一种智能拦截路障系统
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及公路车辆拦截领域,具体涉及一种智能拦截路障系统。
背景技术
高速公路,简称高速路,是指专供汽车高速行驶的公路,高速公路在不同国家地区、不同时代和不同的科研学术领域有不同规定,根据中国《公路工程技术标准》(JTG B01-2014)规定:高速公路为专供汽车分向行驶、分车道行驶,全部控制出入的多车道公路,高速公路年平均日设计交通量宜在15000辆小客车以上,设计速度每小时80至120千米,高速公路行车速度快且不间断,相比普通公路,车辆每千米油耗和运费可分别降低。
现有技术存在以下不足:现有的高速公路目前常见的车辆拦截方法是开车布放路锥,导致高速的车流时刻危及人车安全,摆放效率不高影响拦截的时效性,同时在拦截过程中会有车辆不注意撞在拦截路锥上造成极大的危害。
因此,发明一种智能拦截路障系统很有必要。
发明内容
为此,本发明提供一种智能拦截路障系统,通过多个智能拦截路障组成一个编队,通过远程遥控,迅速到达预设位置,形成拦截曲线,以解决高速的车流时刻危及人车安全,摆放效率不高影响拦截的时效性,同时在拦截过程中会有车辆不注意撞在拦截路锥上造成极大的危害的问题。
为了实现上述目的,本发明提供如下技术方案:一种智能拦截路障系统,包括智能拦截路障模块,所述智能拦截路障模块连接端分别设有联动模块、自检测模块、车辆识别模块和后台模块,所述后台模块连接端设有自编号自联模块,所述后台模块输入端连接有监控模块;
所述联动模块连接端设有移动模块,所述移动模块连接端设有路径计算模块,所述路径计算模块连接端设有路径上传模块,所述路径上传模块连接端设有路径共享模块,所述移动模块输入端连接有智能归位模块。
优选的,所述智能拦截路障模块连接端设有GPS定位模块,所述GPS定位模块连接端设有环境监测模块,所述环境监测模块连接端设有强制控制模块。
优选的,所述自检测模块连接端设有程序检测模块,所述程序检测模块连接端设有电量报警模块,所述电量报警模块连接端设有充电模块。
优选的,所述自检测模块连接端设有移动检测模块,所述移动检测模块连接端设有故障自动警示模块。
优选的,所述车辆识别模块连接端分别设有障碍识别模块、车距监测模块和车速监测模块。
优选的,所述智能拦截路障模块连接端设有数据处理器模块,所述数据处理器模块连接端设有信号接收器模块,所述信号接收器模块连接端设有无线通讯模块。
优选的,所述无线通讯模块连接端设有信号传输模块,所述信号传输模块连接端设有远程遥控模块。
优选的,所述数据处理器模块输入端连接有路径共享模块。
优选的,所述智能拦截路障模块包括拦截路障本体,所述拦截路障本体外侧设有两个摄像头,两个所述摄像头顶部均设有挡雨罩,所述挡雨罩与拦截路障本体固定连接,所述拦截路障本体底部固定设有移动组件,所述移动组件包括支撑底板,所述支撑底板两侧均设有移动轮。
优选的,所述拦截路障本体一侧固定连接有多个伸缩杆,多个所述伸缩杆外部均套设有缓冲弹簧,所述伸缩杆一侧固定连接有防撞缓冲板。
本发明的有益效果是:
1、本发明通过移动模块将所有需要移动的拦截路障本体的移动路径进行计算,并将计算的路径进行上传和共享,通过数据处理器模块对计算路径进行分析和肯定或者是修改,避免拦截路障本体相互碰撞影响拦截效率,同时通过移动模块和来车时间、速度以及距离快速的移动拦截路障本体,若移动路径上有障碍便可通过移动模块控制拦截路障本体改变行动角度,达到快速拦截的目的,形成拦截曲线避免高速的车流时刻危及人车安全,通过远程遥控,迅速到达预设位置,摆放效率提高;
2、本发明通过自检测模块连接端的程序检测模块会检测智能拦截路障模块内部程序以及电量,若电量不足便会将信息发送给电量报警模块,电量报警模块将信息发送给充电模块此时智能拦截路障模块开始充电,能够在艰苦环境下长期待命,随时响应,是民警的得力助手,避免拦截过程中被车辆碰撞。
附图说明
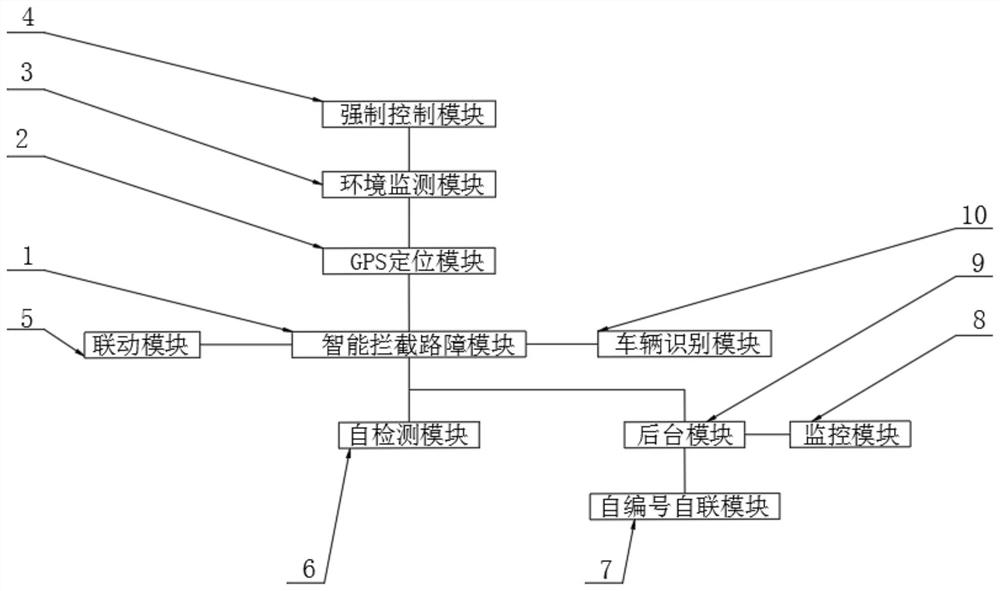
