一种基于高斯聚类的超声波雷达在环自动驾驶测试方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及自动驾驶汽车在环测试方法领域,具体涉及一种基于高斯聚类的超声波雷达在环自动驾驶测试方法。
背景技术
自动驾驶技术中自动泊车是不可分割的一环,现在市面上的自动泊车系统大多涉及超声波雷达传感器。如何可靠的测试自动驾驶汽车控制算法的可靠性成为比较重要的问题。传统的场地测试局限性较大,采用合适的仿真方法来对车辆进行测试成为了待解决的问题。
超声波雷达利用超声波测距原理,固定在车身上的超声波雷达在汽车自动泊车时向周围发出超声波信号,并且在遇到障碍物时接收反射回来的回波信号从而得到障碍物的具体位置,以生成泊车路径,使得与障碍物之间的距离小于规定距离,从而实现规避障碍物,安全泊车。
传统的场地测试方法需要人工建立各个场景,消耗的人力、物力较大,容易造成资源浪费,测试效率低下。而且由于无法脱离人的因素,测试时存在较大的安全隐患。虚拟场景测试能够很好的规避这些缺陷,但是缺少真实传感器,忽略了传感器本身的误差,不易得到更加精确的测试结果。
现存的一些硬件在环测试存在着场景确定过于复杂、易造成重复测试等问题,不够便捷与准确,如何更加便捷、高效、准确的得到测试数据以提高真实性与可信度成为待解决的问题。
发明内容
本发明提供了一种基于高斯聚类的超声波雷达在环自动驾驶测试方法以实现对于自动驾驶汽车自动泊车控制算法的测试,既克服了人工测试的效率低下与安全问题,还解决了虚拟测试对于传感器本身的忽视,能够得到更加精准的测试结果。同时优化了测试时危险场景的确定方法,有利于得到算法在最危险工况下的实际工作情况,从而提高测试的便捷性与可靠性。
本发明是通过如下技术方案实现的:
一种基于高斯聚类的超声波雷达在环自动驾驶测试方法,使用一种硬件在环自动驾驶测试设备,包括CAN总线、电脑、超声波雷达传感器、超声波回波模拟器、快速控制原型;CAN总线用于传递数据连接测试平台各装置;电脑用于运行生成危险场景的软件Prescan;超声波雷达传感器用于发出、接收超声波信号;超声波回波模拟器用于模拟超声波雷达发出的超声波遇到障碍物时反射回来的回波信号;快速控制原型主要用于融入车辆的控制算法,对于超声波雷达接收的信号进行处理转换为车辆运行的速度与距离信息,对于车辆进行控制并将更新后的车辆位置、速度状态传回回波模拟器,从而形成闭环;本方法步骤如下:
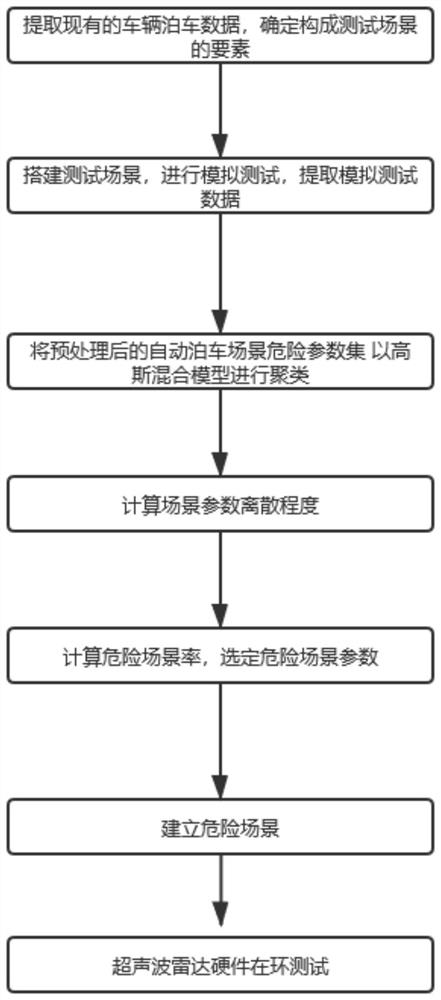
步骤一:提取现有的车辆泊车数据,确定构成测试场景的要素
将本车速度、环境温度和相对距离作为构成自动泊车测试场景的基本要素:
本车速度指的是汽车泊车时车辆相对于地面运动的平均速度;
环境温度指的是泊车场景的环境温度;
相对距离指的是汽车泊车起始位置与车位的相对距离;
泊车情况分为三种:平行泊车、垂直泊车、和斜向泊车;
平行泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终平行停到车位内;
垂直泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终垂直停到车位内;
斜向泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终斜向停到车位内;
在泊车时,会出现突发现象:有人员、车辆或者动物突然闯入预规划路径、泊车车位周围障碍物由静止突然移动的情况;
