自动驾驶车辆控制器的电源管理系统、方法及装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及车辆自动控制技术领域,尤其涉及一种自动驾驶车辆控制器的电源管理系统、方法及装置。
背景技术
智能车辆控制领域尤其是自动驾驶车辆控制技术是现在智能车辆研发的热点。自动驾驶控制器中的电路和使用到的主控芯片变得越来越复杂,一般会同时用到GPU,CPU,SOCS,DSP,MCU,MEMORY 和其它ASIC芯片。控制板上给各芯片供电的电源变得越来越多,电压的种类包含有12v,5v,3.3v,2.5v,1.8v,1.2v,0.9v等各种电压,精度要求也越来越高。稳定而可控的电源开始成为自动驾驶控制器中的关键要素之一。如何快速而可靠地监测各路电源,并对所有电源进行同步管理是其中的难点。由于车载环境的复杂,车上众多的电子设备在车辆启动和关闭时都会对车上控制器的电源产生各种影响,从而使启动和关闭时产生很多不确定状态而影响系统。
有的车载控制板电源管理技术使用分离器件加上MCU来进行监控和管理。然而,由于MCU的运行速度以及运行原理,只能对少数几路电源进行监控,并且不能做到同时监控,而是进行轮询监控。一般的频率最高为几KHz,仍然无法实时监控所有电源并记录以及对所有电源进行上下电的管理,从而导致自动驾驶车辆控制器在车辆启动和停止过程中出现电源的不稳定和不可控情况,使控制器上主要芯片的I/O状态和芯片间的信号状态出现不确定状态,产生系统问题,最终导致严重的自动驾驶安全问题。
因此,有必要提出一种自动驾驶车辆控制器的电源管理系统、方法及装置,以解决上述问题。
发明内容
本发明提供一种自动驾驶车辆控制器的电源管理系统、方法及装置,以解决现有现有自动驾驶车载控制板电源管理技术无法实时监控所有电源并记录以及对所有电源进行上下电的管理,从而导致自动驾驶车辆控制器在车辆启动和停止过程中出现电源的不稳定和不可控情况的问题。
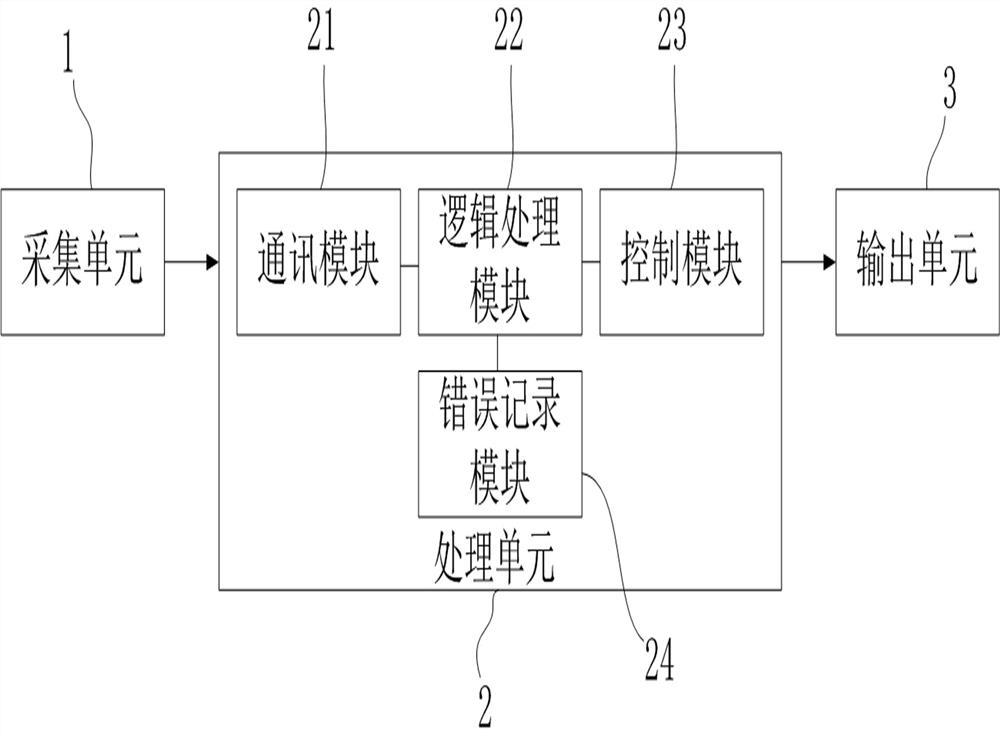
第一方面,本发明提供一种自动驾驶车辆控制器的电源管理系统,包括:采集单元、处理单元以及输出单元,所述处理单元包括通讯模块、逻辑处理模块、控制模块以及错误记录模块,所述采集单元与所述处理单元信号连接,所述处理单元与所述输出单元信号连接;
所述采集单元,用于采集自动驾驶车辆控制器上各芯片的电源的电压数据,对所述电压数据与各芯片的电源的电压阈值进行比较得到电压比较结果,将所述电压比较结果发送至处理单元;
所述处理单元,用于通过通讯模块接收所述电压比较结果;通过逻辑处理模块根据所述电压比较结果生成对所述各芯片的电源的逻辑处理信号,其中,所述逻辑处理信号用于对所述各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理;通过控制模块向输出单元输出所述逻辑处理信号;通过错误记录模块对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录;
所述输出单元,用于接收并执行所述逻辑处理信号。
进一步地,所述采集单元包括ASCIC芯片。
进一步地,所述采集单元,还用于采集自动驾驶车辆控制器上各芯片的温度数据和电流数据。
进一步地,所述通讯模块通过SPI通讯接口与所述采集单元连接。
进一步地,所述输出单元包括MOS管的控制端,LDO、DC-DC的使能输入端,以及自动驾驶车辆控制器上各芯片的复位端。
进一步地,所述芯片包括GPU、CPU、ASIC、SOCS、DSP、MCU以及MEMORY。
进一步地,所述处理单元为非易失性FPGA芯片。
进一步地,所述控制模块,还用于输出所述自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果。
第二方面,本发明提供一种自动驾驶车辆控制器的电源管理方法,包括:
接收自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果;
根据所述电压比较结果,生成对所述各芯片的电源的逻辑处理信号,其中,所述逻辑处理信号用于对所述各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理;
对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录;
输出所述逻辑处理信号,以对自动驾驶车辆控制器上各芯片的电源进行逻辑控制。
