一种使用4线激光测距仪测量车辆姿态的算法与系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及停车管理技术领域,具体为一种使用4线激光测距仪测量车辆姿态的算法与系统。
背景技术
国外目前已经出现停车场全自动管理系统,用户只需要将车辆停在公共停车位上,自动拖车会处理后续的泊车环节,做到停车位高效规划与利用,但是每个用户将车辆停在公共停车位上后,车辆的型号、大小以及姿态都不相同,而现有的自动管理系统缺乏对不同状态的车辆进行姿态计算的算法,无法根据不同车辆实时调整自动拖车的大小以及状态,容易导致拖车无法与公共停车位上的车辆完美配合,不利于自动停车,为此我们提出一种使用4线激光测距仪测量车辆姿态的算法与系统用于解决上述问题。
发明内容
本发明的目的在于提供一种使用4线激光测距仪测量车辆姿态的算法与系统,以解决上述背景技术中提出的问题。
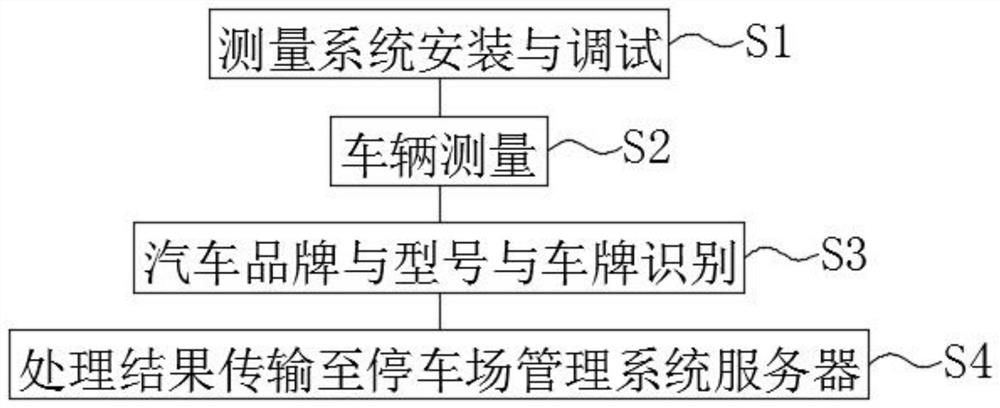
为实现上述目的,本发明提供如下技术方案:一种使用4线激光测距仪测量车辆姿态的算法,包括如下步骤:
S1、测量系统安装与调试
S101、利用角尺与卷尺在地面勾画4米宽*6米长的矩形,并沿顺时针方向将矩形的四个顶点设为A、B、C、D坐标点;
S102、以A与C点为激光雷达扫描中心点,在B点和D点,摆放中心点在B点和D点10厘米高截面为0.5厘米宽正方形的立柱,并以立柱为参考对激光雷达进行调整;
S103、绘制内部矩形,以2.5m*5m绘制,内部矩形中心与外部矩形中心重合,纵向中心轴重合,最终,将内部矩形长与宽输入系统;
S2、车辆测量
S201、以AB之间的外矩形边为1号扫描面,按顺时针排序,另外三条矩形边依次为2、3、4号扫描面,激光雷达以1s/次的频率进行循环扫描;
S202、如果测量中水平的2号扫描面的数据中发现轮子形状,则提示有车辆入场;
S203、如果5次采集的数据不重合,则判断车辆未停稳,反之,判断车辆已经停稳,并开始测量车辆姿态;
S204、将2、3、4号扫描面的数据均投影到水平面,获得车辆的外观数据,采用矩形包络,且矩形面积最小为目标函数,计算车的长宽以及与长边的偏角;
S3、汽车品牌与型号与车牌识别系统:使用神经网络深度学习方法,使用图像辨识技术识别车辆品牌和型号;
S4、采用定制协议,将车辆姿态打包传送给后端服务器,前端的用户信息采集系统填写车辆号码,入库时间等,同时发给停车场管理系统服务器进行存储保留。
优选的一种实施案例,步骤S101中,激光雷达进行调整的方法包括:
1)、调节A点激光排放位置,保证0度读取到D点立柱,值为4m±1cm,90度读取到B点立柱,值为6m±1cm;
2)、调节C点激光排放位置,保证0度读取到B点立柱,值为4m±1cm,90度读取到D点立柱,值为6m±1cm;
3)、调节A点激光雷达3个底座螺丝,保证水平仪放置在雷达顶面水平,同时可以读取到B点立柱数据,更换9.5cm高的立柱,则读取不到;C点雷达相同处理。
优选的一种实施案例,步骤S204中,所述计算车的长宽以及与长边的偏角的方法为利用2号扫描面获得前后2个轮胎外轮廓在水平面投影的数据,利用与测量车体外观相同的矩形计算方法,计算轮胎在10cm的截面矩形长度,再利用弦与直径的关系,计算出轮胎的直径,计算得到轮距,前轮距车头,后轮距车尾的距离。
优选的一种实施案例,计算出轮胎的直径的具体方法如下:通过2号扫描面获得轮胎在10cm高度的截面矩形长度,即轮胎圆形的弦长L,则轮胎半径R与弦长l的关系为