人员、车辆或者动物突然闯入预规划路径指的是在在自动泊车控制算法已经规划完毕的泊车线路上突然有人员、车辆、动物的闯入,导致出现无法完成安全泊车的情况;
泊车车位周围障碍物由静止突然移动指的是环绕车位的车辆、标志筒、护栏在车辆泊车时由原来相对于车位静止突然变为相对于车位的移动,根据超声波雷达的探测机理,测距是通过障碍物反射超声波来探测距离的,因此,在自动泊车过程进行时,车位周围的障碍物如果移动将有可能导致测距不准或者无法测距,因此考虑周围障碍物移动的情况,采用周围障碍物相对车位的位置作为考量周围障碍物是否相对于车位发生了移动的参数;
综上,组成自动泊车测试场景的要素就有:车辆的平均速度v、场景的环境温度t、车辆起始位置距车位距离s、泊车方式以及车位周围障碍物相对于车位的位置;
步骤二:搭建测试场景,进行模拟测试,提取模拟测试数据
首先对超声波雷达硬件在环测试场景要素的参数进行离散化处理,由于温度每升高1K,声速改变0.17%,所以影响超声波雷达精度的主要因素为环境温度,由于现在市场上大多数的超声波雷达传感器都有一定的温度补偿功能,为了使环境温度的影响更加的明显,选取3K为步长,从243K-313K每3K设定一个环境温度,并在此环境温度下输入其他的场景参数,这样就使得测试数据得以离散,不会出现连续的测试数据导致处理困难;
将步骤一中确定的测试场景的要素的参数数据提取输入Prescan,车辆的平均速度v在Prescan中的车辆模型参数里进行设置;场景的环境温度t在Prescan中的“天气”里设置;车辆起始位置距离车位的距离s在Prescan编辑界面内通过距离设定功能来设置;泊车方式通过Prescan中已有的泊车方式模型来搭建;车位周围障碍物及其在车辆泊车过程中是否相对车位位置发生了运动的情况通过在Prescan加入人员、车辆或者动物并且设定其位移、速度、加速度曲线来设置;如上所述建立测试场景,在Prescan中开启“Simulink”,从Simulink界面里输入待测车辆的自动泊车控制算法,然后在Prescan中的车辆模型设置界面中输入待测车辆的车辆动力学模型参数,包括:尺寸参数轮距、轴距;车辆质量;车辆悬架弹簧刚度特性;车辆传动系参数;车辆所处坐标平面为Prescan编辑界面自带坐标平面;
设定上述参数后,在Prescan中开启模拟测试;测试p次,测试项目为m项,测试项目根据中国智能网联汽车产业创新联盟和全国汽标委智能网联汽车分技术委员会于2018年联合发布的《智能网联汽车自动驾驶功能测试规程(试行)》来确定,得到一个p×m的测试数据矩阵T=(t
以车辆在泊车过程中是否发生碰撞为评判标准,发生碰撞即为发生事故,将发生事故时的工况找出,提取发生事故时的被测车辆所处的测试场景的场景参数测试数据,将其定义为危险参数集,用矩阵T'表示,有n次测试发生了事故,测试项目为m项,将其记作T'=(t'
由于矩阵Z=(z
计算均值z
计算标准差
式中:x
Z
S
j为矩阵Z的第j列,j=1,2,…,m;m为测试项目的数目,也是矩阵Z的总列数
得到预处理后的自动泊车场景危险参数集X:
X=[x
其中的每一行向量x
步骤三:将预处理后的自动泊车场景危险参数集X以高斯混合模型进行聚类
根据步骤二中得出的预处理后的自动泊车场景危险参数集X计算组内残差平方和:
式中x'为随机选择的聚类中心;
确定聚类中心数目,组内残差平方和变化速率的拐点数l即为聚类中心的数目;
