纠偏装置、光伏板清扫机器人及清洁方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及纠偏设备的技术领域,特别是涉及一种纠偏装置、光伏板清扫机器人及清洁方法。
背景技术
目前,由于光伏发电厂多数建在山坡位置,道路不平,因此光伏清扫机器人在清扫作业时可能发生位置偏移,很难保证清扫机器人与光伏板的距离恒定不变,若清扫机器人向光伏板方向偏移,很容易撞到光伏板,若清扫机器人向远离光伏板的方向偏移,清扫机器人容易拖走光伏板,或无法清扫光伏板。
现有防止清扫机器人位置偏移技术中,一种是在光伏板边框上加装一条双轨轨道,且需每一行光伏板都需再加装一个机器人,资源利用率较低。另一种是机器人用机械臂携一条长刷进行清扫,但由于光伏板前通道凸凹不平,该机器人与光伏板的距离没有可靠的定位及控制方法,因此清扫效果较差且机械臂极易损伤光伏板。
发明内容
本发明的目的是:克服现有技术缺陷,设计一种纠正偏转方向的装置。
为了实现上述目的,本发明提供了一种纠偏装置,包括控制器、转轴、凸轮、检测件和接触支架,所述凸轮固定连接于所述转轴,所述接触支架包括第一端和第二端,所述第一端固定连接于所述转轴,所述检测件安装于所述凸轮的外周方向,用于检测所述凸轮对应所述检测件的外端面与所述凸轮的轴线之间的距离并产生相应的位置信息,所述控制器与所述检测件电连接。
作为优选方案,还包括弹性件,所述弹性件的一端连接于所述接触支架。
作为优选方案,所述凸轮包括第一凸板、第二凸板和第三凸板,所述检测件包括第一检测开关、第二检测开关和第三检测开关,所述第一检测开关设于所述第一凸板的外周方向,所述第二检测开关设于所述第二凸板的外周方向,所述第三检测开关设于所述第三凸板的外周方向。
作为优选方案,所述接触支架包括抵接段、过渡段和悬挂段,所述抵接段和悬挂段通过所述过渡段连接。
作为优选方案,第二端设于所述抵接段,所述悬挂段与所述弹性件的一端连接。
为了实现上述目的,本发明提供了一种光伏板清扫机器人,包括移动机构、拖动机构和上述的纠偏装置,所述拖动机构搭接于光伏板上,所述移动机构通过柔性连接件与所述拖动机构连接,所述转轴转动连接于所述移动机构的车架上,所述接触支架的第二端抵接于光伏板边缘,所述弹性件的另一端连接于所述车架上,所述检测件安装于所述车架上,所述控制器与所述移动机构电连接。
作为优选方案,所述弹性件拉伸连接于所述接触支架和车架。
作为优选方案,所述第二端设于所述拖动机构的移动方向的前方。
为了实现上述目的,本发明提供了一种纠偏方法,基于上述的光伏板清扫机器人,所述方法包括以下步骤:
S1、将拖动机构搭接在光伏板上,放置移动机构于地面且与光伏板之间形成预设距离,将接触支架呈一定角度抵接在光伏板的边缘;
S2、启动光伏板清扫机器人;
S3、凸轮触发检测件产生相应的位置信息;
S4、控制器获取所述位置信息并控制所述移动机构移动;
其中,所述位置信息为凸轮对应检测件的外端面与凸轮轴线之间的距离。
作为优选方案,步骤S3中,若移动机构未偏离光伏板,所述凸轮的第二凸板触发所述检测件的第二检测开关产生第二位置信息;
若移动机构向靠近光伏板的方向偏离,所述接触支架逆时针旋转一定角度,使所述凸轮的第一凸板触发所述检测件的第一检测开关产生第一位置信息,控制器获取所述第一位置信息并控制移动机构向与偏离方向相反的反向移动;
