模块化交叉式无人机及其工作方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于航空技术领域,具体指代一种模块化交叉式无人机及其工作方法。
背景技术
目前航空领域兴起,借助无人机这个载体,很多设备都可以在极端环境下帮助人们完成任务。其中多旋翼无人机由于其结构简单,具有操控简单、可靠性高和维护成本低等优点,越来越多的出现在人们的日常生活、工作和娱乐中。多旋翼无人机,也可叫做多轴无人机,可以看成一类有三个或更多旋翼的直升机,其根据旋翼数量,又可细分为三旋翼、四旋翼、六旋翼、八旋翼等。一般认为,螺旋桨数量越多,飞行越平稳,操作越容易。
由于单副旋翼旋转时会产生反扭矩,因此,目前市面上的多旋翼无人机为抵消反扭矩,大多数都采用具有对称结构的偶数旋翼布局,尤其以四旋翼和六旋翼无人机居多,这一类无人机每对旋翼可以相互抵消各自的反扭矩,也正由于此原因,奇数旋翼布局的无人机并不多见,即使有一些,也并没有实现模块化,并且机体结构布置不紧凑、使用环境单一,无法在恶劣环境如突风、强对流环境中使用,稳定性差,进而导致其工作效率低、成本高、调度繁琐、不便运输。而模块化机型在工作效率、工作成本以及调度指挥上有很大的优势。
发明内容
针对于上述现有技术的不足,本发明的目的在于提供一种模块化交叉式无人机及其工作方法,采用交叉式旋翼作为升力面,不仅可以自平衡反扭矩,轻松实现奇数旋翼布局,以解决现有技术中奇数旋翼布局的多旋翼无人机不容易实现,且结构零散,模块化程度不高等问题。
为达到上述目的,本发明采用的技术方案如下:
一种模块化交叉式无人机,包括机身模块,所述的机身模块采用多边形外轮廓;所述的机身模块上方设置飞控模块,根据机身模块的多边形外轮廓,对应设置多组旋翼模块,所述的旋翼模块通过折叠臂模块与机身模块连接,所述的折叠臂模块下方活动设置起落架模块;本发明利用机身模块,飞控模块,折叠臂模块,旋翼模块,起落架模块分别集成化为模块,通过简单拼接模块可以实现快速组装多旋翼无人机。
所述的旋翼模块采用交叉式旋翼布局,包括:基座,电机,电机齿轮,大齿轮,一对换向锥齿轮,两根旋翼轴,轴承,桨榖,旋翼;所述的电机安装在基座上,为旋翼旋转提供动力,所述的轴承也安装在基座上;两根旋翼轴分别穿过轴承;电机齿轮设于电机轴上,与电机轴通过螺栓紧固;大齿轮设于其中一根旋翼轴下端,电机齿轮和大齿轮啮合组成一级减速,一对换向锥齿轮分别设于两根旋翼轴中部,相互啮合,使两根旋翼轴转向相反;桨榖安装在旋翼轴顶部,旋翼安装在桨榖上。上述旋翼模块采用交叉式双旋翼提供升力,具有飞行稳定性好,结构紧凑,抗侧风能力强的优点。所述的交叉式双旋翼同步反向旋转,可以相互平衡各自产生的反扭矩,无需额外机构平衡反扭矩。
进一步,所述的机身模块包括上下设置的机身上板,机身下板以及折叠固定件;其中所述的折叠固定件位于机身上板和机身下板之间,分别通过螺钉与机身上板和机身下板固定连接,
进一步,所述的机身模块采用的多边形外轮廓为三角形外轮廓、或者四边形外轮廓、或者五边形外轮廓,即机身上板,机身下板为三角形外轮廓、或者四边形外轮廓、或者五边形外轮廓。采用的机身模块提供多种类型可替换,分别可组成不同布局多旋翼,比如替换为三角形机身模块可组成三旋翼无人机;替换为五边形机身模块可组成五旋翼无人机。折叠臂模块采用折叠机构设计,使得多旋翼无人机可折叠伸展,在储存环境下可减小体积,减少空间占用率。