图1为本发明提供的整体系统结构图;
图2为本发明提供的联动模块系统结构图;
图3为本发明提供的自检测模块系统结构图;
图4为本发明提供的车辆识别模块系统结构图;
图5为本发明提供的智能拦截路障模块系统结构图;
图6为本发明提供的拦截路障本体结构示意图。
图中:1智能拦截路障模块、2GPS定位模块、3环境监测模块、4强制控制模块、5联动模块、6自检测模块、7自编号自联模块、8监控模块、9后台模块、10车辆识别模块、11智能归位模块、12移动模块、13路径计算模块、14路径上传模块、15路径共享模块、16程序检测模块、17电量报警模块、18充电模块、19移动检测模块、20故障自动警示模块、21障碍识别模块、22车距监测模块、23车速监测模块、24数据处理器模块、25信号接收器模块、26无线通讯模块、27信号传输模块、28远程遥控模块、29挡雨罩、30防撞缓冲板、31缓冲弹簧、32伸缩杆、33拦截路障本体、34摄像头、35支撑底板、36移动轮。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例:
参照附图1-6,本发明提供的一种智能拦截路障系统,包括智能拦截路障模块1,所述智能拦截路障模块1连接端分别设有联动模块5、自检测模块6、车辆识别模块10和后台模块9,所述后台模块9连接端设有自编号自联模块7,所述后台模块9输入端连接有监控模块8;
所述联动模块5连接端设有移动模块12,所述移动模块12连接端设有路径计算模块13,所述路径计算模块13连接端设有路径上传模块14,所述路径上传模块14连接端设有路径共享模块15,所述移动模块12输入端连接有智能归位模块11,联动模块5可快速进行联动,移动模块可控制拦截路障移动,自检测模块6可快速检测智能拦截路障模块1内信息,路径计算模块13可计算拦截路障移动路径,路径共享模块15可共享多个移动路径,避免路径重复碰撞。
进一步地,所述智能拦截路障模块1连接端设有GPS定位模块2,所述GPS定位模块2连接端设有环境监测模块3,所述环境监测模块3连接端设有强制控制模块4,GPS定位模块2方便对其位置进行定位,环境监测模块3可监测当前位置状况,强制控制模块4强制收回拦截路障或是拒绝进行拦截,避免造成拦截事故。
进一步地,所述自检测模块6连接端设有程序检测模块16,所述程序检测模块16连接端设有电量报警模块17,所述电量报警模块17连接端设有充电模块18,电量报警模块17可自动报警电量不足,充电模块18可对拦截路障进行充电。
进一步地,所述自检测模块6连接端设有移动检测模块19,所述移动检测模块19连接端设有故障自动警示模块20,移动检测模块19可对移动模块12进行检测避免移动故障。
进一步地,所述车辆识别模块10连接端分别设有障碍识别模块21、车距监测模块22和车速监测模块23,障碍识别模块21会对智能拦截路障模块1行走的沿途进行摄像识别避免有障碍物阻挡,车距监测模块22会对高速公路对向来车方向进行监测,并得到对向所有汽车即时距离数据,车速监测模块23对对向所有汽车进行车速监测,并得到车速监测数据。
进一步地,所述智能拦截路障模块1连接端设有数据处理器模块24,所述数据处理器模块24连接端设有信号接收器模块25,所述信号接收器模块25连接端设有无线通讯模块26,数据处理器模块24可对数据进行处理。
进一步地,所述无线通讯模块26连接端设有信号传输模块27,所述信号传输模块27连接端设有远程遥控模块28,远程遥控模块28远程遥控方便快捷。
进一步地,所述数据处理器模块24输入端连接有路径共享模块15。
进一步地,所述智能拦截路障模块1包括拦截路障本体33,所述拦截路障本体33外侧设有两个摄像头34,两个所述摄像头34顶部均设有挡雨罩29,所述挡雨罩29与拦截路障本体33固定连接,所述拦截路障本体33底部固定设有移动组件,所述移动组件包括支撑底板35,所述支撑底板35两侧均设有移动轮36,摄像头34具有摄像检测路障、车速和车距作用,挡雨罩29具有挡雨作用,支撑底板35具有支撑作用,移动轮36方便其移动。
