一种适用于装卸天文望远镜的机械手
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及望远镜加工领域,更具体的说是一种适用于装卸天文望远镜的机械手。
背景技术
通过机械臂对需要进行组装的天文望远镜进行自动化程序较高的安装和组成;专利号为202011614367.4公开了一种防过压结构、夹爪结构及机械手爪,其中防过压结构连接机械臂和夹爪结构,其包括:上压板,上压板用于连接机械臂,并承受机械臂的下压力以安装物料;下托板,下托板用于连接夹爪结构,下托板通过缓冲组件与上压板活动连接,以能够接受压力而向上压板发生位移;位移检测件,位移检测件设于上压板和下托板之间,用于检测下托板相对上压板发生的位移量。另一方面,夹爪结构包括夹爪本体和上述防过压结构,夹爪本体与下托板连接。再一方面,机械手爪包括至少一组上述的夹爪结构。本发明的防过压结构、夹爪结构及机械手爪,在安装过程中能够及时反馈物料的安装状态,避免过压而损坏物料和设备。但是该设备无法对天文望远镜的镜筒进行自动的安装和组成。
发明内容
本发明的目的是提供一种适用于装卸天文望远镜的机械手,其有益效果为可以对天文望远镜的镜筒进行自动的安装和组成。
本发明的目的通过以下技术方案来实现:
本发明的目的是一种适用于装卸天文望远镜的机械手,包括调节外滑座轴、中心驱动轴和内驱动轴,所述中心驱动轴横向滑动连接在调节外滑座轴内,内驱动轴横向滑动连接在中心驱动轴内;
所述调节外滑座轴的操作端均匀铰接有用于夹紧安装望远镜目镜的外夹紧夹,外夹紧夹的内壁铰接有用于驱动和固定的外铰接杆并铰接在中心驱动轴上;
所述外夹紧夹内壁固定连接有夹槽,多个夹槽组成圆形夹槽,望远镜的目镜夹紧在圆形夹槽内;
所述用于驱动固定的中心驱动轴的操作端均匀铰接有用于夹紧安装望远镜目镜端盖的内夹紧夹的内壁铰接有用于驱动和固定的内铰接杆并铰接在内驱动轴上;
所述内夹紧夹的内壁设置有端盖夹槽,多个端盖夹槽组成圆形端盖夹槽,望远镜的目镜端盖夹紧在圆形夹槽内;
通过调节调节外滑座轴实现整个机械臂加工距离的调整,通过驱动中心驱动轴向内运动,通过外铰接杆使调节外滑座轴上的外夹紧夹则松开,反之驱动中心驱动轴向外运动,调节外滑座轴上的外夹紧夹则夹紧,内驱动轴与中心驱动轴上的内夹紧夹之间的关系与,调节外滑座轴上外夹紧夹和中心驱动轴之间的驱动关系相同,进而通过调节外滑座轴、中心驱动轴和内驱动轴之间的相互运动以及相互驱动,实现外夹紧夹与内夹紧夹的夹紧与松开,进而实现机械臂对望远镜的自动安装;
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果为天文望远镜的镜筒进行自动的安装和组成;通过自动化程序控制机械臂对镜筒两端的目镜和透镜进行自动夹取和安装;同时对目镜端盖和透镜端盖进行夹取和安装,实现对望远镜镜筒的自动化快速的安装和组成。
附图说明
图1是本发明的机械臂核心驱动夹紧结构示意图一;
图2是本发明的机械臂核心驱动夹紧结构示意图二;
图3是本发明的目镜端盖的夹紧松开的结构示意图一;
图4是本发明的目镜端盖的夹紧松开的结构示意图二;
图5是本发明的目镜的的夹紧松开的结构示意图一;
图6是本发明的目镜的的夹紧松开的结构示意图二;
图7是本发明的夹紧松开的驱动结构示意图一;
图8是本发明的夹紧松开的驱动结构示意图二;
图9是本发明的全方位角度驱动调节的结构示意图一;
图10是本发明的全方位角度驱动调节的结构示意图一;
图11是本发明的整体的结构示意图一;
图12是本发明的整体的结构示意图二;
图13是本发明的镜筒呈载运输器运输的结构示意图;
图14是本发明的镜筒的结构示意图。
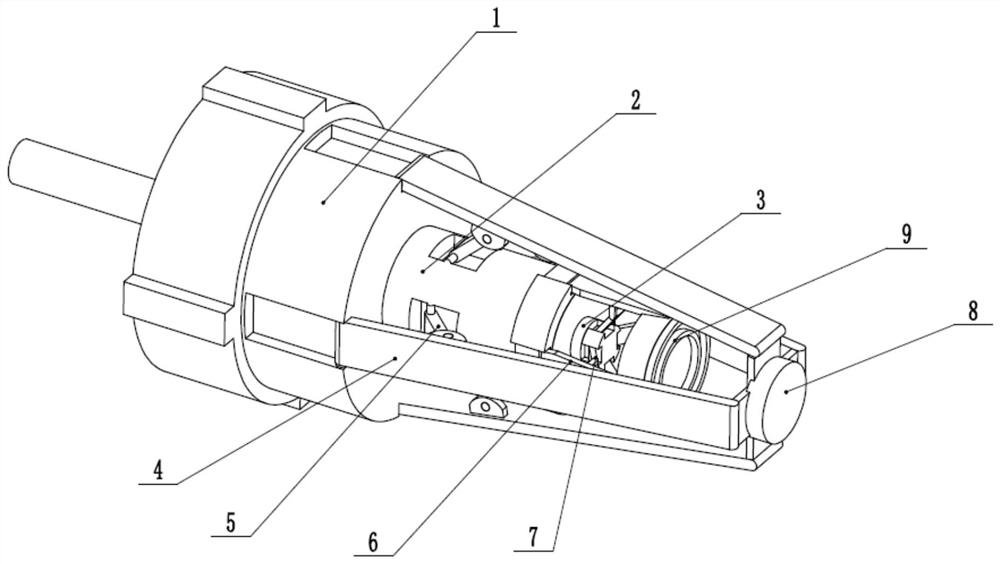