进一步,所述的折叠臂模块包括:折叠臂,折叠旋转件,旋翼模块安装座,起落架连接件;所述的折叠旋转件固定安装于折叠臂内端,并通过销与机身模块的折叠固定件相连,使折叠臂模块可相对机身模块转动;所述的旋翼模块安装座固定于折叠臂外端,上面留有与旋翼模块对接的安装接口,起落架连接件固定安装于折叠臂中部下方。
进一步,所述的飞控模块安装于机身上板的上方。
本发明还公开了一种模块化交叉式无人机的工作方法,所述的方法具体为:
旋翼模块采用交叉式双旋翼布局,双旋翼的反扭矩可以相互抵消,因此每一旋翼模块均可单独作为升力面和操纵面而不必增加其他抵抗反扭矩机构;
当载荷较少较轻时,采用单独一副旋翼模块就可构成无人机,此时双旋翼的反扭矩相互抵消,采用双旋翼的总距操纵来实现无人机的垂向上升下降运动,双旋翼的同向横向周期变距来实现无人机的横向滚转运动,双旋翼的同向纵向周期变距来实现无人机的纵向俯仰运动,双旋翼的总距差动来实现无人机的航向偏航运动;
当载荷较多较重时,可采用三副、四副甚至N副旋翼模块+三角形或四边形以及N边形机身模块构成无人机,此时每副旋翼模的反扭矩均可自相抵消,采用所有旋翼模块的转速同步控制来实现无人机的垂向上升下降运动,左右两边的旋翼模块转速差动来实现无人机的横向滚转运动,前后两边的旋翼模块转速差动来实现无人机的纵向俯仰运动,每副旋翼模总距差动来实现无人机的航向偏航运动。
本发明与现有技术的有益效果在于:
本发明采用交叉式旋翼作为升力面,不仅可以自平衡反扭矩,轻松实现奇数旋翼布局,而且具有任务适应性强、飞行稳定性好、结构紧凑、性能强的优点。并且采用模块化拼接,大大减少无人机的制作成本,增加了零件互换性。
附图说明
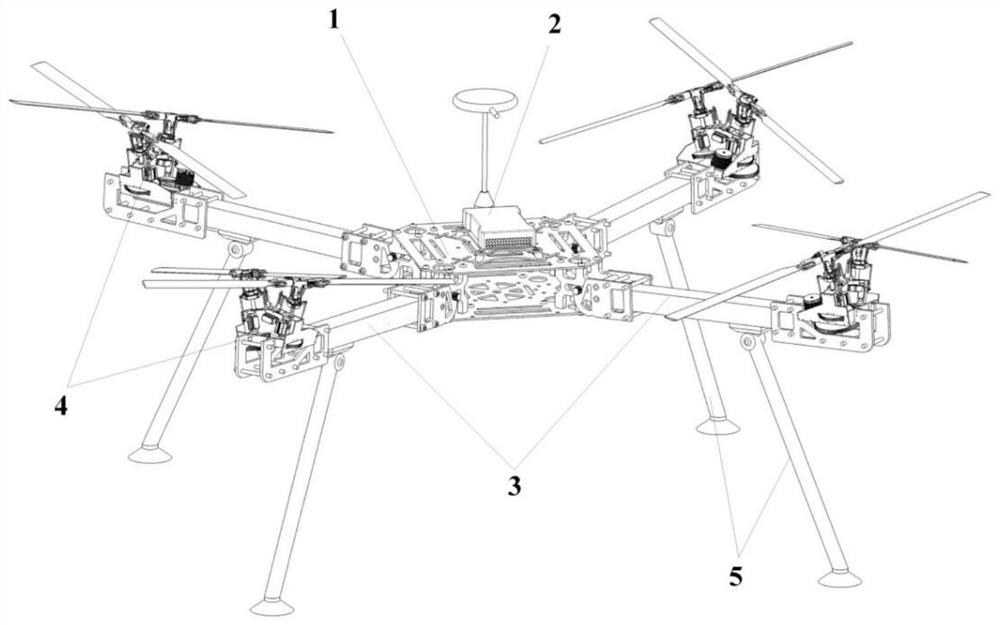
图1是本发明实施例1模块化交叉式四旋翼无人机的示意图;
图2是实施例1模块化交叉式四旋翼折叠状态的示意图;
图3是实施例1模块化交叉式四旋翼的机身模块示意图;
图4是本发明模块化交叉式无人机折叠臂模块的示意图;
图5是本发明模块化交叉式无人机旋翼模块的示意图;
图6是本发明实施例2模块化交叉式三旋翼无人机的示意图;
图7是本发明实施例3模块化交叉式五旋翼无人机的示意图;
图中,1-机身模块,2-飞控模块,3-折叠臂模块,4-旋翼模块,5-起落架模块,6-机身上板,7-机身下板,8-折叠固定件,9-折叠臂,10-折叠旋转件,11-旋翼模块安装座,12-起落架连接件,13-基座,14-电机,15-电机齿轮,16-大齿轮,17-换向锥齿轮,18-旋翼轴,19-轴承,20-桨榖,21-旋翼。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例1
如图1~图5所示,本发明的一种模块化交叉式四旋翼无人机,其由机身模块1,飞控模块2,折叠臂模块3,旋翼模块4,起落架模块5等构成;
机身模块1包括:机身上板6,机身下板7,折叠固定件8;其中,折叠固定件8位于机身上板6和机身下板7之间,共四个,分别通过螺钉与机身上板6和机身下板7固定连接,机身上板6和机身下板7采用四边形外轮廓。