进一步地,所述拦截路障本体33一侧固定连接有多个伸缩杆32,多个所述伸缩杆32外部均套设有缓冲弹簧31,所述伸缩杆32一侧固定连接有防撞缓冲板30,伸缩杆32和缓冲弹簧31具有缓冲作用,防撞缓冲板30防止拦截路障本体33被撞坏。
本发明的使用过程如下:在使用本发明时,将多个拦截路障本体33放在路缘带上,使用时通过远程控制一键启动使远程遥控模块28将指令信息传输给信号传输模块27,信号传输模块27将得到的指令信息经过数字加密后传输给无线通讯模块26,无线通讯模块26将得到的指令信息迅速传输给信号接收器模块25,信号接收器模块25将得到的信息传输给数据处理器模块24,数据处理器模块24将加密信息进行解密以及分析并将分析得出的指令发送给智能拦截路障模块1,智能拦截路障模块1将数据处理器模块24发送来的信息分别传输给联动模块5和车辆识别模块10,此时车辆识别模块10开始运转并将指令分别发送给障碍识别模块21、车距监测模块22和车速监测模块23,障碍识别模块21会对智能拦截路障模块1行走的沿途进行摄像识别避免有障碍物阻挡,车距监测模块22会对高速公路对向来车方向进行监测,并得到对向所有汽车即时距离数据,车速监测模块23对对向所有汽车进行车速监测,并得到车速监测数据,通过障碍识别模块21、车距监测模块22和车速监测模块23将测得的障碍信息、车距信息以及车速信息进行打包传送给车辆识别模块10,车辆识别模块10将信息传输给智能拦截路障模块1,智能拦截路障模块1将得到的信息进行分析并测得即将到来的汽车到达时间来控制联动模块5,联动模块5通过智能拦截路障模块1传输过来的信息来控制所有拦截路障本体33的移动模块12,移动模块12将所有需要移动的拦截路障本体33的移动路径进行计算,并将计算的路径进行上传和共享,通过数据处理器模块24对计算路径进行分析和肯定或者是修改,避免拦截路障本体33相互碰撞影响拦截效率,同时通过移动模块12和来车时间、速度以及距离快速的移动拦截路障本体33,若移动路径上有障碍便可通过移动模块12控制拦截路障本体33改变行动角度,在拦截接收后通过远程遥控模块28发送归位指令,远程遥控模块28将指令发送给信号传输模块27,信号传输模块27将指令发送给无线通讯模块26,无线通讯模块26将指令发送给信号接收器模块25,信号接收器模块25将指令发送给数据处理器模块24,数据处理器模块24将指令发送给智能拦截路障模块1,智能拦截路障模块1将指令发送给联动模块5,联动模块5将指令发送给移动模块12,移动模块12将指令发送给智能归位模块11,智能归位模块11根据移动路径使拦截路障本体33返回到原位便达到快速拦截目的,同时智能拦截路障模块1的内部设置有GPS定位模块2,GPS定位模块2的连接端的环境监测模块3可得到当前位置的实时环境数据,若环境数据不适合进行阻拦便可直接将信息发送给强制控制模块4,强制控制模块4会强制收回拦截路障本体33或是拒绝进行拦截,避免造成拦截事故,同时智能拦截路障模块1的连接端设有自检测模块6,自检测模块6通过移动检测模块19对移动模块12进行检测避免移动故障,若移动故障便可将信息发送给故障自动警示模块20,故障自动警示模块20会迫使报警声响起以及将信息通过智能拦截路障模块1发送给后台模块9,并等待更换,更换完成后便可通过自编号自联模块7进行重新联动,同时通过后台模块9连接端的监控模块8实施对智能拦截路障模块1进行监测避免被盗,且自检测模块6连接端的程序检测模块16会检测智能拦截路障模块1内部程序以及电量,若电量不足便会将信息发送给电量报警模块17,电量报警模块17将信息发送给充电模块18此时智能拦截路障模块1开始充电,能够在艰苦环境下长期待命,随时响应,是民警的得力助手。
以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
- 一种智能拦截路障系统
- 一种适用于阻车路障的自动拦截系统