基于视觉的飞机海上平台着陆飞行视景仿真系统及方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及飞机着陆飞行视景仿真系统及实现方法,尤其涉及一种基于视觉的飞机海上平台着陆飞行视景仿真系统及实现方法。
背景技术
计算机视觉是光学、计算机科学和仿生学等学科交叉的产物,是一种包含丰富信息的无源的信息源,利用计算机视觉信息实现飞机的自主导航成为研究的热点。飞机的计算机视觉导航以机载摄像机拍摄到的实时图像为导航信息来源,通过一系列处理计算载体实时的运动参数,进而为控制系统提供所需的导航参数。摄像机是相对低成本的信息源,同时能够提供丰富的环境信息。相对其他导航方式,基于视觉的自主导航技术提供的信息量大,不依赖外界的导航设备,自主化程度得到提高,在电子对抗中取得了较大的优越性,所以国内外对飞行器着陆以及着陆导航技术的研究越来越多依靠计算机视觉来完成。
获取准确、高精度着陆过程的姿态信息是飞机安全降落的关键,而姿态信息是由导航系统所提供。现有的导航技术包括惯性导航、雷达导航、GPS导航等。现有的导航技术存在着一些问题:惯性导航对惯性元件的要求较高,且误差会逐渐增大;雷达导航的定位精度受限于雷达,且需采用雷达回收站,费用将增加;GPS导航是目前应用最广泛的导航方式,但由于GPS借助卫星定位,容易受到电子的干扰;而视觉导航作为一种新型导航技术,因其不受地形干扰、精度高、自主化程度高、成本较低等优点,得到人们广泛的关注,并得到不断的发展。同时,在不同的需求和环境下,不同的引导技术具备各自的优势和缺陷,若能根据飞机着陆是不同的距离、环境甚至是故障,对多源的引导体制的数据进行融合,发挥出各种引导体制的优势,显然对于提高飞机着陆的精度、效率和安全性有着重要的意义。
现有的飞机海上移动平台降落仿真很少将视觉引导作为引导着陆的一环,同时,飞机海上移动平台降落仿真普遍存在环境真实性低的问题,缺乏环境真实的飞机海上平台着陆整体闭环系统。
发明内容
发明目的:本发明的目的是提供一种采用视觉导航、仿真环境真实性高的基于视觉的飞机海上平台着陆飞行视景仿真系统和方法。
技术方案:本发明的飞机海上平台着陆飞行视景系统,其特征在于,包括基于PID控制的飞机着陆控制系统、视景仿真系统和基于卡尔曼滤波的数据融合系统;所述飞机着陆控制系统的输出参数传输给视景仿真系统;通过视景仿真系统建立飞机模型和渲染画面,得到视觉解算数据;所述数据融合系统将视觉解算数据和飞机模型中的传感器数据进行融合,融合后的飞机飞行状态量传输给飞机着陆控制系统;
所述飞机着陆控制系统的将舵面和油门参数传输给飞机模型。
进一步,飞机着陆控制系统包括航迹规划模块、控制器模块和执行机构模块,航迹规划模块的输出端连接控制器模块的输入端,控制器模块的输出端连接执行机构模块的输入端,执行机构模块的输出端与飞机模型的输入端连接;控制器模块包括纵向控制律模块与横向控制律模块;
航迹规划模块中写入预设的飞行轨迹,在飞行过程中对比飞机真实状态,给出飞行指令;
纵向控制律模块包括姿态控制器和轨迹控制器,纵向控制器的输入参数为俯仰角和俯仰角速率,纵向控制器的输出端连接视景仿真软件的输入端;