第三方面,本发明提供一种自动驾驶车辆控制器的电源管理装置,包括:
通讯模块,用于接收自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果;
逻辑处理模块,用于根据所述电压比较结果,生成对所述各芯片的电源的逻辑处理信号,其中,所述逻辑处理信号用于对所述各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理;
错误记录模块,用于对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录;
控制模块,用于输出所述逻辑处理信号,以对自动驾驶车辆控制器上各芯片的电源进行逻辑控制。
本发明的有益效果如下:本发明提供的一种自动驾驶车辆控制器的电源管理系统、方法及装置,通过接收自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果,根据电压比较结果,生成对各芯片的电源的逻辑处理信号,其中,逻辑处理信号用于对各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理,对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录,输出逻辑处理信号,以对自动驾驶车辆控制器上各芯片的电源进行逻辑控制,从而可以实现实时监控自动驾驶车辆控制器上各芯片的电源电压并记录,并对所有电源进行上下电的管理,从而避免自动驾驶车辆控制器在车辆启动和停止过程中出现电源的不稳定和不可控情况的问题。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的自动驾驶车辆控制器的电源管理系统的原理图。
图2为本发明实施例提供的自动驾驶车辆控制器的电源管理系统的处理单元示意图。
图3为本发明实施例提供的自动驾驶车辆控制器的电源管理系统的详细示例性体系结构图。
图4为本发明实施例提供的自动驾驶车辆控制器的电源管理方法的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。以下结合附图,详细说明本发明各实施例提供的技术方案。
随着自动驾驶车辆控制器越来越复杂,从原来的单个MCU做的控制器,到多个MCU的域控制器逐渐演变为更为复杂的自动驾驶车辆控制器。此类控制器上有多个GPU或CPU以及其它ASIC、DSP或MCU芯片。所以控制器上的电源也越来越多,包括12V、5V、3.3V、2.5V、1.8V、1.2V、0.9V等不同电源电压,从而引起在系统上电和断电的过程中会产生各芯片之间同时上电,芯片与芯片之间通讯时的初始状态不确定性问题,和同时断电时最终状态的不确定问题,以及系统运行过程中多路电源中不稳定的问题。本发明通过在自动驾驶车辆控制器上增加FPGA(现场可编程门阵列)芯片和ASCIC(模拟传感控制)芯片并设计控制程序,对自动驾驶车辆控制器中各主要芯片,例如:GPU(图形处理器)、CPU(中央处理器)、ASICS(应用型专用集成电路)、SOCS(系统芯片)、DSP(数字信号处理)、MCU(微控制单元)以及MEMORY(存储器)的各路供电电源进行实时监测,并根据监测结果实时调整供电电源的上电、断电顺序以及优化供电电源的稳定性,克服了现有解决方案的局限性,增强了自动驾驶车辆控制器内各芯片供电的稳定性,同时提升整个系统的稳定性。
请参阅图1,本发明提供一种自动驾驶车辆控制器的电源管理系统,包括:采集单元1、处理单元2以及输出单元3。处理单元2包括通讯模块21、逻辑处理模块22、控制模块23以及错误记录模块24,采集单元1与处理单元2信号连接,处理单元2与输出单元信号3连接。
采集单元1,用于采集自动驾驶车辆控制器上各芯片的电源的电压数据,对电压数据与各芯片的电源的电压阈值进行比较得到电压比较结果,将电压比较结果发送至处理单元。处理单元2,用于通过通讯模块接收电压比较结果;通过逻辑处理模块根据电压比较结果生成对各芯片的电源的逻辑处理信号,其中,逻辑处理信号用于对各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理;通过控制模块向输出单元输出逻辑处理信号;通过错误记录模块对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录。输出单元3,用于接收并执行逻辑处理信号。
