一种辅助进食机器人
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及医疗护理技术领域,具体而言,涉及一种辅助进食机器人。
背景技术
随着国内老龄化的日益严重,根据民政部发布的数据,2020年末,全国养老床位总数为:8238476张,养老机构数为:38069个,全国民政事业费累计支出4229.4亿元。可见养老需求越来越大。
除生活不能完全自理的老人,一些双臂有缺失的残疾人甚至是儿童,也有自助进食的需求。
发明内容
本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
有鉴于此,本发明的目的在于提供一种辅助进食机器人。
为了实现上述目的,本发明的技术方案提供了一种辅助进食机器人,包括:底盘和碗托,所述碗托转动设置在所述底盘上,所述底盘上设置有用于驱动所述碗托转动的第一驱动机构,所述碗托上形成有容纳碗体的容纳槽,至少一个所述容纳槽内设置有电加热装置,每个所述电加热装置对应设置有加热启动开关;
用于盛放食物的碗体,可拆卸设置在所述容纳槽内;
机械臂机构,设置在所述底盘上,所述机械臂机构的末端连接有专用的勺子;
控制器,与所述第一驱动机构通信连接,所述控制器用于控制所述机械臂机构运动,以使所述勺子舀取所述碗体内食物。
在上述技术方案中,优选地,还包括:
检测开关,固设于所述底盘上;
感应凸起,与所述容纳槽一一对应设置,所述感应凸起用于在对应的所述容纳槽转动至预设位置时使所述检测开关触发;
所述控制器与所述检测开关通信连接,所述控制器还用于在接收到用于指示所述碗托旋转的第一控制指令的情况下,控制所述第一驱动机构带动所述碗托旋转,并在接收到所述检测开关的触发信号的情况下,控制所述第一驱动机构停止工作。
在上述任一技术方案中,优选地,所述勺子与所述机械臂机构可拆卸连接。
在上述任一技术方案中,优选地,所述控制器被配置为通过以下方式控制所述机械臂机构带动所述勺子舀取所述碗体内的食物:
带动所述勺子沿第一水平方向运动的过程中先使所述勺子伸入所述碗体内预设高度,后使所述勺子向上运动并脱离所述碗体内的食物;
带动所述勺子沿与所述第一水平方向相反的第二水平方向运动并保持高度不变,以脱离所述碗体。
在上述任一技术方案中,优选地,所述控制器还被配置为通过以下方式控制所述机械臂机构带动所述勺子舀取所述碗体内的食物:
在带动所述勺子沿与所述第二水平方向运动并保持高度不变的情况下,在所述勺子的底部与所述碗体的上边缘接触后,使所述勺子继续沿所述第二水平方向移动,以使所述勺子脱离所述碗体。
在上述任一技术方案中,优选地,所述机械臂机构包括:
底座,转动设置在所述底盘上,所述底盘上设置有用于驱动所述底座转动的第二驱动机构;
转动臂机构,与所述底座的上侧转动连接,所述转动臂结构的一端与底座转动连接,另一端与所述勺子连接,所述底座上设置有用于驱动所述转动臂机构转动的第三驱动机构,
其中,所述转动臂机构的转轴与所述底座的转轴垂直。
在上述任一技术方案中,优选地,所述转动臂机构包括:
第一转动臂和第二转动臂,所述第一转动臂的两端分别与所述底座以及所述第二转动臂转动连接,所述第二转动臂的两端分别与所述第一转动臂以及所述勺子连接,所述第三驱动机构与所述第一转动臂连接;