横向控制律模块包括滚转姿态控制器、航向控制器和侧向偏离控制器;横向控制律模块的输入参数为偏航角速率、侧滑角、滚转角速率和滚转角;横向控制律模块的输出信号为升降舵偏转量、方向舵偏转量和副翼舵偏转量,传输给飞机的舵面;横向控制律模块的输出端连接视景仿真软件的输入端。
进一步,所述视景仿真系统包括视景展示模块和飞机位姿解算模块;
视景展示模块的输入参数为升降舵偏转量、方向舵偏转量和副翼舵偏转量,来自飞机着陆控制系统中的飞机模型参数;根据舵机与油门输入,结合飞机当前状态,完成飞机状态变量的更新,进而更新视景画面,同时向数据融合系统输出GPS和惯导飞行传感器值;
飞机位姿解算模块的输入为视景展示模块渲染出的画面,经过海上平台目标识别,框选出画面中平台的位置;提取平台上的特征,根据特定的点、线特征完成飞机位姿解算,输出海上平台与飞机的相对位置与姿态关系。
进一步,所述数据融合系统的输入为视景仿真系统的输出,将GPS、惯导飞行传感器值和计算机视觉解算出的舰机相对位置与姿态信息通过卡尔曼滤波的方式进行融合,并将输出反馈到飞机着陆控制系统中。
一种基于视觉的飞机海上平台着陆飞行视景仿真系统的方法,包括步骤:
(1)建立飞机着陆控制系统模型,所述飞机着陆控制系统模型包括纵向控制系统控制律和横向控制系统控制律;
纵向控制系统控制律如下:
δ
其中,K
横侧向控制系统控制律如下:
δ
其中,K
(2)建立视景仿真系统模型,选用视景仿真软件的UDP传输模块和可视化仿真工具的UDP传输模块结合,实现飞机着陆控制系统与视景仿真系统的实时通讯;通过Simulink将舵面和油门的信息输入到视景仿真软件中,由视景仿真软件完成对飞机状态的输出反馈到Simulink中,实现步骤如下:
(s21)视景仿真软件通过UDP通信协议来进行数据传输,在simulink中通过UDP传输模块将视景仿真系统的IP地址与端口填入;
(s22)数据打包,输出数据为16进制数,每一帧数据的输出由报头与数据区组成,消息头、子帧数据和子帧号组成数据区;
(s23)数据解压,视景仿真系统的输出为打包好的数据,按照步骤(s22)的规则,将视景仿真系统输出的数据包进行读取并存储,以供后续的数据融合模块的使用;
(s24)采用基于模板图片匹配的海上平台目标识别方法,在识别平台的基础上,通过提取海上平台的某些线性特征,进而求解出飞机相对海上平台的位姿信息作为着陆引导信息使用;
(3)建立数据融合系统模块;将视景仿真系统提供的位姿信息和飞机惯导输出的位姿信息提供给滤波器,应用卡尔曼滤波方法进行信息处理,得出系统状态的最优估计值。
进一步,所述步骤(s24)中,所述平台目标识别方法是通过采集实时输出图像中与已有的海上平台图像的特征点,进行特征点匹配,框选出海上平台在海面上的位置;
在获得海上平台合作目标图像的点特征和对应的空间位置坐标后,利用PnP算法模型计算飞机与海上平台甲板的位姿参数。
本发明与现有技术相比,其显著效果如下:1、将计算机视觉引导应用到飞机着陆飞行控制场景中,使用多源数据融合方式完成对多传感器数据的融合,实现视景仿真软件真实还原飞机着陆过程;2、对视觉引导着陆,采用基于模板图片匹配的海上平台目标识别方法,在识别平台的基础上,通过提取平台上的某些线性特征,进而求解出飞机相对平台的位姿信息作为着陆引导信息使用;3、提出了一种基于卡尔曼滤波的多源着陆引导信息融合系统;4、本发明搭建完成后,开源性好,项目延伸方式多样,为飞行控制方法研究提供更真实、现代的仿真系统。