如果聚类中心数目l为1,直接对危险参数进行单高斯模型聚类:
当聚类中心数目大于1时,应用EM算法对预处理后的危险参数集X里面的危险参数进行高斯混合模型聚类,将预处理后的危险参数集X里的危险参数分解成多个高斯概率密度函数组成的模型:
θ是高斯混合模型的参数,包括的k个高斯模型的权重α
通过极大似然法可对θ进行估计:
θ
应用EM迭代算法对上述式子进行求解:
E-step:计算Q函数,Q函数代表给定p轮迭代的参数θ
式中,γ
M-step:最大化Q函数,当计算第(p+1)步的参数θ
重复进行EM算法的E-step和M-step直至模型收敛即可得到高斯混合模型G(x|θ);
通过上述高斯混合模型,得到标准差σ
步骤四:计算场景参数离散程度
场景参数的离散程度表征了场景危险程度,被测危险参数分布越离散,表征该参数下的场景越危险,因此需根据步骤三所得的高斯混合模型计算场景参数的离散度;
定义第k个高斯模型的离散度d
式中:μ
用熵值法计算权重系数,由于熵值法计算采用的是各个方案某一指标占同一指标综合的比值,因此不存在量纲的影响,不需要标准化处理,若数据中有负数,就需要对数据进行非负化处理,此外,为了避免求熵值时,对数的无意义,需要进行数据平移,对于预处理后的危险参数集X,处理后得到的矩阵为R,处理过程如下所示:
对于越大越好的指标:
对于越小越好的指标:
由此将场景测试数据矩阵转化为标准化场景测试数据矩阵R=(r
计算评价指标的熵:
对于n次测试,m项测试指标,第i个测试指标的熵定义为:
式中M=(ln n)
并假定,当f
由于0≤f
在求出测试指标的熵后,求测试指标的熵权,第i个指标的熵权ω
熵权ω
将熵权带入离散度计算式中,由此得到离散度d
定义衡量危险参数覆盖范围的指标为危险域范围,将第k个危险域范围记作s
步骤五:计算危险场景率,选定危险场景参数
由于影响一个场景的危险程度主要由危险域离散程度和危险域范围来表征,但是单单从这两个数据无法更加直观的表征出场景的危险程度,因此,定义危险场景率R
危险场景率R
式中:s
s
危险场景率R
步骤六:建立危险场景
提取R
步骤七:超声波雷达硬件在环测试
基于上述危险场景强化生成方法及自动泊车安全性聚类评价指标,利用Prescan搭建超声波雷达工作时的虚拟危险场景;建立超声波回波模拟器,选取合适的硬件组成回波模拟装置,用以实现目标回波信号的模拟;建立超声波暗室,周围采用吸波材料,防止周围的障碍物对于测试结果产生较大的影响;超声波暗室中置有超声波雷达和雷达转台,雷达转台通过Labview软件进行控制,可以旋转雷达,改变目标的方位角;建立超声波雷达信号收发器,可以采集超声波信号,将采集的超声波信号转化为电信号发送到超声波回波模拟器;基于电信号,通过模拟超声波传感器实现与ECU通信,实现超声波传感器的模拟;将超声波传感器注入,超声波回波模拟器接收超声波传感器所发出的信号,根据车辆动力学模型产生的已有障碍物距离和车辆速度信息加入可控制的时间延迟,再将其发射出去,超声波雷达接收到回波信号后根据发射信号与收到信号的时间差t,计算出超声波探头与障碍物之间的距离s:
式中:s为所测距离,单位为m;
t为超声波雷达发射信号与收到信号的时间差,单位为s;
v
由于在超声波暗室中,温度的变化较为难以用装置来模拟,因此采用公式根据所搭设场景中的温度信息对超声波的传播速度进行补偿:
v