若移动机构向远离光伏板的方向偏离,所述接触支架脱离光伏板的边缘,在弹性件的作用下,所述接触支架顺时针旋转一定角度,使所述凸轮的第三凸板触发所述检测件的第三检测开关产生第三位置信息,控制器获取所述第三位置信息并控制移动机构向与偏离方向相反的反向移动。
本发明实施例与现有技术相比,其有益效果在于:
1、本发明实施例的纠偏装置,通过接触支架转动带动凸轮转动,检测件通过检测凸轮对应检测件的外端面与凸轮轴线之间的距离并产生相应的位置信息发送至控制器,控制器获取位置信息,控制凸轮对应检测件的外端面与凸轮轴线的距离在预设距离内。
2、本发明实施例的光伏板清扫机器人及清洁方法,包括拖动机构和移动机构,拖动机构搭接在光伏板上,通过移动机构拉动从而清扫光伏板,且移动机构上设有纠偏装置,由纠偏装置的接触支架转动带动凸轮转动,检测件通过检测凸轮对应检测件的外端面与凸轮轴线之间的距离并产生相应的位置信息发送至控制器,控制器获取位置信息,从而控制移动机构回到原始运动的轨迹,使凸轮对应检测件的外端面与凸轮轴线的距离在预设距离内,从而保持移动机构与光伏板的距离不变,防止移动机构撞到光伏板,或拖走光伏板和拖动机构,亦或使拖动机构与移动机构的柔性连接件断裂,无法清扫光伏板,结构简单,操作方便,无需额外增加轨道,提高资源利用率,清洁效果好,对光伏板没有损伤。
附图说明
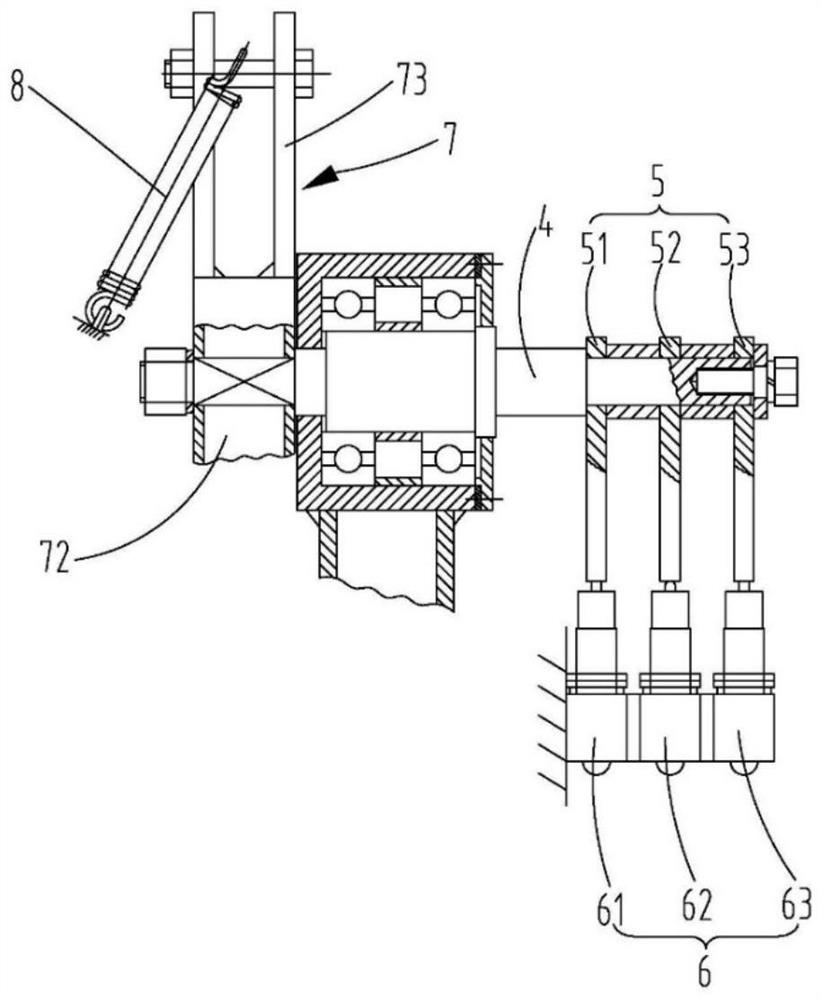
图1是本发明实施例的纠偏装置结构示意图;
图2是本发明实施例的光伏板清扫机器人结构示意图;
图3是本发明实施例的光伏板清扫机器人仰视图;
图4是图1的A部放大图;
图5是本发明纠偏装置在移动机构未偏离时的状态图;
图6是本发明纠偏装置在移动机构向靠近光伏板偏离时的状态图;
图7是本发明纠偏装置在移动机构向远离光伏板偏离时的状态图。
图中:
1、拖动机构;2、移动机构;3、光伏板;4、转轴;5、凸轮;51、第一凸板;52、第二凸板;53、第三凸板;6、检测件;61、第一检测开关;62、第二检测开关;63、第三检测开关;7、接触支架;71、抵接段;72、过渡段;73、悬挂段;8、弹性件。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,应当理解的是,本发明中采用术语“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。本发明中采用术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,应当理解的是,本发明中采用术语“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是焊接连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1至图3所示,本发明实施例优选实施例的一种纠偏装置,包括控制器、转轴4、凸轮5、检测件6和接触支架7,凸轮5固定连接于转轴4,接触支架7包括第一端和第二端,所述第一端固定连接于所述转轴4,检测件6安装于凸轮5的外周方向,用于检测凸轮5对应检测件6的外端面与凸轮5的轴线之间的距离并产生相应的位置信息,控制器与检测件6电连接。