附图说明
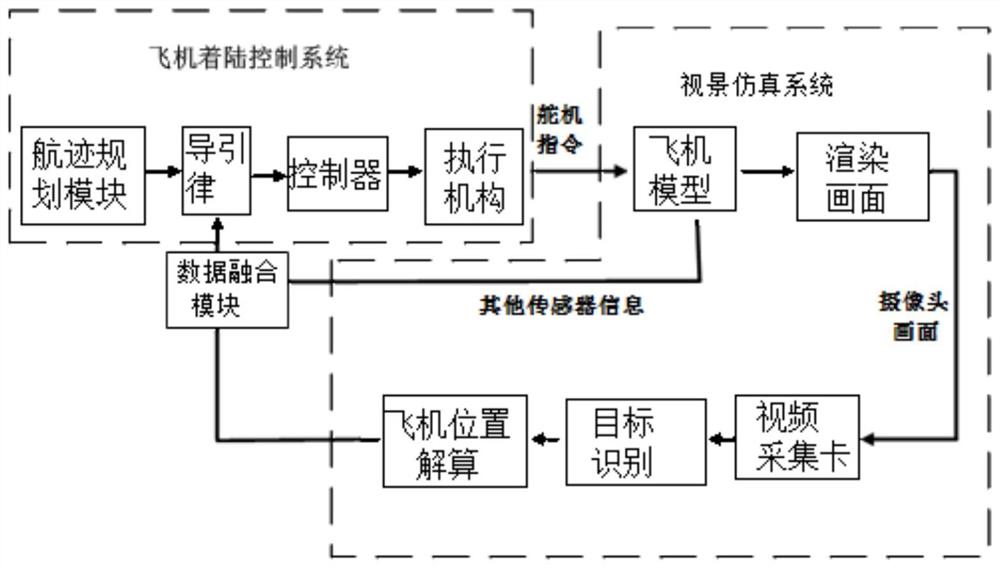
图1为本发明的系统原理示意图。
具体实施方式
下面结合说明书附图和具体实施方式对本发明做进一步详细描述。
如图1所示为本发明的系统原理示意图。本发明将飞机模型建模到视景仿真软件中,以利用视景仿真软件中真实的外界物理环境。使用视景仿真软件渲染的画面进行平台的识别与飞机相对位姿解算,将视觉解算数据同视景仿真软件输出的其他传感器数据进行融合,以供引导律模块生成引导指令。针对受到未知外界扰动的飞机,设计PID控制律,实现飞机跟踪指令准确下滑并在平台指定位置着陆。
本发明的飞机海上平台着陆飞行视景仿真系统,包括基于PID控制的飞机自动着陆控制系统、基于X-plane的视景仿真系统和基于卡尔曼滤波的数据融合系统。飞机着陆控制系统的输入信号是来自数据融合系统的飞行状态量,输出是舵面、油门信号,并传输给飞机。
飞机着陆控制系统包括航迹规划模块、控制器模块和执行机构模块,其功能是实现对飞机模型进行控制,使飞机按照期望轨迹和期望姿态进行下滑着陆任务。航迹规划模块中写入预设的飞行轨迹,在飞行过程中对比飞机真实状态,给出飞行指令。控制器模块的主要包括纵向控制律模块与横向控制律模块:
纵向控制律模块主要由姿态控制器、轨迹控制器组成。纵向控制模块的参数设置要保证飞机进入下滑道的同时要时刻与斜甲板中心线对齐;纵向控制器的输入参数为俯仰角、俯仰角速率,纵向控制器输出端连接视景仿真软件的输入端。
横向控制律模块主要由滚转姿态控制器、航向控制器和侧向偏离控制器组成。横向控制律模块的输入参数为偏航角速率、侧滑角、滚转角速率、滚转角,来自飞机模型的输出端;横向控制律模块的输出信号为升降舵偏转量、方向舵偏转量、副翼舵偏转量,传输给飞机的舵面,即视景仿真软件的输入端。
视景仿真系统包括视景展示模块与飞机位姿解算模块。视景展示模块的输入参数为升降舵偏转量、方向舵偏转量、副翼舵偏转量,来自飞机着陆控制系统中的飞机模型参数;根据舵机与油门输入,结合飞机当前状态,完成飞机状态变量的更新,进而更新视景画面,同时向数据融合系统输出GPS、惯导等飞行传感器的值。飞机位姿解算模块输入为视景展示模块渲染出的画面,经过海面平台目标识别,框选出画面中平台的位置;飞机视觉位姿解算提取平台上的特征,根据特定的点、线特征完成飞机位姿解算,视景仿真系统输出平台与飞机的相对位置与姿态关系。
数据融合系统的输入为视景仿真系统的输出,将GPS、惯导飞行传感器的值、计算机视觉解算出的舰机相对位置和姿态信息通过卡尔曼滤波的方式进行融合,并将输出反馈到飞机着陆控制系统中,形成整体闭环。
飞机要通过着陆控制系统准确地降落在海上平台甲板的阻拦区域内,必须对下滑轨迹进行精确控制。本发明的飞机着陆飞行视景仿真系统主要是通过升降舵通道,对飞机短周期运动姿态进行控制,来改变飞机的下滑轨迹,并按预定的下滑轨迹进行降落。同时由发动机推力补偿系统控制飞机的迎角和速度,以确保下滑期间飞机运动的稳定性并保持航迹角不变。本发明的飞机着陆飞行视景仿真系统的实现过程如下:
(一)飞机着陆控制系统模型的建立