式中:T为场景中的空气温度,单位为℃;由此实现对超声波探测距离的模拟;通过模拟12路超声波的收发信号,实现距离仿真和数据通信;建立快速控制原型系统,快速控制原型系统选用NI公司的PXIe-8880板卡和PXIe-8513板卡,PXIe-8880板卡用于运行雷达目标筛选程序、AEB等ADAS系统程序和Carsim汽车动力学模型,PXIe-8513板卡为CAN卡,用于数据传输的各个模块之间均利用CAN总线连接,形成测试环路;超声波雷达硬件在环测试过程可在显示屏上进行可视化体现;
根据上述步骤进行超声波雷达硬件在环测试,获取测试结果。
与现有技术相比本实用新型的有益效果是:
本方法因为采用高斯聚类来确定场景的危险指标,从而建立自动泊车的危险场景,所以减少了测试的数量,较好的解决了了测试冗余、测试进程缓慢的问题;由于测试过程中引入了真实的超声波雷达,相对于模拟测试具有更高的精度,同时又很好的解决了传统场地测试无法可靠的评判自动泊车算法是否安全的问题。
附图说明
下面结合附图对本发明作进一步的说明:
图1为本发明所述的一种基于高斯聚类的超声波雷达在环自动驾驶测试方法的流程简图;
图2为实际生活中的主要三种泊车情形;
图3为本方法中危险参数预处理的流程图;
图4为本方法中危险参数聚类的流程图;
具体实施方式
下面结合附图对本发明作详细的描述:
本发明提供了一种基于高斯聚类的超声波雷达在环自动驾驶测试方法,使用一种硬件在环自动驾驶测试设备,包括CAN总线、电脑、超声波雷达传感器、超声波回波模拟器、快速控制原型;CAN总线用于传递数据连接测试平台各装置;电脑用于运行生成危险场景的软件Prescan;超声波雷达传感器用于发出、接收超声波信号;超声波回波模拟器用于模拟超声波雷达发出的超声波遇到障碍物时反射回来的回波信号;快速控制原型主要用于融入车辆的控制算法,对于超声波雷达接收的信号进行处理转换为车辆运行的速度与距离信息,对于车辆进行控制并将更新后的车辆位置、速度状态传回回波模拟器,从而形成闭环;本方法步骤如下:
步骤一:提取现有的车辆泊车数据,确定构成测试场景的要素
将本车速度、环境温度和相对距离作为构成自动泊车测试场景的基本要素:
本车速度指的是汽车泊车时车辆相对于地面运动的平均速度;
环境温度指的是泊车场景的环境温度;
相对距离指的是汽车泊车起始位置与车位的相对距离;
泊车情况分为三种:平行泊车、垂直泊车、和斜向泊车;如图2所示
平行泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终平行停到车位内;
垂直泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终垂直停到车位内;
斜向泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终斜向停到车位内;
在泊车时,会出现突发现象:有人员、车辆或者动物突然闯入预规划路径、泊车车位周围障碍物由静止突然移动的情况;
人员、车辆或者动物突然闯入预规划路径指的是在在自动泊车控制算法已经规划完毕的泊车线路上突然有人员、车辆、动物的闯入,导致出现无法完成安全泊车的情况;
泊车车位周围障碍物由静止突然移动指的是环绕车位的车辆、标志筒、护栏在车辆泊车时由原来相对于车位静止突然变为相对于车位的移动,根据超声波雷达的探测机理,测距是通过障碍物反射超声波来探测距离的,因此,在自动泊车过程进行时,车位周围的障碍物如果移动将有可能导致测距不准或者无法测距,因此考虑周围障碍物移动的情况,采用周围障碍物相对车位的位置作为考量周围障碍物是否相对于车位发生了移动的参数;