其中,采集单元1包含ASCIC芯片,1颗ASCIC芯片可以对20路电源进行电压采集,并且可以设置电压阈值。电压阈值根据每一路电压有所不同,例如,一个3.3v的电源,当上电过程中实际电压值超过3.2V时认为达到可用电压并输出信号;而1.8V的电源则当电源达到1.75V时认为达到可用电压并输出信号,这个电压阈值可以根据不同的要求来进行设置。
处理单元2中包含通讯模块21,逻辑处理模块22,控制模块23,错误记录模块24,通讯模块21可以用SPI通讯接口与采集单元1进行连接,处理单元2在获取采集单元1输出的电压比较结果后,通过逻辑处理模块22进行逻辑处理,再通过控制模块23控制I/O的输出信号,同时独立的错误记录模块24对所有发生电压低于或高于阈值的情况进行记录,并可以通过控制模块23输出。控制模块23还用于输出自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果。
输出单元3可以是MOS管的控制端,LDO(低压差线性稳压器)、DC-DC的使能输入端,以及自动驾驶车辆控制器上各芯片的复位端。
请参阅图2和图3,逻辑处理模块22包括上电顺序管理模块221,下电顺序管理模块222,复位管理模块223以及其它逻辑模块224 。逻辑处理模块22可根据不同芯片的上电要求来进行编程。
例如,要求MOS管204达到1.2v 后经过2个时钟周期,再开通LDO205的0.9v,然后再经过2个时钟周期才开通,DC-DC206的2.5v的电压,则在上电顺序管理模块221中进行程序编写,通过硬件编程语言verilog进行编程,输入源为MOS管204,LDO205,DC-DC206,经过条件和延时逻辑控制,最后通过控制模块23对I/O进行控制并输出相应控制结果。
在例如,要求先关闭MOS管204的1.2v,后经过2个时钟周期,再关闭LDO205的0.9v,然后再经过2个时钟周期才关闭DC-DC206的2.5v的电压,则在下电顺序管理模块222中进行程序编写,通过硬件编程语言verilog进行编程,输入源为MOS管204,LDO205,DC-DC206,经过条件和延时逻辑控制,最后通过控制模块23对I/O进行控制并输出相应控制结果,进行下电顺序管理。如果没有上电与下电顺序管理,系统中的芯片203有可能出现初始工作异常或是断电工作异常的状态而引发系统问题。
在系统正常运行过程中,如果某一路电源出现异常,则通过错误记录模块24进行异常错误记录,并且可以通过控制模块23进行输出控制,对相应的异常电源对应的芯片进行复位重置,并且允许其它芯片203对此错误记录进行访问和读取。
在系统正常运行过程中,如果某一路电源出现异常,则通过错误记录模块24进行异常错误记录,并且可以通过控制模块23进行输出控制,对相应的异常电源对应的芯片进行复位控制并且可以对整个系统进行复位控制。
通过ASCIC202微调DC-DC206的电压,通过其他逻辑模块224制作电源管理算法,能够管理连接到 ASCIC器件微调引脚的DC-DC转换器的输出电压。ASCIC器件通过其片上闭环控制机制精确地将DC-DC转换器的输出电压保持在电源管理算法规定的电平,提高DC-DC的电源输出精度。
其他逻辑模块224可根据不同电源的实际情况进行设置,例如需要控制外部的一个LED灯或者一个风扇的开关,可以通过其他逻辑模块224中编写相应的程序,来使得确定输入条件下能够去控制输出管脚的状态。
本实施例使用一种非易失性的FPGA201和ASCIC202对整个自动驾驶车辆控制器上的所有电源进行监控,监控所有电源的准确数值,在电源发生问题的情况下能够反馈给主控芯片,并且控制所有CPU、MCU等的供电及上下电顺序,使系统更稳定。
此非易失性FPGA可用I/O超过200个。FPGA芯片主要由7部分完成,分别为:可编程输入输出单元、基本可编程逻辑单元、完整的时钟管理、嵌入块式RAM、丰富的布线资源、内嵌的底层功能单元和内嵌专用硬件模块,特点是通过使用硬件语言编程可以是FPGA所有I/O和内部逻辑电路都运行。不同于MCU的I/O轮询工作模式,FPGA是并行同步执行内部逻辑程序,由时钟同步驱动,可以做到所有I/O同步运行。非易失性FPGA不同于普通FPGA,优点是单芯片单电源瞬时上电工作,在10ms内可以上电工作,可以比一般MCU更快的工作和进入电源管理状态。ASCIC芯片拥有20个高精度可编程电压阈值比较器,可同时判断20个电源的过压和欠压故障。