优选的一种实施案例,所述轮距,前轮距车头,后轮距车尾的距离的距离通过激光雷达进行测距得到,C点的激光雷达测得车头距离和偏角分别为L
优选的一种实施案例,步骤S6中,通过神经网络深度学习进行图像辨识的方法包括:
先从图像的样本集中生成训练集和测试集,利用训练集进行模型训练,其中模型训练经过卷积层、池化层、全连接层的中间层,生成的图像识别模型能够对车型标识、车牌0-9的数字,字母,省份简称进行识别;
然后将采集的车辆图像对图像进行预处理,基于车牌颜色的粗筛选和基于车牌纹理的细筛选进行车牌定位,并裁剪出车牌图像;
对裁剪出的车牌图像进行灰度化、均值滤波、降噪的预处理,提取出图像的边缘,用于选出车牌和车标纹理区域;然后利用训练好的基于神经网络的识别模型对已分割的车牌和车标图像字符进行识别;
一种使用4线激光测距仪测量车辆姿态的系统,包括:
采集模块,所述采集模块用于采集公共停车场停车区域内的车辆数据信息;
计算模块,所述计算模块用于根据采集模块采集的数据计算车体与姿态;
识别模块,所述识别模块用于根据采集数据识别车辆品牌、型号与车牌信息;
前端服务器,所述前端服务器用于每个停车区域的数据采集和处理,并将处理结果发送至停车场管理系统服务器;
停车场管理系统服务器,所述停车场管理系统服务器用于接收整个停车场的前端服务器发送的处理数据,并分类存储。
优选的一种实施案例,所述采集模块包括安装在停车区域处的摄像头以及激光雷达,用于采集车辆数据。
优选的一种实施案例,所述计算模块在用户下车后,通过摄像头采集的图像信息判断车门是否处于打开状态,并提示用户及时关门。
与现有技术相比,本发明的有益效果是:通过建立精确的采集模块调试方法,从而将进入停车位的车辆信息进行精确采集,通过计算模块计算得出车辆长宽、轮胎大小等数据,以及车辆停止后的偏角姿态信息,便于系统调整拖车大小以及托运时的状态,实现车辆精准托运,从而实现自动停车管理,并通过图像识别方式自动识别车辆品牌与车牌,实现车辆信息自动登记的目的,全面提高自动停车效率,方法简便实用,具有推广价值。
附图说明
图1为本发明算法流程图;
图2为本发明公共停车位处采集模块调试结构示意图;
图3为本发明系统示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-3,本发明提供一种技术方案:一种使用4线激光测距仪测量车辆姿态的算法,包括如下步骤:
S1、测量系统安装与调试
S101、利用角尺与卷尺在地面勾画4米宽*6米长的矩形,并沿顺时针方向将矩形的四个顶点设为A、B、C、D坐标点;
S102、以A与C点为激光雷达扫描中心点,在B点和D点,摆放中心点在B点和D点10厘米高截面为0.5厘米宽正方形的立柱,并以立柱为参考对激光雷达进行调整;
S103、绘制内部矩形,以2.5m*5m绘制,内部矩形中心与外部矩形中心重合,纵向中心轴重合,最终,将内部矩形长与宽输入系统;
S2、车辆测量
S201、以AB之间的外矩形边为1号扫描面,按顺时针排序,另外三条矩形边依次为2、3、4号扫描面,激光雷达以1s/次的频率进行循环扫描;
S202、如果测量中水平的2号扫描面的数据中发现轮子形状,则提示有车辆入场;
S203、如果5次采集的数据不重合,则判断车辆未停稳,反之,判断车辆已经停稳,并开始测量车辆姿态;
S204、将2、3、4号扫描面的数据均投影到水平面,获得车辆的外观数据,采用矩形包络,且矩形面积最小为目标函数,计算车的长宽以及与长边的偏角;