本发明通过接触支架7转动带动凸轮5转动,检测件6通过检测凸轮5对应检测件6的外端面与凸轮5的轴线之间的距离并产生相应的位置信息发送至控制器,控制器获取位置信息,控制凸轮5对应检测件6的外端面与凸轮5的轴线的距离在预设距离内。本发明中凸轮5转动的方式和接触支架7的设置方式不局限于上述方式,任何通过使凸轮5转动从而触发检测件6产生位置信息以及改变接触支架7安装位置但实现原理相似的实施方式均为本发明的保护范围。
进一步的,还包括弹性件8,弹性件8的一端连接于接触支架7。具体的,弹性件8为弹簧,当纠偏装置具体应用在需要纠正移动方向的场合时,将弹性件8的另一端连接于应用产品上,使弹性件8处于拉伸状态,在应用产品偏离规定的移动方向时,弹性件8可带动接触支架7转动,使凸轮5转动,检测件6通过检测凸轮5对应检测件6的外端面与凸轮5的轴线之间的距离并产生相应的位置信息发送至控制器。
进一步的,如图1和图4所示,凸轮5包括第一凸板51、第二凸板52和第三凸板53,检测件6包括第一检测开关61、第二检测开关62和第三检测开关63,第一检测开关61设于第一凸板51的外周方向,第二检测开关62设于第二凸板52的外周方向,第三检测开关63设于第三凸板53的外周方向。当在原始方向上移动时,第二凸板52触发第二检测开关62;当向原始移动方向的左侧偏离时,第一凸板51触发第一检测开关61;当向原始移动方向的右侧偏离时,第三凸板53触发第三检测开关63;通过第一凸板51、第二凸板52和第三凸板53触发第一检测开关61、第二检测开关62和第三检测开关63,从而判断是否偏离和偏离方向,并控制移动方向。此外,凸轮5的数量可以为一个及以上,检测件6可以为其它触发电器,与凸轮5配合完成位置检测。
进一步的,如图2和图3所示,接触支架7包括抵接段71、过渡段72和悬挂段73,抵接段71和悬挂段73通过过渡段72连接,第二端设于所述抵接段71,悬挂段73与弹性件8的一端连接。抵接段71和过渡段72为圆柱体,有助于接触支架7转动,悬挂段73呈弯钩状,悬挂段73连接弹性件8,发生偏离时,弹性件8拉动接触支架7,从而带动转轴4转动,使凸轮5触发检测件6,纠正移动方向。
如图2至图4所示,本发明实施例优选实施例的一种光伏板清扫机器人,包括移动机构2、拖动机构1和上述的纠偏装置,所述拖动机构1搭接于光伏板3上,所述移动机构2通过柔性连接件与所述拖动机构1连接,所述转轴4转动连接于所述移动机构2的车架上,所述接触支架7的第二端抵接于光伏板3边缘,所述弹性件8的另一端连接于所述车架上,所述检测件6安装于所述车架上,所述控制器与所述移动机构2电连接。具体的,柔性连接件为钢链。
本发明通过将拖动机构1搭接在光伏板3上,通过移动机构2拉动拖动机构1,从而清扫光伏板3,且在移动机构2上设有纠偏装置,在移动机构2发生偏移时,接触支架7随着移动机构2偏移发生转动,从而带动凸轮5转动并触发检测件6,进而控制移动机构2回到原始行驶方向,确保移动机构2与光伏板3保持距离不变,以免移动机构2撞到光伏板3,或拖走光伏板3和拖动机构1,亦或拉断与拖动机构1的柔性连接件,结构简单,操作方便,无需额外增加轨道,提高资源利用率,清洁效果好,对光伏板3没有损伤。若移动机构两侧均有光伏板3,可在移动机构2上设有两组纠偏装置。