所述飞控模块2安装于机身上板6上方,负责无人机的控制及导航。
本实施例中折叠臂模块3共有四套,单套折叠臂模块3包括:折叠臂9,折叠旋转件10,旋翼模块安装座11,起落架连接件12;其中折叠旋转件10固定安装于折叠臂9内端,并通过销与机身模块1的折叠固定件8相连,使折叠臂模块3可相对机身模块1转动,旋翼模块安装座11固定于折叠臂9外端,上面留有与旋翼模块4对接的安装接口,起落架连接件12固定安装于折叠臂9中部下方。
所述旋翼模块4共有四套,单套旋翼模块4采用交叉式旋翼布局,包括:基座13,电机14,电机齿轮15,大齿轮16,换向锥齿轮17,旋翼轴18,轴承19,桨榖20,旋翼21;其中基座13上面留有与旋翼模块安装座11对接的安装接口,可以通过螺栓连接将旋翼模块4整体安装到折叠臂9的外端,电机14固定安装在基座13上,为旋翼21旋转提供动力,电机齿轮15设于电机轴上,与电机轴通过螺栓紧固;大齿轮16设于一根旋翼轴18下端,电机齿轮15和大齿轮16啮合组成一级减速,一对换向锥齿轮17分别设于两根旋翼轴18中部,相互啮合,使两根旋翼轴18转向相反,轴承19安装在基座13上,两根旋翼轴18分别穿过轴承19,桨榖20安装在旋翼轴18顶部,旋翼21安装在桨榖20上。
所述起落架模块5共有四件,分别安装于四套折叠臂模块3的起落架连接件12上,可绕起落架连接件12转动。
所述的机身模块1,飞控模块2,折叠臂模块3,旋翼模块4,起落架模块5分别集成化为模块,通过简单拼接模块可以实现快速组装多旋翼无人机。
所述的折叠臂模块3采用折叠机构设计,使得多旋翼无人机可折叠伸展,在储存环境下可减小体积,减少空间占用率。
所述的旋翼模块4采用交叉式双旋翼提供升力,具有飞行稳定性好,结构紧凑,抗侧风能力强的优点。
所述的交叉式双旋翼同步反向旋转,可以相互平衡各自产生的反扭矩,无需额外机构平衡反扭矩。
实施例2
如图6所示,本发明的一种模块化交叉式三旋翼无人机,与实施例1的主要区别在于:本实施例的机身模块1采用三角形外轮廓的机身上板6和机身下板7;
本实施例的机身模块1安装三个折叠固定件8;
本实施例的折叠臂模块3共有三套,分别与三个折叠固定件8连接;
本实施例的旋翼模块4共有三套,分别与三套折叠臂模块3的旋翼模块安装座11连接;
本实施例的起落架模块5共有三件,分别与三套折叠臂模块3的起落架连接件12连接。
实施例3
如图7所示,本发明的一种模块化交叉式五旋翼无人机,与实施例1的主要区别在于:本实施例的机身模块1采用五边形外轮廓的机身上板6和机身下板7;
本实施例的机身模块1安装五个折叠固定件8;
本实施例的折叠臂模块3共有五套,分别与五个折叠固定件8连接;
本实施例的旋翼模块4共有五套,分别与五套折叠臂模块3的旋翼模块安装座11连接;
本实施例的起落架模块5共有五件,分别与五套折叠臂模块3的起落架连接件12连接。
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,例如机身模块这些改进也应视为本发明的保护范围。
- 模块化交叉式无人机及其工作方法
- 一种模块化的交叉式纵列无人直升机及其工作方法