可调式安全带及其自动控制方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及汽车安全领域,具体涉及一种可调式安全带及其自动控制方法。
背景技术
不同体型的驾驶员乘坐位置不同,但安全带安装在车身上以后所有固定点均不能移动,对于95%男性,织带容易割脖子,对于5%女性,织带容易从肩膀滑落;同时驾乘人员在佩戴安全带的时候,为了保证接插便利性,往往希望带扣能高出座椅较多,但是带扣低于或平于座椅,对于驾乘人员舒适性和安全性更优。
中国专利(公开日:2016年11月02日、公开号:CN106064603A)公开了一种系统包括座椅安全带高度调节器、包括拉出量传感器的座椅安全带卷收器和座椅。座椅包括座椅位置传感器和配置为测量座椅的乘员的重量的重量传感器。系统包括与拉出量传感器、座椅位置传感器、以及重量传感器通信的控制模块。控制模块被编程为至少根据拉出量和座椅位置来计算乘员的尺寸。控制模块被编程为至少根据乘员的尺寸和重量来调节座椅安全带高度调节器的位置。但其仅仅调节了安全带的高度,并没有涉及调节安全带下端固定点的前后位置,也即,其可以根据乘员的身高来调整安全带的高度,但是忽略了乘员的体型的大小来调整安全带下端固定点的位置。
中国专利(公开日:2019年03月19日、公开号:CN208615893U)公开了一种车辆安全带下固定点结构,包括长条齿形卡槽,长条齿形卡槽被固定在汽车座椅底板上,在长条齿形卡槽上侧设置有一个滑块,所述滑块一端侧面设置连接块,连接块连接安全带下卡座,所述滑块的下端面设置有与所述沿所述长条齿形卡槽相对应的齿形凸起,滑块侧面还连接有一个推臂,所述推臂连接在一个支架上,支架与长条齿形卡槽相对固定连接,所述推臂带动滑块提起、落下。本实用新型将安全带下固定点设置在一个可沿长条齿形卡槽前后移动的滑块上,滑块与长条齿形卡槽之间形成锁扣关系,该关系通过一个推臂实现开锁与锁定,结构简单紧凑,操作方便,提高驾驶员佩戴舒适性。但安全带的下固定点仍需手动调节,不能根据人体自动调节,用户体验感不好。
中国专利(公开日:2019年11月01日、公开号:CN110395147A)公开了一种车用座椅调节装置、方法及车用座椅。本发明的车用座椅调节装置包括:人体识别模块,用于检测车用座椅上的当前乘员的人体形态信息;控制模块,用于根据人体形态信息计算对应的人体轮廓模型,并将人体轮廓模型与预存的儿童体型模型进行比对以判断当前乘员是否为儿童,并在判定当前乘员为儿童时,根据人体轮廓模型计算出适应于儿童乘坐的座椅参数,并基于座椅参数生成对应的控制信号;以及执行机构,用于根据控制信号进行座椅位置调节和/或安全带调节。本发明通过判断乘员的人体轮廓模型来预判乘员的年龄,以确认是否开启儿童座椅,若是再将座椅自动调整为适应对应年龄段儿童的乘坐需求。但其调整的只是安全带的长度以及伸出位置,并没有调整安全带的固定点的位置,以便更适合的匹配不同人体体型。
发明内容
本发明的目的就是针对上述技术的不足,提供一种可调式安全带及其自动控制方法,佩戴时通过安全带上固定点高度可调、下固定点前后方向可调、带扣高度可调,适应不同体型驾驶员舒适性和安全性能的需求。
为实现上述目的,本发明所设计的可调式安全带,包括织带和套置在所述织带上的锁舌,所述织带的上端穿过导向环连有卷收器,所述导向环连接在上固定点高度调节器上,所述织带的下端连有端片,所述端片连接在端片前后调节器上,所述锁舌与带扣配合,所述带扣连接在带扣升降旋转装置上。