所述辅助进食机器人还包括:
第四驱动机构,设置在所述第一转动臂上且用于驱动所述第二转动臂转动。
在上述任一技术方案中,优选地,所述第二转动臂远离所述第一转动臂的一端设置有直流电机,所述直流电机通过传动机构与所述勺子连接。
在上述任一技术方案中,优选地,所述控制器被配置为通过以下方式控制所述机械臂机构带动所述勺子舀取所述碗体内的食物:
根据预设的所述勺子舀取食物的舀取路径确定多个位置点;
确定所述每个所述位置点对应的所述第二驱动机构、所述第三驱动机构、所述第四驱动机构以及所述直流电机的驱动量;
在目标碗体位于预设位置的情况下,确定当前位置点对应的控制量,并根据所述控制量控制所述二驱动机构、所述第三驱动机构、所述第四驱动机构以及所述直流电机工作;
在当前位置点不是最后一个位置点的情况下,确定当前位置点的下一个位置点为当前位置点,并重新执行所述确定当前位置点对应的控制量,并根据所述控制量控制所述二驱动机构、所述第三驱动机构、所述第四驱动机构以及所述直流电机工作的步骤;
在当前位置点是最后一个位置点的情况下,控制所述第二驱动机构、所述第三驱动机构、所述第四驱动机构以及所述直流电机停止工作。
通过上述技术方案,碗体可以盛放食物,通过控制机械臂运动,能够使勺子舀取碗体内的食物,实现辅助进食。同时,由于碗体可拆卸设置在容纳槽内,方便对碗体的清洁,每个电加热装置对应设置有加热启动开关,能够根据需要对碗体进行单独加热,易于使用,多个碗体能够同时盛放不同的食物,便于满足多样化的进食需求。
本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
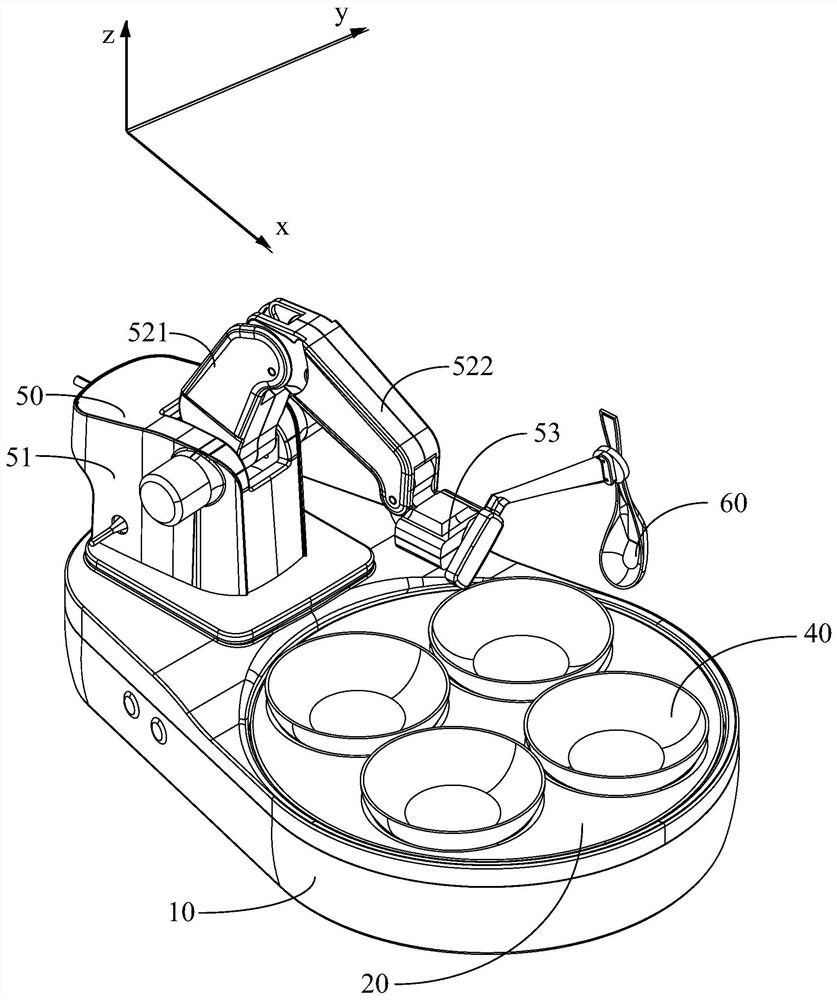
图1是根据本发明的一个实施例的辅助进食机器人的立体结构示意图;
图2是根据本发明的一个实施例的辅助进食机器人的立体结构示意图;
图3是根据本发明的一个实施例的辅助进食机器人的剖视图;
图4是根据本发明的一个实施例的辅助进食机器人的部分结构示意图;
图5是图4中A部分的局部放大图;
图6是根据本发明的一个实施例的辅助进食机器人的俯视图;
图7是根据本发明的一个实施例的辅助进食机器人的勺子舀取食物的示意图;
图8是根据本发明的一个实施例的辅助进食机器人的控制流程图;
图9是根据本发明的一个实施例的辅助进食机器人的控制流程图。
其中,图1至图7中的附图标记与部件名称之间的对应关系为:
10底盘,20碗托,21容纳槽,22电加热装置,31第一电机,40碗体,50机械臂机构,51底座,521第一转动臂,522第二转动臂,53直流电机,60勺子,70检测开关,80感应凸起,91第二电机,101第三电机,111第四电机,112连杆,120舀取开关,130换菜开关。
具体实施方式
为了可以更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
下面参照图1至图9描述根据本发明的一些实施例。