进一步的,如图2和图4所示,弹性件8拉伸连接于接触支架7和车架,并且通过接触支架7与光伏板3之间的接触摩擦力使弹性件8保持拉伸状态,当移动机构2向远离光伏板3的方向偏离时,接触支架7脱离了光伏板3边缘,接触支架7在弹性件8的作用下发生转动,从而带动转轴4转动,使第三凸板53触发第三检测开关63。
进一步的,接触支架7的第二端设于清扫刷1的移动方向的前方,防止接触支架7在清扫刷工作时与其发生碰撞,影响清扫工作,也防止接触支架7与清扫刷1和移动机构2之间的柔性连接件发生碰撞,导致凸轮5触发检测件6,从而使移动机构2移动方向偏离。
如图5至图7所示,本发明实施例优选实施例的一种光伏板清洁方法,基于上述的光伏板清扫机器人,所述方法包括以下步骤:
S1、将拖动机构1搭接在光伏板3上,放置移动机构2于地面且与光伏板3之间形成预设距离,将接触支架7呈一定角度抵接在光伏板3的边缘;
S2、启动光伏板清扫机器人;
S3、凸轮5触发检测件6产生相应的位置信息;
S4、控制器获取位置信息并控制移动机构2移动。
其中,所述位置信息为凸轮5对应检测件6的外端面与凸轮轴线之间的距离。
具体的,步骤S3中,若移动机构2未偏离光伏板3,凸轮5的第二凸板52触发检测件6的第二检测开关62产生第二位置信息;
若移动机构2向靠近光伏板3的方向偏离,接触支架7逆时针旋转一定角度,使凸轮5的第一凸板51触发检测件6的第一检测开关61产生第一位置信息,控制器获取所述第一位置信息并控制移动机构2向与偏离方向相反的方向移动;
若移动机构2向远离光伏板3的方向偏离,接触支架7脱离光伏板3的边缘,在弹性件8的作用下,接触支架7顺时针旋转一定角度,使凸轮5的第三凸板53触发所述检测件的第三检测开关63产生第三位置信息,控制器获取所述第三位置信息并控制移动机构2向与偏离方向相反的方向移动。
上述方法通过获取第一凸板51、第二凸板52和第三凸板53触发第一检测开关61、第二检测开关62和第三检测开关63的位置信息,从而判断移动机构2的移动方向,在移动机构2发生偏离时,通过控制移动机构2向与偏离方向相反的方向移动,直至检测到移动机构2回到原始移动方向,无需人工纠正移动机构方向,保证了移动机构2与光伏板3的距离保持不变。
综上,本发明实施例提供一种纠偏装置、光伏板清扫机器人及清洁方法,通过接触支架转动带动凸轮转动,检测件通过检测凸轮对应检测件的外端面与凸轮轴线之间的距离并产生相应的位置信息发送至控制器,控制器获取位置信息,控制凸轮对应检测件的外端面与凸轮轴线的距离在预设距离内。将拖动机构搭接在光伏板上,移动机构拉动拖动机构,从而清扫光伏板,且在移动机构上设有纠偏装置,通过第一凸板、第二凸板和第三凸板触发第一检测开关、第二检测开关和第三检测开关,从而判断移动机构的移动方向,在移动机构发生偏离时,通过控制移动机构向与偏离方向相反的方向移动,直至检测到移动机构回到原始移动方向,确保移动机构与光伏板保持距离不变,以免移动机构撞到光伏板,或拖走光伏板和拖动机构,亦或拉断与拖动机构的柔性连接件,结构简单,操作方便,无需额外增加轨道,提高资源利用率,清洁效果好,对光伏板没有损伤。
以上光伏板清扫机器人仅为本发明的优选实施方式,任何需要一个运动单元相对于固定单元保持一定距离所采取的测距方式、方法均为本发明的实施方式。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 纠偏装置、光伏板清扫机器人及清洁方法
- 一种用于光伏板清扫机器人的光伏板搭接装置