为了使飞机能快速、精确地跟踪下滑道高度指令,所以要进行纵向控制律设计。纵向控制系统主要通过自动调节升降舵的偏转来控制飞机短周期的运动姿态,改变飞机的下滑轨迹,并按预定的下滑轨迹着陆。
纵向控制系统控制律如下:
δ
公式(1)、(2)中,K
横侧向控制系统控制律如下:
δ
公式(3)中,K
公式(4)中,
公式(5)中,K
(二)视景仿真系统模型的建立
本发明的采用X-plane11飞行仿真软件作为视景仿真系统的依托,基于X-Plane11的视景仿真着陆控制系统。为充分利用X-Plane11建模精度高、大气环境真实的优势,选择与以往视景仿真系统不同的控制策略,通过Simulink输入舵面、油门等信息到视景仿真软件中,由视景仿真软件完成对飞机状态的输出反馈到Simulink中。
使用X-plane11的UDP传输功能以及simulink的UDP传输模块,实现控制系统与视景仿真系统的实时通讯。实现步骤如下:
(s21)视景仿真软件通过UDP通信协议来进行数据传输,在控制系统(simulink软件中)中使用UDP传输模块,将视景仿真系统的IP地址与端口填入。
(s22)数据打包,输出数据为16进制数,每一帧数据的输出由报头与数据区组成,消息头、子帧数据和子帧号组成数据区,。如表1所示,“DATA”这四个字节为消息头,用来判别每一条消息的开始;I作为第五个字节是内部码;紧接着的四个字节为子帧号(L1,L2,L3,L4),代表飞行参数的位置;8个参数组成一个子帧数据,用空格填补参数之间的空缺。
表1 X-Plane仿真软件输出数据表
(s23)数据解压,视景仿真系统的输出也是打包好的数据,按照步骤S22的规则,将视景仿真系统输出的数据包进行读取并存储,以供后续的数据融合模块的使用。
(s24)视觉引导着陆,本发明采用基于模板图片匹配的海上平台目标识别方法,在识别平台的基础上,通过提取平台上的某些线性特征,进而求解出飞机相对平台的位姿信息作为着陆引导信息使用。
海上平台目标识别方法为基于特征的识别,通过采集实时输出图像中与已有的平台图像的SURF(Speeded-Up Robust Features)特征点,进行特征点匹配,框选出平台在海面上的位置;对框选出的图像进行霍夫直线识别,识别出着陆区域的两条跑道边线。根据识别出的两条直线的四个端点,选用PNP(Perspective-n-Point)算法求解,即在获得着陆跑道四个端点在图像坐标系中的坐标以及对应的三维空间位置坐标后,利用PnP算法模型计算飞机与舰船甲板的位姿参数。其中,PNP算法是利用4个已知点的位置,利用投影关系通过几何计算得到位姿信息。
(三)数据融合系统模块
数据融合模块采用卡尔曼滤波的方式进行数据融合,卡尔曼滤波是一种最优估计方法,能使估计误差的方差最小。把视景仿真系统提供的位姿信息与飞机惯导输出的位姿信息提供给滤波器,应用卡尔曼滤波方法进行信息处理,继而得出系统状态的最优估计值。
本发明将计算机视觉引导使用到飞机海上平台着陆这一特殊飞行控制场景中,使用数据融合方式完成对传感器数据的融合,使用较为先进的视景仿真软件真实还原飞机机着陆。本发明系统搭建完成后,开源性好,项目延伸方式多样,为飞行控制方法研究提供更真实、现代的仿真平台。
- 基于视觉的飞机海上平台着陆飞行视景仿真系统及方法
- 一种基于视觉的雾天飞机自主着陆方法及系统