优选地,所述上固定点高度调节器包括竖向的第一底板,所述第一底板上设有两条竖向的第一齿条,车体上转动安装有与两条所述第一齿条配合的第一齿轮,所述第一齿轮连有驱动其转动的第一电机,所述底板上焊接有凸台,所述导向环连接在所述凸台上,最终实现了所述导向环能根据驾驶员体型,上下移动到对应标准位置。
优选地,所述端片前后调节器包括安装在车体上的第二电机,所述第二电机的转轴通过联轴器连有丝杠,所述丝杠上套有滑块,所述滑块连有所述端片,最终实现了所述端片能根据驾驶员体型,前后移动到对应标准位置,从而满足不同体型驾乘人员的坐姿,保证安全带良好的包覆性。
优选地,所述带扣升降旋转装置包括竖向的第二底板和通过螺栓固定在车上的安装板,所述安装板上安装有第三电机,所述第三电机的转轴上套置安装有第二齿轮,所述第二底板上设有两条竖向的第二齿条,所述第二齿轮与两条所述第二齿条配合安装,所述第二底板的上部铰接有水平的转动轴,所述转动轴的正面安装在第四电机的转轴上,所述第四电机固定在所述第二底板上,所述转动轴的背面连有竖向的带扣连接板,所述带扣安装在所述带扣连接板的端部,从而实现所述带扣佩戴时根据人体体型升高到标准佩戴位置,方便接插,接插完成后根据人体体型带扣下降到标准乘坐位置,保证舒适性和安全性,同时还能实现不佩戴时所述带扣放倒避免进异物。
优选地,还包括布置在座椅上体重传感器和若干个压力传感器,座椅靠背上设有若干个压力传感器,所述体重传感器和压力传感器均与安全带控制器电连,所述安全带控制器与所述第一电机、第二电机、第三电机和第四电机电连。
优选地,所述体重传感器和压力传感器将取得的人体体重、臀部接触面积以及背部接触面积信号输入到所述安全带控制器中,通过标准数据库搜索,得出乘坐人员的人体体型数据以及对应的标准安全带位置,即所述端片的X向坐标、所述导向环的Z向坐标和所述带扣的Z向坐标,所述标准数据库内设有与人体体重、臀部接触面积以及背部接触面积相匹配的所述端片的X向坐标、所述导向环的Z向坐标和所述带扣的Z向坐标。
优选地,所述带扣的Z向坐标包括佩戴位置和乘坐位置2个Z向坐标。
优选地,所述导向环、端片和带扣上均布置了位置传感器,所述位置传感器与所述安全带控制器电连,所述位置传感器将位置坐标信号输入到所述安全带控制器中,从而控制器计算出所述端片的X向移动距离,所述导向环的Z向移动距离和所述带扣的Z向移动距离,从而控制所述上固定点高度调节器、端片前后调节器和带扣升降旋转装置运行,使所述导向环、端片和带扣移动到体型对应的标准位置。
一种所述可调式安全带的自动控制方法,驾乘人员上车后,所述体重传感器和压力传感器将取得的人体体重、臀部接触面积以及背部接触面积信号输入到所述安全带控制器中,通过标准数据库搜索,得出乘坐人员的人体体型数据以及对应的标准安全带位置,即所述端片的X向坐标、所述导向环的Z向坐标和所述带扣的Z向坐标,所述带扣的Z向坐标包括佩戴位置和乘坐位置2个Z向坐标,此时先使用所述带扣佩戴位置的Z向坐标计算,同时,所述位置传感器将所述导向环、端片和带扣的位置坐标信号输入到所述安全带控制器中,从而所述安全带控制器计算出所述端片的X向移动距离、所述导向环的Z向移动距离和所述带扣的Z向移动距离,从而计算出所述第一电机、第二电机、第三电机