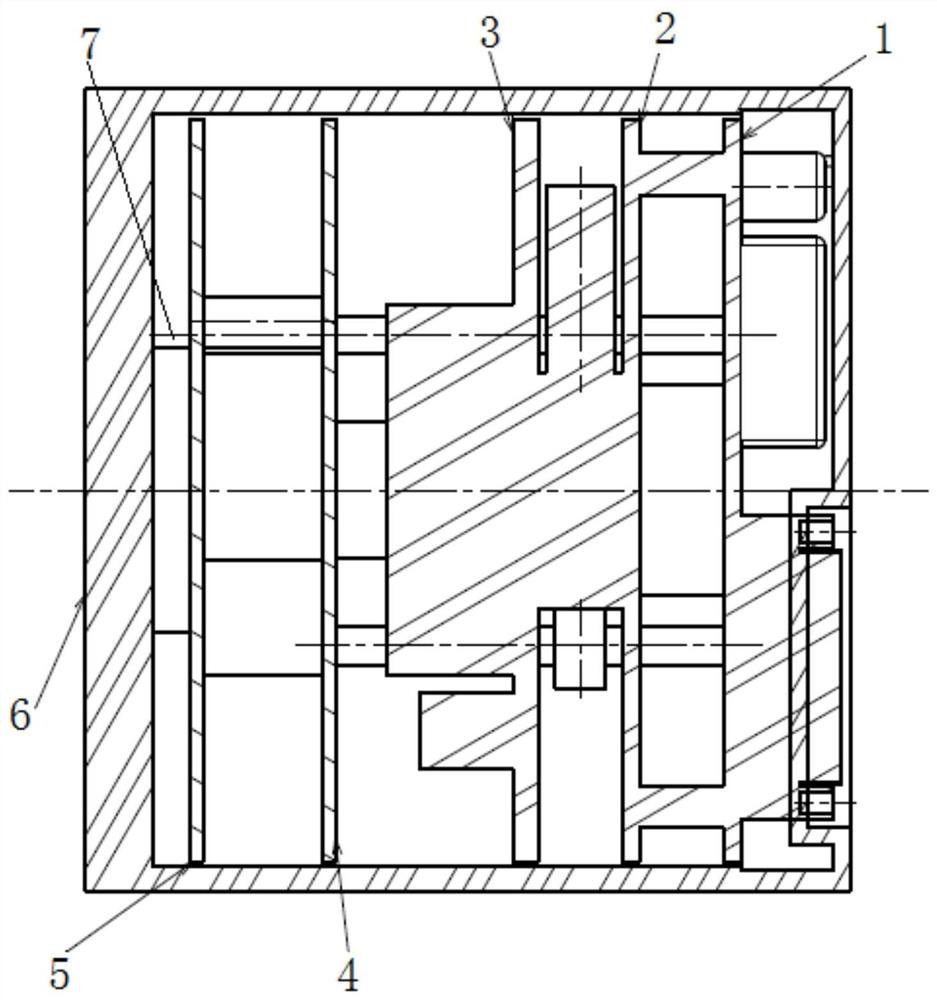
图1示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统的整体结构剖视图;
图2示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统的整体结构示意图;
图3示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中电源电路板的示意图;
图4示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中主控电路板的示意图;
图5示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中惯导/卫导电路板的示意图;
图6示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中卫导解算模块的示意图;
图7示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中惯导模块的示意图;
图8示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中光耦芯片输出分离信号时的示意图;
图9示出根据本发明一种优选实施方式的空投式飞行器上的模块化综合控制系统中光耦芯片输出地址信号时的示意图。
附图标号说明:
1-电源电路板
11-隔离式电源模块
12-MOS管
13-光耦
14-光耦芯片
15-电源检测电路
16-浪涌抑制器
17-开关二极管
2-主控电路板
21-STM32F429芯片
22-MAX3490芯片
23-LDO电源芯片
3-惯导/卫导电路板
31-惯导模块
32-卫导解算模块
4-舵控电路板
5-舵机驱动板
6-支撑壳体
7-限位连杆
8-电连接器
具体实施方式
下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
根据本发明提供的空投式飞行器上的模块化综合控制系统,如图1和图2中所示,该控制系统包括电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4、舵机驱动板5和支撑壳体6;该控制系统上还设置有限位连杆7,通过该限位连杆7依次穿过电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4和舵机驱动板5,并使其固接为一体结构并与支撑壳体6固接,以便于同步移动安装,同时确保各个电路板之间不会相对串动。
优选地,通过螺钉定位,并将各个电路板连接固定在限位连杆7上。
在各个电路板之间还设置有尼龙垫柱,通过尼龙垫柱保证各个电路板间的相对距离,同时起到缓冲和绝缘的作用。优选地,在所述支撑壳体6的两端还开设有豁口,用以使得电连接器8从所述支撑壳体6中伸出。