ASCIC芯片还有2个电流监控电路,以及2个可编程阈值比较器。采集单元还用于采集自动驾驶车辆控制器上各芯片的温度数据和电流数据。温度监控器直接连接到温度传感二极管,可测量安装在电路板上的器件或给定位置的板上温度。温度监控电路同样包含可编程阈值比较器,使用ASCIC202测量电压,电流和温度的状态,并通过一个通讯接口连接FPGA201。使用FPGA201内部的逻辑算法根据这些状态数据执行电源管理和控制处理功能。FPGA201控制系统中电源的MOS管204,LDO205,DC-DC206的使能信号,进而监测和控制系统中所有电源的上下电顺序。
具体地,使用FPGA201监测整个电源系统,系统中电源MOS204,LDO205,DC-DC206等出现电压超过或者低于阈值时的情况,则把该状况下的时间和电压,以及电流温度等信息全都记录到错误日志207中,并且可以通过FPGA201保存和传输给系统中的其他的芯片203(例如GPU、CPU、ASICS、SOCS、DSP、MCU、MEMORY)。
具体地,使用FPGA201监测整个电源系统,系统中电源MOS管204,LDO 205,DC-DC206等出现电压超过或者低于阈值时的情况,进行错误日志207记录的同时,可以通过FPGA201的控制输出模块对系统中的GPU、CPU、ASICS、SOCS、DSP、MCU、MEMORY等芯片203进行复位控制,可以单独给任意有电压问题的芯片输出复位控制信号或者同时对系统所有芯片输出复位控制信号。
具体地,所选用的非易失性FPGA 201有超过200个可编程I/O,所有可以同时监管100路电源并且对100颗系统上的芯片或电源进行复位和使能控制,能同时监控超过100路不同的电源。当任何一路电源出现不稳定时,低于阈值或者超出阈值时,可以实时监测到并进行记录和存储,低于一定阈值而可能是某些芯片工作不正常的情况,可以根据故障数据立即启动任意或者所有电源对单一芯片或整个系统进行重启,以避免数据出错。
请参阅图4,本发明还提供一种自动驾驶车辆控制器的电源管理方法,包括:
步骤S401,接收自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果。
步骤S402,根据电压比较结果,生成对各芯片的电源的逻辑处理信号,其中,逻辑处理信号用于对各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理。
步骤S403,对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录。
步骤S404,输出逻辑处理信号,以对自动驾驶车辆控制器上各芯片的电源进行逻辑控制。
本发明实施例还提供一种自动驾驶车辆控制器的电源管理装置,包括:
通讯模块,用于接收自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果。
逻辑处理模块,用于根据电压比较结果,生成对各芯片的电源的逻辑处理信号,其中,逻辑处理信号用于对各芯片的电源进行上电顺序管理、下电顺序管理、复位管理以及外部控制管理。
错误记录模块,用于对自动驾驶车辆控制器上各芯片的电源的电压数据与各芯片的电源的电压阈值之间的电压比较结果进行记录。
控制模块,用于输出逻辑处理信号,以对自动驾驶车辆控制器上各芯片的电源进行逻辑控制。
本发明实施例还提供一种存储介质,本发明实施例还提供一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现本发明提供的自动驾驶车辆控制器的电源管理方法的各实施例中的部分或全部步骤。所述的存储介质可为磁碟、光盘、只读存储记忆体(英文:Read-OnlyMemory,简称:ROM)或随机存储记忆体(英文:RandomAccessMemory,简称:RAM)等。
本领域的技术人员可以清楚地了解到本发明实施例中的技术可借助软件加必需的通用硬件平台的方式来实现。基于这样的理解,本发明实施例中的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
本说明书中各个实施例之间相同相似的部分互相参见即可。尤其,对于自动驾驶车辆控制器的电源管理装置实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例中的说明即可。
以上所述的本发明实施方式并不构成对本发明保护范围的限定。
- 自动驾驶车辆控制器的电源管理系统、方法及装置
- 自动驾驶控制器、包括自动驾驶控制器的车辆系统及自动驾驶控制方法