综上,组成自动泊车测试场景的要素就有:车辆的平均速度v、场景的环境温度t、车辆起始位置距车位距离s、泊车方式以及车位周围障碍物相对于车位的位置;
步骤二:搭建测试场景,进行模拟测试,提取模拟测试数据
首先对超声波雷达硬件在环测试场景要素的参数进行离散化处理,由于温度每升高1K,声速改变0.17%,所以影响超声波雷达精度的主要因素为环境温度,由于现在市场上大多数的超声波雷达传感器都有一定的温度补偿功能,为了使环境温度的影响更加的明显,选取3K为步长,从243K-313K每3K设定一个环境温度,并在此环境温度下输入其他的场景参数,这样就使得测试数据得以离散,不会出现连续的测试数据导致处理困难;
将步骤一中确定的测试场景的要素的参数数据提取输入Prescan,车辆的平均速度v在Prescan中的车辆模型参数里进行设置;场景的环境温度t在Prescan中的“天气”里设置;车辆起始位置距离车位的距离s在Prescan编辑界面内通过距离设定功能来设置;泊车方式通过Prescan中已有的泊车方式模型来搭建;车位周围障碍物及其在车辆泊车过程中是否相对车位位置发生了运动的情况通过在Prescan加入人员、车辆或者动物并且设定其位移、速度、加速度曲线来设置;如上所述建立测试场景,在Prescan中开启“Simulink”,从Simulink界面里输入待测车辆的自动泊车控制算法,然后在Prescan中的车辆模型设置界面中输入待测车辆的车辆动力学模型参数,包括:尺寸参数轮距、轴距;车辆质量;车辆悬架弹簧刚度特性;车辆传动系参数;车辆所处坐标平面为Prescan编辑界面自带坐标平面;
设定上述参数后,在Prescan中开启模拟测试;测试p次,测试项目为m项,测试项目根据中国智能网联汽车产业创新联盟和全国汽标委智能网联汽车分技术委员会于2018年联合发布的《智能网联汽车自动驾驶功能测试规程(试行)》来确定,得到一个p×m的测试数据矩阵T=(t
以车辆在泊车过程中是否发生碰撞为评判标准,发生碰撞即为发生事故,将发生事故时的工况找出,提取发生事故时的被测车辆所处的测试场景的场景参数测试数据,将其定义为危险参数集,用矩阵T'表示,有n次测试发生了事故,测试项目为m项,将其记作T'=(t'
由于矩阵Z=(z
计算均值z
计算标准差
式中:x
Z
S
j为矩阵Z的第j列,j=1,2,…,m;m为测试项目的数目,也是矩阵Z的总列数
得到预处理后的自动泊车场景危险参数集X:
X=[x
其中的每一行向量x
步骤三:将预处理后的自动泊车场景危险参数集X以高斯混合模型进行聚类
根据步骤二中得出的预处理后的自动泊车场景危险参数集X计算组内残差平方和:
式中x'为随机选择的聚类中心;
确定聚类中心数目,组内残差平方和变化速率的拐点数l即为聚类中心的数目;
如果聚类中心数目l为1,直接对危险参数进行单高斯模型聚类:
当聚类中心数目大于1时,应用EM算法对预处理后的危险参数集X里面的危险参数进行高斯混合模型聚类,将预处理后的危险参数集X里的危险参数分解成多个高斯概率密度函数组成的模型:
θ是高斯混合模型的参数,包括的k个高斯模型的权重α
通过极大似然法可对θ进行估计:
θ
应用EM迭代算法对上述式子进行求解:
E-step:计算Q函数,Q函数代表给定p轮迭代的参数θ
式中,γ
M-step:最大化Q函数,当计算第(p+1)步的参数θ
重复进行EM算法的E-step和M-step直至模型收敛即可得到高斯混合模型G(x|θ);