参照图1至图9,本发明的实施例提供了一种辅助进食机器人,包括:底盘10和碗托20,碗托20转动设置在底盘10上,底盘10上设置有用于驱动碗托20转动的第一驱动机构,碗托20上形成有容纳碗体40的容纳槽21,至少一个容纳槽21内设置有电加热装置22,每个电加热装置22对应设置有加热启动开关;用于盛放食物的碗体40,可拆卸设置在容纳槽21内;机械臂机构50,设置在底盘10上,机械臂机构50的末端连接有专用的勺子60;控制器,与第一驱动机构通信连接,控制器用于控制机械臂机构50运动,以使勺子60舀取碗体40内食物。
本方案中,碗体40可以盛放食物,通过控制机械臂运动,能够使勺子60舀取碗体40内的食物,实现辅助进食。同时,由于碗体40可拆卸设置在容纳槽21内,方便对碗体40的清洁,每个电加热装置22对应设置有加热启动开关,能够根据需要对碗体40进行单独加热,易于使用,多个碗体40能够同时盛放不同的食物,便于满足多样化的进食需求。
示例性地,驱动机构可以包括第一电机31,第一电机31可以固定在底盘10上,第一电机31通过传动机构与碗托20连接,以能通过第一电机31带动碗托20转动。
例如,该传动机构可以包括与碗托20注塑在一起的法兰,该法兰与第一电机31的电机轴固定。
或者,该转动结构也可以为齿轮转动机构,由于齿轮传动机构为现有技术,此处不再赘述。
在上述实施例中,优选地,辅助进食机器人还包括:检测开关70,固设于底盘10上;感应凸起80,与容纳槽21一一对应设置,感应凸起80用于在与其对应的容纳槽21转动至预设位置时使检测开关70触发;控制器与检测开关70通信连接,控制器还用于在接收到用于指示碗托20旋转的第一控制指令(例如用户可以按下换菜开关130触发该第一控制指令)的情况下,控制第一驱动机构带动碗托20旋转,并在接收到检测开关70的触发信号的情况下,控制第一驱动机构停止工作。
如此,可以实现换菜,便于用户挑选喜欢的菜品。
示例性地,检测开关70可以为光电门。
可替换地,检测开关70也可以为霍尔开关,相对应地,感应凸起80为永磁体。
在上述任一实施例中,优选地,勺子60与机械臂机构50可拆卸连接。
本方案中,勺子60与机械臂机构50可拆卸连接,便于更换不同尺寸不同种类的勺子60。
例如,机械臂机构50上可以设置直流电机53,直流电机53通过可拆卸的旋转连接件与勺子60连接,旋转连接件与勺子60固定,在需要更换勺子60时,只需将旋转连接件拆下即可。
示例性地,旋转连接件可以与勺子60通过粘接、绑定等方式固定,此处不再赘述。
当然,勺子60也可以直接通过粘接、绑定等方式固定在机械臂机构50的末端。
参照图1和图7,在上述任一实施例中,优选地,控制器被配置为通过以下方式控制机械臂机构50带动勺子60舀取碗体40内的食物:带动勺子60沿第一水平方向运动的过程中先使勺子60伸入碗体40内预设高度,后使勺子60向上运动并脱离碗体40内的食物(即从图7中的B2位置运动至B3位置过程中,先使勺子60伸入碗体40内预设高度,后使勺子60向上运动并脱离碗体40内的食物);带动勺子60沿与第一水平方向相反的第二水平方向运动并保持高度不变(即从图7中的B3位置运动至B4位置),以脱离碗体40。
如此,能够减少掉落在碗体40外的食物,减少浪费。
参照图1和图7,在上述任一实施例中,优选地,控制器还被配置为通过以下方式控制机械臂机构50带动勺子60舀取碗体40内的食物:在带动勺子60沿与第二水平方向运动并保持高度不变(即从图7中的B3位置运动至B4位置)的情况下,在勺子60的底部与碗体40的上边缘接触后(本实例中的向上,即为图1中Z轴的正方向),使勺子60继续沿第二水平方向移动,以使勺子60脱离碗体40。