S3、汽车品牌与型号与车牌识别:使用神经网络深度学习方法,使用图像辨识技术识别车辆品牌和型号;
S4、采用定制协议,将车辆姿态打包传送给后端服务器,前端的用户信息采集系统填写车辆号码,入库时间等,同时发给停车场管理系统服务器进行存储保留。
进一步的,步骤S101中,激光雷达进行调整的方法包括:
1)、调节A点激光排放位置,保证0度读取到D点立柱,值为4m±1cm,90度读取到B点立柱,值为6m±1cm;
2)、调节C点激光排放位置,保证0度读取到B点立柱,值为4m±1cm,90度读取到D点立柱,值为6m±1cm;
3)、调节A点激光雷达3个底座螺丝,保证水平仪放置在雷达顶面水平,同时可以读取到B点立柱数据,更换9.5cm高的立柱,则读取不到;C点雷达相同处理。
进一步的,步骤S204中,计算车的长宽以及与长边的偏角的方法为利用2号扫描面获得前后2个轮胎外轮廓在水平面投影的数据,利用与测量车体外观相同的矩形计算方法,计算轮胎在10cm的截面矩形长度,再利用弦与直径的关系,计算出轮胎的直径,计算得到轮距,前轮距车头,后轮距车尾的距离。
进一步的,计算出轮胎的直径的具体方法如下:通过2号扫描面获得轮胎在10cm高度的截面矩形长度,即轮胎圆形的弦长L,则轮胎半径R与弦长l的关系为
进一步的,轮距,前轮距车头,后轮距车尾的距离的距离通过激光雷达进行测距得到,C点的激光雷达测得车头距离和偏角分别为L
进一步的,步骤S6中,通过神经网络深度学习进行图像辨识的方法包括:
先从图像的样本集中生成训练集和测试集,利用训练集进行模型训练,其中模型训练经过卷积层、池化层、全连接层的中间层,生成的图像识别模型能够对车型标识、车牌0-9的数字,字母,省份简称进行识别;
然后将采集的车辆图像对图像进行预处理,基于车牌颜色的粗筛选和基于车牌纹理的细筛选进行车牌定位,并裁剪出车牌图像;
对裁剪出的车牌图像进行灰度化、均值滤波、降噪的预处理,提取出图像的边缘,用于选出车牌和车标纹理区域;然后利用训练好的基于神经网络的识别模型对已分割的车牌和车标图像字符进行识别;
一种使用4线激光测距仪测量车辆姿态的系统,包括:
采集模块,采集模块用于采集公共停车场停车区域内的车辆数据信息;
计算模块,计算模块用于根据采集模块采集的数据计算车体与姿态;
识别模块,识别模块用于根据采集数据识别车辆品牌、型号与车牌信息;
前端服务器,前端服务器用于每个停车区域的数据采集和处理,并将处理结果发送至停车场管理系统服务器;
停车场管理系统服务器,停车场管理系统服务器用于接收整个停车场的前端服务器发送的处理数据,并分类存储。
进一步的,采集模块包括安装在停车区域处的摄像头以及激光雷达,用于采集车辆数据。
进一步的,计算模块在用户下车后,通过摄像头采集的图像信息判断车门是否处于打开状态,并提示用户及时关门。
工作原理:本发明通过建立精确的采集模块调试方法,从而将进入停车位的车辆信息进行精确采集,通过计算模块计算得出车辆长宽、轮胎大小等数据,以及车辆停止后的偏角姿态信息,便于系统调整拖车大小以及托运时的状态,实现车辆精准托运,从而实现自动停车管理,并通过图像识别方式自动识别车辆品牌与车牌,实现车辆信息自动登记的目的,全面提高自动停车效率。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种使用4线激光测距仪测量车辆姿态的算法与系统
- 一种线激光装置自身姿态位置自动检测测量方法