图中;调节外滑座轴1、中心驱动轴2、内驱动轴3、多个外夹紧夹4、外铰接杆5、内夹紧夹6、内铰接杆7、目镜8、目镜端盖9、内轴驱动器10、外轴驱动器11、滑动调节杆12、中心驱动筒13、两个角度调节块14、径向角度调节驱动器15、驱动转盘16、驱动转轴17、螺栓固定底座18、横向角度调节驱动器19、镜筒间歇驱动器20、镜筒呈载运输器21、镜筒22和两个物件放置台23。
具体实施方式
下面结合附图对本发明作进一步详细说明。
如这里所示的实施方式所示,
该部分根据图1、图2图3和图4所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过调节调节外滑座轴1实现整个机械臂加工距离的调整,通过驱动中心驱动轴2向内运动,通过外铰接杆5使调节外滑座轴1上的外夹紧夹4则松开,反之驱动中心驱动轴2向外运动,调节外滑座轴1上的外夹紧夹4则夹紧,内驱动轴3与中心驱动轴2上的内夹紧夹6之间的关系与,调节外滑座轴1上外夹紧夹4和中心驱动轴2之间的驱动关系相同,进而通过调节外滑座轴1、中心驱动轴2和内驱动轴3之间的相互运动以及相互驱动,实现外夹紧夹4与内夹紧夹6的夹紧与松开,进而实现机械臂对望远镜的自动安装。
结合以上实施例进一步优化:
进一步的根据图2和图3所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过调节外滑座轴1上铰接的外夹紧夹4,在中心驱动轴2向内或者向外运动时,通过外铰接杆5使铰接在调节外滑座轴1的多个外夹紧夹4进行夹紧和闭合,进而实现对望远镜目镜8的夹紧运输,和松开运输安装在镜筒22内的运动。
结合以上实施例进一步优化:
进一步的根据和图3所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过多个外夹紧夹4上多个夹槽组成圆形夹槽,对夹紧望远镜的目镜8起到更好的运输夹紧和保护的作用,进而使望远镜的目镜8可以有部分突出在圆形夹槽外,方便在安装目镜8时更好的进行插入和固定。
结合以上实施例进一步优化:
进一步的该根据图4、图5和图6所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过中心驱动轴2上均匀铰接有用于夹紧安装望远镜目镜端盖的内夹紧夹6,在内驱动轴3向内或者向外运动时,通过内铰接杆7使铰接在中心驱动轴2上的多个内夹紧夹6进行夹紧和闭合,进而实现对望远镜目镜端盖9的夹紧运输,和松开运输安装在镜筒22内的运动。
结合以上实施例进一步优化:
进一步的根据图4、图5和图6所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过多个内夹紧夹6上多个夹槽组成圆形端盖夹槽,对夹紧望远镜的目镜端盖9起到更好的运输夹紧和保护的作用,进而使望远镜的目镜端盖9可以更好的插入并封闭在镜筒22内,对目镜8进行封闭锁紧,实现对望远镜目镜8的安装。
结合以上实施例进一步优化:
进一步的根据图9和图10所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过调节旋转滑动调节杆12,进而通过螺栓调节,使调节外滑座轴1在中心驱动筒13内进行位移微调,方便在对不同样式长度的镜筒22内进行组装,进而实现对横向加工安装长度的微调,防止在安装过程中造成干涉,影响望远镜的安装。
结合以上实施例进一步优化:
进一步的根据图7和图8所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过变频器控制驱动外轴驱动器11,进而使中心驱动轴2在调节外滑座轴1内内外滑动,进而驱动调节调节外滑座轴1上的外夹紧夹4对目镜的夹紧和松开,进而配合批量放置的目镜8,将其夹紧运输至镜筒22内进行组装;通过变频器控制驱动内轴驱动器10,进而使内驱动轴3在中心驱动轴2内内外滑动,进而驱动调节中心驱动轴2上的内夹紧夹6对目镜端盖的夹紧和松开,进而配合批量放置的目镜端盖9,将其夹紧运输至镜筒22内进行组装;在物件放置台23上优先夹紧目镜端盖9在内,后夹紧目镜8在外,夹紧后,进行运输至镜筒22内,先将目镜8插入后,通过驱动中心驱动轴2向内将目镜端盖9运输至镜筒22上扣紧固定封闭目镜8的同时,调节外滑座轴1上的外夹紧夹4松开,避免在安装和夹紧过程中造成干涉。