优选地,电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4和舵机驱动板5板体的厚度都为2mm,且彼此依次平行排布,彼此之间留有预定间隙,都固定安装在所述支撑壳体6中;更优选地,电源电路板1板体和主控电路板2板体之间的距离为11mm,主控电路板2板体和惯导/卫导电路板3板体之间的距离为11mm,惯导/卫导电路板3板体和舵控电路板4板体之间的距离为23mm,舵控电路板4板体和舵机驱动板5板体之间的距离为15mm。
本申请中,通过将上述电源电路板1、主控电路板2、惯导/卫导电路板3、舵控电路板4、舵机驱动板5集合为一体结构,并使其平行排布,缩小彼此之间的间隙,即可以使得控制系统高度集成化模块化,便于大批量生产装备,降低生产成本,还能够压缩控制系统的空间体积,为战斗部预留出更大的空间。
具体来说,本申请中通过具体地设置控制系统中上述板材间的空隙尺寸,使得该控制系统相比于飞行器中搭载的传统功能产品,节约体积53%,从而能够相比于传统飞行器携带更大的战斗部。
另外,本申请中通过合理搭配控制系统中各个电路板之间的相对位置关系及相对距离,并添加尼龙垫柱,从而确保彼此之间不会有信号干扰,各个电路板及其上的器件都能够正常工作,控制系统整体运行平稳可靠。
在一个优选的实施方式中,所述电源电路板1用于实现对飞行器上电源的管理,具体来说,所述电源电路板用于控制载机电源和热电池的供电分配、控制热电池激活、控制热电池供电等;同时保证载机供电与热电池供电的平稳切换;所述载机即为运载所述飞行器的飞机,当飞机到达预定位置时,投放该飞行器,该飞行器因为惯性会继续沿着飞机飞行的速度和方向继续滑翔,同时由于重力的作用,其滑翔轨迹为抛物线;所述飞行器被载机投放以后,飞行器上的电源供应由原本的载机供应调整为自身携带的热电池供应。
优选地,所述电源电路板1与载机上的电源相连,还与飞行器上的热电池相连,所述热电池与载机供电经过汇流后,为电源板板1提供28V电源,然后给模块化综合控制系统的其余部分供电。其中,载机供电上电默认是开启状态,也可以通过主控电路板2控制断开,热电池上电默认关闭状态,需要通过主控电路板2开启。
优选地,如图3中所示,所述电源电路板1上设置有DC/DC隔离式电源模块11,更优选地,设置有PDUKE的DC/DC隔离式电源模块LCD20-24S05。在+28V供电的情况下,模块化综合控制系统的峰值电流在5A以内,稳定工作时的电流不超过0.8A(20W),选择DC/DC的输出电压为+5V。
本申请中,通过设置该隔离式电源模块使得一次电地与二次电地隔离。所述一次电指的是直接由外部输入,未经处理的电源,二次电指的是将一次电经过滤波、隔离、转换等处理,可供弹载计算机内部模块使用的电源。
本申请中设置的该隔离式电源模块,包括组合使用的电感、电容等器件,使得两路电中的任何一路发生浪涌、纹波等现象均不会影响另一路。
优选地,通过模块化综合控制系统为飞行器上除模块化综合控制系统以外的其他器件进行供电的时序控制,控制信号由主控电路板2发出,在电源电路板1上设置MOS管12进行电源回路的通断控制。
所述其他器件包括发动机、热电池和引信等,其中,电源电路板1上设置多组光耦13和MOS管12,通过光耦和MOS管进行发动机和引信的上电控制,通过光耦和MOS管激活热电池。即至少设置有3组光耦和MOS管。