如此,能够通过碗体40的上边缘剐蹭掉勺子60底部的食物,在舀取流质食物的情景下,能减少由勺子60底部滴落在碗体40外侧的食物,减少食物浪费,同时便于保持洁净。
在上述任一实施例中,优选地,机械臂机构50包括:底座51,转动设置在底盘10上,底盘10上设置有用于驱动底座51转动的第二驱动机构;转动臂机构,与底座51的上侧转动连接,转动臂结构的一端与底座51转动连接,另一端与勺子60连接,底座51上设置有用于驱动转动臂机构转动的第三驱动机构,其中,转动臂机构的转轴与底座51的转轴垂直。
例如,底盘10上可以设置可转动的旋转底盘,底座51固定在旋转底盘上,第二驱动结构可以包括第二电机91,第二电机91可以通过法兰与旋转底盘连接,以使第二电机91能带动底座51绕图1中的Z轴转动。
或者,第二电机91也可以通过齿轮传动机构与旋转底盘连接,由于齿轮传动机构为现有技术,此处不再赘述。
在上述任一实施例中,优选地,转动臂机构包括:第一转动臂521和第二转动臂522,第一转动臂521的两端分别与底座51以及第二转动臂522转动连接,第二转动臂522的两端分别与第一转动臂521以及勺子60连接,第三驱动机构与第一转动臂521连接;辅助进食机器人还包括:第四驱动机构,设置在第一转动臂521上且用于驱动第二转动臂522转动。
示例性地,第三驱动机构可以包括第三电机101,第三电机101固定在底座51上,第三电机101可以与第一转动臂521的转轴固定连接,在第三电机101转动时,能够带动第一转动臂521绕图1中的Y轴转动。
或者,第三电机101也可以通过齿轮转动结构与第一转动臂521的转轴连接,由于齿轮传动机构为现有技术,此处不再赘述。
示例性地,第四驱动结构可以包括第四电机111以及连杆112,连杆112与第二转动臂522连接,连杆112与第二转动臂522的连接位置与第二转动臂522的转轴不重合,第四电机111固定在第一转动臂521上,第四电机111与连杆112连接,第四电机111能够带动连杆112转动,以使连杆112带动第二转动臂522绕图1中的Y轴转动。
或者,也可以将第四电机111替换为拖拉机构,例如可以为电动推杆。
在上述任一实施例中,优选地,第二转动臂522远离第一转动臂521的一端设置有直流电机53,直流电机53通过传动机构与勺子60连接。
示例性地,直流电机53的转轴可以与图1中的X轴平行。如此,直流电机53工作时,勺子60绕图1中的X轴转动。
如此,能够实现勺子60的全自由度控制,控制更加灵活。同时,底盘10、第一转动臂521、第二转动臂522以及勺子60均通过单独的驱动机构驱动,使勺子60的控制更加灵活,柔性更高。勺子60单独通过直流电机53驱动,更加有利于食物的舀取。
其中,传动机构可以为转接件,转接件的一端与勺子60通过粘接、绑定等方式固定,另一端与直流电机53的电机轴固定。
其中,上述实例中的电机可以为步进电机,以能精确控制电机的转动。