通过上述高斯混合模型,得到标准差σ
步骤四:计算场景参数离散程度
场景参数的离散程度表征了场景危险程度,被测危险参数分布越离散,表征该参数下的场景越危险,因此需根据步骤三所得的高斯混合模型计算场景参数的离散度;
定义第k个高斯模型的离散度d
式中:μ
用熵值法计算权重系数,由于熵值法计算采用的是各个方案某一指标占同一指标综合的比值,因此不存在量纲的影响,不需要标准化处理,若数据中有负数,就需要对数据进行非负化处理,此外,为了避免求熵值时,对数的无意义,需要进行数据平移,对于预处理后的危险参数集X,处理后得到的矩阵为R,处理过程如下所示:
对于越大越好的指标:
对于越小越好的指标:
由此将场景测试数据矩阵转化为标准化场景测试数据矩阵R=(r
计算评价指标的熵:
对于n次测试,m项测试指标,第i个测试指标的熵定义为:
式中M=(ln n)
并假定,当f
由于0≤f
在求出测试指标的熵后,求测试指标的熵权,第i个指标的熵权ω
熵权ω
将熵权带入离散度计算式中,由此得到离散度d
定义衡量危险参数覆盖范围的指标为危险域范围,将第k个危险域范围记作s
步骤五:计算危险场景率,选定危险场景参数
由于影响一个场景的危险程度主要由危险域离散程度和危险域范围来表征,但是单单从这两个数据无法更加直观的表征出场景的危险程度,因此,定义危险场景率R
危险场景率R
式中s
s
危险场景率R
步骤六:建立危险场景
提取R
步骤七:超声波雷达硬件在环测试
基于上述危险场景强化生成方法及自动泊车安全性聚类评价指标,利用Prescan搭建超声波雷达工作时的虚拟危险场景;建立超声波回波模拟器,选取合适的硬件组成回波模拟装置,用以实现目标回波信号的模拟;建立超声波暗室,周围采用吸波材料,防止周围的障碍物对于测试结果产生较大的影响;超声波暗室中置有超声波雷达和雷达转台,雷达转台通过Labview软件进行控制,可以旋转雷达,改变目标的方位角;建立超声波雷达信号收发器,可以采集超声波信号,将采集的超声波信号转化为电信号发送到超声波回波模拟器;基于电信号,通过模拟超声波传感器实现与ECU通信,实现超声波传感器的模拟;将超声波传感器注入,超声波回波模拟器接收超声波传感器所发出的信号,根据车辆动力学模型产生的已有障碍物距离和车辆速度信息加入可控制的时间延迟,再将其发射出去,超声波雷达接收到回波信号后根据发射信号与收到信号的时间差t,计算出超声波探头与障碍物之间的距离s:
式中s为所测距离,单位为m;
t为超声波雷达发射信号与收到信号的时间差,单位为s;
v
由于在超声波暗室中,温度的变化较为难以用装置来模拟,因此采用公式根据所搭设场景中的温度信息对超声波的传播速度进行补偿:
v
式中:T为场景中的空气温度,单位为℃;由此实现对超声波探测距离的模拟;通过模拟12路超声波的收发信号,实现距离仿真和数据通信;建立快速控制原型系统,快速控制原型系统选用NI公司的PXIe-8880板卡和PXIe-8513板卡,PXIe-8880板卡用于运行雷达目标筛选程序、AEB等ADAS系统程序和Carsim汽车动力学模型,PXIe-8513板卡为CAN卡,用于数据传输的各个模块之间均利用CAN总线连接,形成测试环路;超声波雷达硬件在环测试过程可在显示屏上进行可视化体现;
根据上述步骤进行超声波雷达硬件在环测试,获取测试结果。
- 一种基于高斯聚类的超声波雷达在环自动驾驶测试方法
- 一种基于高斯均值超矢量与谱聚类的录音设备聚类方法