在收到主控电路板2发送的热电池激活命令之后,将载机对热电池的激活供电打开,完成热电池的激活,电池激活的电流要求不小于4A、不大于15A、标准值4A,持续150ms。所述光耦和MOS管选用Infineon的IRFR5305PBF和AVAGO的ACPL-024L光耦芯片。
优选地,在所述电源电路板1上还设置有TLP281光耦芯片14,如图3、图8和图9中所示,TLP281光耦芯片的输入端与载机相连,输出端与主控电路板2相连,当飞行器与载机正常连接时,所述输出端能够传递出地址信号,当飞行器与载机断开时,所述输出端能够传递出分离信号,从而使得主控电路板2实时获知飞行器与载机之间的连接状态。
优选地,在所述电源电路板1上还设置有电源检测电路15,通过该电源检测电路在自检、周期检测等检测过程中,对系统的供电电压和电流进行监测;由于系统上供电的各个部分处于不同的供电回路,所以电源检测电路与主控电路板的处理电路有地的隔离。本申请中对前端供电电压电阻分压经过光耦隔离后给到主控电路板2,用于系统的上电检测等。
优选地,在所述电源电路板1上还设置有浪涌抑制器16和开关二极管17,通过浪涌抑制器对瞬态浪涌电压进行抑制,通过所述开关二极管进行反接保护。综合考虑体积和可靠性,选择Littelfuse(美国力特)的SMBJ36A瞬态抑制二极管,从而使得电源电路板1具有瞬态电压抑制、可调的输出钳位电压、反接保护和过流保护等功能。
优选地,所述电连接器8也安装在所述电源电路板1上,通过将电连接器8和隔离式电源模块11分别设置在电源电路板1的三个方位,使得电源电路板整体重量基本均衡,再通过选择设置光耦、浪涌抑制器、MOS管等器件,使得电源电路板1的质心位于中心位置。
在一个优选的实施方式中,所述主控电路板2用以实现软件的加载、计算、串口通信、时序输出、开关量接收等功能,进而实现飞行控制。
优选地,在飞行器挂载在飞机上以后,通过主控电路板2接收并传递识别信号,从而与载机相互识别,并根据电路上的检测信息完成飞行器上设备的自检操作;在飞行器随着飞机起飞后,接收飞机传递来的目标信息和载机信息,所述目标信息包括目标的位置和速度信息,所述载机信息包括载机的位置、速度和姿态信息;在载机准备投放该飞行器时,接收发射指令,并据此激活搭载在飞行器上的热电池;在飞行器被空投出以后,启动控制程序,稳定飞行器的飞行姿态。
优选地,如图4中所示,主控电路板2在硬件上采用STM32F429芯片21,最高主频为180M,支持CF卡,SRAM,PSRM,NOR和NAND存储器,内置SPI、USART、USB、CAN、SDIO等多种接口控制器;具有睡眠、停机和待机三种模式,从而降低芯片的功耗。
所述主控电路板2与外围至少五种设备采用RS422通讯,每路RS422通讯均采用MAXIM的MAX3490芯片22作为通讯的电平转换芯片,并将RS422的差分通讯信号转化为单端TTL信号。所述五种设备包括惯性测量装置、卫星接收装置、舵机控制板、导引头和数据记录仪。
所述主控电路板2的供电电压为+3.3V,采用TI的LM1117IMPX-3.3V对主控电路板组件板进行供电;所述LM1117IMPX-3.3V为LDO电源芯片23,系统电源板将5V供电转为3.3V供给处理器,该芯片可提供最高800mA电流,并且外部配置电路简单,从而可以减少对PCB板面积的占用。