和第四电机旋转的圈数以及时间,将电流接通时间信号传输给所述第一电机、第二电机、第三电机和第四电机,从而驱动其旋转,最终让所述导向环、端片和带扣移动到体型对应的标准位置,然后驾乘人员佩戴安全带,插上锁舌;所述锁舌接插完毕后,所述带扣上安全带未系提醒电路将电信号传输到所述安全带控制器中,所述安全带控制器根据人体体型对应的所述带扣的乘坐位置Z向坐标,计算出所述带扣乘坐位置相对于佩戴位置需要向下移动的距离,从而得出所述第三电机反转的圈数以及时间,将电流接通时间信号传输给所述第三电机,从而驱动所述第三电机反转,带动所述带扣下降到乘坐位置。
优选地,当所述安全带控制器通过所述体重传感器和压力传感器的信号检测到没有驾乘人员乘坐时,控制所述第四电机驱动所述带扣绕以所述转动轴为圆心转动,使所述带扣放倒。
本发明与现有技术相比,具有以下优点:
1、针对不同体型驾乘人员,导向环、端片、带扣可以适应性上下或前后移动,当驾乘人员坐在座椅上时,导向环移动高指定高度,端片移动到指定前后位置,带扣升高到指定位置方便人员佩戴,当锁舌接插上后,带扣降低到指定位置,从而满足安全带包覆性,提高安带舒适性和便利性;
2、在不佩戴的情况下,保持带扣放倒状态,避免异物通过带扣开口掉入。
附图说明
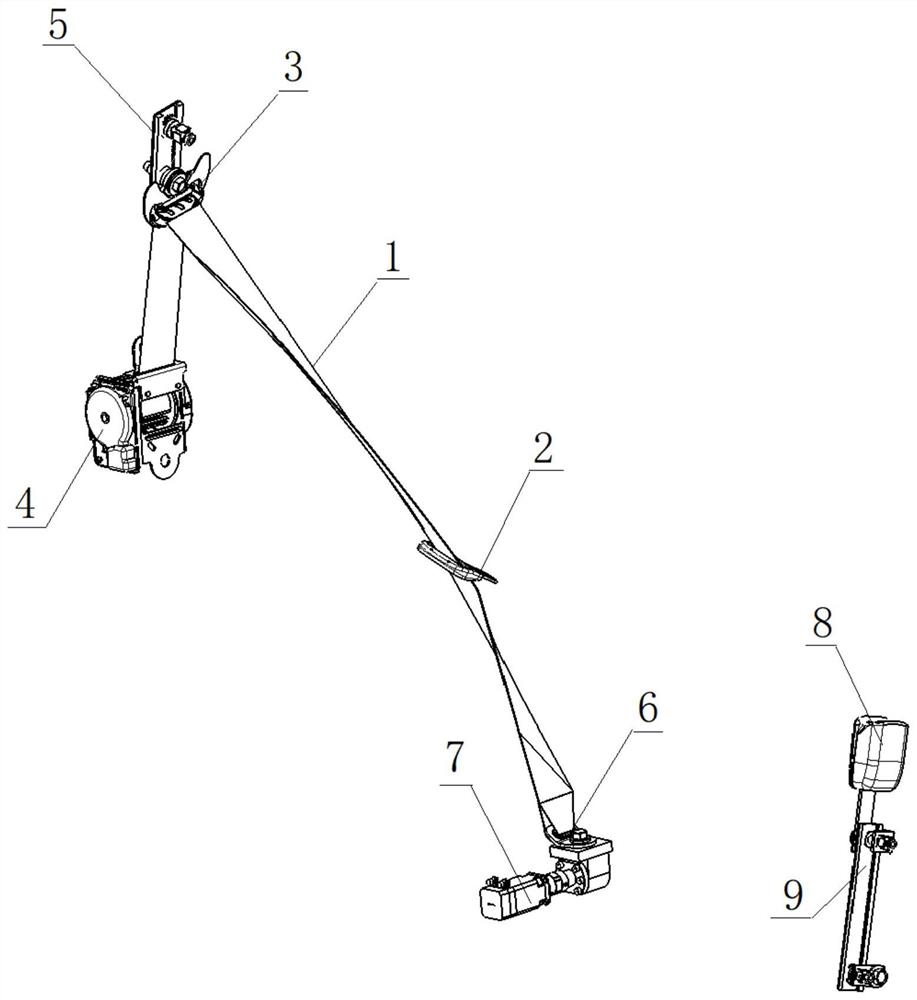
图1为本发明可调式安全带的结构示意图;
图2为图1中上固定点高度调节器的结构示意图;
图3为图1中端片前后调节器的结构示意图;
图4为图1带扣升降旋转装置的结构示意图。
图中各部件标号如下:
织带1、锁舌2、导向环3、卷收器4、上固定点高度调节器5、端片6、端片前后调节器7、带扣8、带扣升降旋转装置9、第一底板10、第一齿条11、第一齿轮12、第一电机13、凸台14、第二电机15、联轴器16、丝杠17、滑块18、第二底板19、螺栓20、安装板21、第三电机22、第二齿轮23、第二齿条24、转动轴25、第四电机26、带扣连接板27。
具体实施方式
下面结合附图和具体实施例对本发明作进一步的详细说明。
如图1所示,本发明一种可调式安全带,包括织带1和套置在织带1上的锁舌2,织带1的上端穿过导向环3连有卷收器4,导向环3连接在上固定点高度调节器5上,织带1的下端连有端片6,端片6连接在端片前后调节器7上,锁舌2与带扣8配合,带扣8连接在带扣升降旋转装置9上。
另外,如图2所示,上固定点高度调节器5包括竖向的第一底板10,第一底板10上设有两条竖向的第一齿条11,车体上转动安装有与两条第一齿条11配合的第一齿轮12,第一齿轮12连有驱动其转动的第一电机13,底板10上焊接有凸台14,导向环3连接在凸台14上。
如图3所示,端片前后调节器7包括安装在车体上的第二电机15,第二电机15的转轴通过联轴器16连有丝杠17,丝杠17上套有滑块18,滑块18连有端片6,第二电机15运行时,带动联轴器16转动,从而带动丝杠17转动,丝杠17旋转带动滑块18前后移动。
如图4所示,带扣升降旋转装置9包括竖向的第二底板19和通过螺栓20固定在车上的安装板21,安装板21上安装有第三电机22,第三电机22的转轴上套置安装有第二齿轮23,第二底板19上设有两条竖向的第二齿条24,第二齿轮23与两条第二齿条24配合安装,第二底板19的上部铰接有水平的转动轴25,转动轴25的正面安装在第四电机26的转轴上,第四电机26固定在第二底板19上,转动轴25的背面连有竖向的带扣连接板27,带扣8安装在带扣连接板27的端部。