在上述任一实施例中,优选地,控制器被配置为通过以下方式控制机械臂机构50带动勺子60舀取碗体40内的食物:根据预设的勺子舀取食物的舀取路径确定多个位置点;确定每个位置点对应的第二驱动机构、第三驱动机构、第四驱动机构以及直流电机53的驱动量(例如,驱动量可以实现根据位置点进行标定);在目标碗体40位于预设位置的情况下,确定当前位置点对应的控制量,并根据控制量控制二驱动机构、第三驱动机构、第四驱动机构以及直流电机53工作;在当前位置点不是最后一个位置点的情况下,确定当前位置点的下一个位置点为当前位置点,并重新执行确定当前位置点对应的控制量,并根据控制量控制二驱动机构、第三驱动机构、第四驱动机构以及直流电机53工作的步骤;在当前位置点是最后一个位置点的情况下,控制第二驱动机构、第三驱动机构、第四驱动机构以及直流电机53停止工作。
例如,在辅助进食时,可以首先确保碗托20带动碗旋转到位(食物到位),流程如下(参照图8):
1)人首先将食物放入碗中;
2)人按下换菜按钮,此时碗托20的第一驱动机构启动;
3)碗托20下方可以安装有压力传感器,会感知到碗体40内是否添加食物,如未添加食物,则提示添加食物(例如4个碗体40中有1个碗体40中有食物就可启动)。如检测到有食物,则第一驱动电机转动,首先将碗托20归零,后提示准备工作完成;
4)用餐人在使用时,可根据自己喜好,按下换菜开关130,将菜品旋转至最远离自己一侧,方便机械臂机构50在远端完成对饭菜的舀取(主要是安全考虑)。在这个过程中会检测碗托20是否旋转到位,如检测开关70(例如为光电传感器)未检测到到位信号,则提示第一电机31继续转动,如转动到指定位置,则进入等待状态,等待进一步指令。
辅助进食的流程如下(参照图9):
1)工人按下取食按钮后,第二电机91、第三电机101和第四电机111依次归零,回到初始位置,此为位置1,其中,图9中的关节1转动指第二电机91能带动底座51绕图1中的Z轴转动,图9中的关节2转动指第三电机101带动第一转动臂521转动,图9中的关节3转动指第四电机111带动连杆112转动,以使连杆112带动第二转动臂522绕图1中的Y轴转动,图9中的勺子60转动指直流电机53带动勺子60绕图1中的X轴转动。
2)机械臂机构50到达位置1后,马上开始动作,移动到碗上方,使得勺子60刚好在碗的范围内,此为位置2(机械臂机构50连续动作时,每次到达位置2的位置都会有细微变动,方便能更多的舀取非流质食物);
3)勺子60转动到指定位置;
4)机械臂机构50转动配合勺子60的转动,完成勺子60末端在碗中的运动(例如为沿图7中的弧线运动),并停留在弧线末端,此为位置3;
5)机械臂机构50带动勺子60,沿着弧线的的反方向运动,保证勺子60不会再次触碰食物,且刚好勺子60底部从碗沿上擦过,该动作可以防止舀取流质食物后有液体滴落的现象发生,当勺子60完全离开碗的范围后停止(例如为从图7中的B3点运动至B4点),此为位置4;
6)到达位置4后,机械臂按照既定程序将勺子60提升至指定位置并停止,等待用餐人员用餐,此为位置5;
7)用餐完成后,用餐人继续按下换菜开关130或者舀菜开关120,继续按以上说明流程工作。
在本发明中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能辅助进食护理系统及其辅助进食方法
- 一种辅助进食机器人