在一个优选的实施方式中,惯导/卫导电路板3用于提供惯性测量参数和卫星导航参数,具有很高的导航测量精。具体来说,如图5所示,在惯导/卫导电路板3中集成有卫星接收天线、惯导模块31、卫导解算模块32等器件,其中所述惯导模块31为MEMS惯导,所述卫星接收天线能够接收GPS和BD两种信号,卫导解算模块采集卫星天线接收的卫星信号,经过抗干扰处理后,将卫星数据送入主控电路板2。
优选地,所述卫导解算模块具备抗窄带干扰功能,用于为主控电路板提供实时位置、速度和时间信息;卫星接收天线同时接收机载和弹载两路信号,在飞行器挂载在载机的阶段,通过机载天线接收卫星信息;在飞行器被投放以后,通过卫星接收天线进行定位。
优选地,所述卫星接收天线包括有源天线一和有源天线二,其中,有源天线一设置在飞行器即弹体外壳上,有源天线二设置在载机上;
优选地,如图6中所示,所述卫导解算模块包括合路器、下变频电路模块、A/D转换电路模块和基带处理模块。
通过所述合路器对来自有源天线一和有源天线二的两路射频信号进行合路,以实现双天线功能。具体来说,在实际挂机使用时,有源天线一安装在弹体外壁上,作为弹载天线,其体积、增益较小,有源天线二安装在载机上,通过射频线缆将信号接入弹体内,再连接到弹载计算机上,作为机载天线,其体积较大,增益较大。
本申请中设置两个有源天线,能够确保飞行器定位效果的稳定性;当飞行器挂机飞行时,弹载的有源天线一极有可能被载机的金属外壳或者金属挂架所遮挡,无法完成收星定位,此时接入的机载的有源天线二安装在载机不被遮挡的合适位置,可以正常收到卫星信号,从而使得弹载计算机卫星接收装置依然可获得用于计算星历和定位的卫星信号,避免了挂机过程中弹载有源天线一被遮挡,飞行器无法完成定位的问题。
通过所述下变频电路模块将射频信号转换为便于基带处理的模拟中频信号,该下变频电路模块可以采用广州润芯生产的射频芯片实现;
通过所述A/D转换电路模块将模拟器中频信号转换为数字中频信号,以便于进行抗窄带干扰处理和基带解算;该A/D转换电路采用AD芯片实现;
通过基带处理模块进行抗窄带干扰处理、基带定位解算以及与主控电路板2的通讯,该模块采用多模多频基带芯片实现。多模多频基带芯片采用32位高性能ARM嵌入式处理器,内置BDS/GPS/GLONASS/GALILEO算法引擎的基带模块,NOR-Flash和SDRAM/SRAM存储控制器,DMA控制器,USB1.1设备和其他相关IO外围设备。
优选地,所述惯导模块如图5和图7中所示,该惯导模块包括陀螺仪和MEMS加速度计,且所述惯导模块是一个封装后的整体组合式模块,陀螺仪和加速度计均封装在其内部。
本申请中优选地,将所述惯导模块31和卫导解算模块32分别安装设置在惯导/卫导电路板的两个面上,从而使得惯导/卫导电路板的质心位于其中心位置。
在一个优选的实施方式中,所述舵控电路板4用于完成系统4路舵机的控制及驱动功能;
通过所述舵机驱动板5控制舵机打舵工作,进而调整飞行器的飞行姿态。
以上结合了优选的实施方式对本发明进行了说明,不过这些实施方式仅是范例性的,仅起到说明性的作用。在此基础上,可以对本发明进行多种替换和改进,这些均落入本发明的保护范围内。
- 空投式飞行器上的模块化综合控制系统
- 一种适用于空投的单兵背负式大载荷多旋翼飞行器