本实施例中,还包括布置在座椅上体重传感器和若干个压力传感器,座椅靠背上设有若干个压力传感器,体重传感器和压力传感器均与安全带控制器电连,安全带控制器与第一电机13、第二电机15、第三电机22和第四电机26电连。体重传感器和压力传感器将取得的人体体重、臀部接触面积以及背部接触面积信号输入到安全带控制器中,通过标准数据库搜索,得出乘坐人员的人体体型数据以及对应的标准安全带位置,即端片6的X向坐标、导向环3的Z向坐标和带扣8的Z向坐标,标准数据库内设有与人体体重、臀部接触面积以及背部接触面积相匹配的端片6的X向坐标、导向环3的Z向坐标和带扣8的Z向坐标,其中,带扣8的Z向坐标包括佩戴位置和乘坐位置2个Z向坐标。
同时,导向环3、端片6和带扣8上均布置了位置传感器,位置传感器与安全带控制器电连,位置传感器将位置坐标信号输入到安全带控制器中,从而控制器计算出端片6的X向移动距离,导向环3的Z向移动距离和带扣8的Z向移动距离,从而控制上固定点高度调节器5、端片前后调节器7和带扣升降旋转装置9运行,使导向环3、端片6和带扣8移动到体型对应的标准位置。
本实施例使用时,其自动控制方法如下,驾乘人员未上车时,导向环3、端片6和带扣8均在初始位置,当驾乘人员上车后,体重传感器和压力传感器将取得的人体体重、臀部接触面积以及背部接触面积信号输入到安全带控制器中,通过标准数据库搜索,得出乘坐人员的人体体型数据以及对应的标准安全带位置,即端片6的X向坐标、导向环3的Z向坐标和带扣8的Z向坐标,带扣8的Z向坐标包括佩戴位置和乘坐位置2个Z向坐标,此时先使用带扣8佩戴位置的Z向坐标计算,同时,位置传感器将导向环3、端片6和带扣8的位置坐标信号输入到安全带控制器中,从而安全带控制器计算出端片6的X向移动距离、导向环3的Z向移动距离和带扣8的Z向移动距离,从而计算出第一电机13、第二电机15、第三电机22和第四电机26旋转的圈数以及时间,将电流接通时间信号传输给第一电机13、第二电机15、第三电机22和第四电机26,从而驱动其旋转,最终让导向环3、端片6和带扣8移动到体型对应的标准位置,然后驾乘人员佩戴安全带,插上锁舌2;锁舌2接插完毕后,带扣8上安全带未系提醒电路将电信号传输到安全带控制器中,安全带控制器根据人体体型对应的带扣8的乘坐位置Z向坐标,计算出带扣8乘坐位置相对于佩戴位置需要向下移动的距离,从而得出第三电机22反转的圈数以及时间,将电流接通时间信号传输给第三电机22,从而驱动第三电机22反转,带动带扣8下降到乘坐位置。
另外,当安全带控制器通过体重传感器和压力传感器的信号检测到没有驾乘人员乘坐时,控制第四电机26驱动带扣8绕以转动轴25为圆心转动,使带扣8放倒。
本发明可调式安全带及其自动控制方法,针对不同体型驾乘人员,导向环3、端片6、带扣8可以适应性上下或前后移动,当驾乘人员坐在座椅上时,导向环3移动高指定高度,端片6移动到指定前后位置,带扣8升高到指定位置方便人员佩戴,当锁舌2接插上后,带扣8降低到指定位置,从而满足安全带包覆性,提高安带舒适性和便利性;同时,在不佩戴的情况下,保持带扣8放倒状态,避免异物通过带扣8开口掉入。
- 可调式安全带及其自动控制方法
- 安全带自动回收控制方法、控制器及控制系统