结合以上实施例进一步优化:
进一步的根据图10所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过在底座上固定机械臂后,通过驱动调节使中心驱动筒13发生径向和横向的角度调节,同时带动内轴驱动器10和外轴驱动器11进行运动,方便驱动角度的直接驱动和调节,方便对目镜8和目镜端盖9的夹紧和放松。
结合以上实施例进一步优化:
进一步的根据图9和图10所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过中心驱动筒13下端的两个角度调节块14使径向角度调节驱动器15在受到变频器控制驱动时,使整个中心驱动筒13发生径向的角度偏移。进而使整个机械臂头可以径向位移,方便低头对备料进行寻找并夹紧运输。
结合以上实施例进一步优化:
进一步的根据图9和图10所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过螺栓固定底座18上的螺栓将机械臂进行底座固定,通过调节驱动器19的驱动使整个驱动转轴17和驱动转盘16转动,进而使径向角度调节驱动器15发生横向的角度转动,配合径向角度调节驱动器15的驱动,使整个机械臂可以多角度高自由度的运转,方便整个机械臂对望远镜的安装和运输。
结合以上实施例进一步优化:
进一步的所述机械臂设置有两个,两个机械臂分别通过螺栓固定底座18通过螺栓固定连接在地面底座板上,两个机械臂设置在镜筒呈载运输器21的两端。
该部分根据图11和图12所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过将两个机械臂堆成放置,在对镜筒22两端的目镜端和透镜端可以进行同步同时的加工,通过对称产生的相对相同的力,防止在安装过程中镜筒22发生偏移,进而使望远镜的安装更为整体性,镜筒22的组装更为安全和迅速。
结合以上实施例进一步优化:
进一步的所述镜筒呈载运输器21上并排设置有镜筒22,镜筒呈载运输器21通过镜筒间歇驱动器20间歇运输在两个机械臂之间。
该部分根据图13所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过镜筒间歇驱动器20的驱动,使镜筒呈载运输器21间歇性的运输,当停止时,通过两个机械臂将物件放置台23上的目镜、目镜端盖、透镜和透镜端盖安装在镜筒22的两端,使镜筒22可以实现自动快速的自动化的安装;安装完成后镜筒呈载运输器21运动,如此往复。
结合以上实施例进一步优化:
进一步的所述镜筒呈载运输器21的两端分别设置有两个物件放置台23固定连接在地面上,左侧的物件放置台23上放置有目镜8和目镜端盖9,右侧的物件放置台23上放置有透镜和透镜端盖。
该部分根据图11和图12所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过在物件放置台23上放置的有目镜8、目镜端盖9、透镜和透镜端盖,通过自动化程序控制驱动连个机械臂同步运动,将目镜8、目镜端盖9、透镜和透镜端盖依次夹紧运输至镜筒22内进行安装,进而实现对望远镜镜筒的自动化安装和组成。
结合以上实施例进一步优化:
进一步的所述镜筒22的两端分别设置有目镜8放置槽和透镜放置槽。
该部分根据图14所示的一种适用于装卸天文望远镜的机械手示例的工作过程是:
通过镜筒22的两端分别设置的目镜8放置槽和透镜放置槽,将目镜8和透镜插入松开后,进行限定,在依次将目镜端盖9和透镜端盖叩在镜筒22上对目镜8和透镜进行封闭安装。
- 一种适用于装卸天文望远镜的机械手
- 一种适用于机械手装卸的小型片状样品拉伸卡具