多机器人任务分配的“协商-决策”市场拍卖求解方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及机器人任务分配技术领域,特别是涉及一种多机器人任务分配的“协商-决策”市场拍卖求解方法。
背景技术
对机器人解决日益复杂和多样化问题的需求日益增长,这决定了单个机器人不再是最佳解决方案;同时,机器人团队必须智能协调以成功执行任务。在这些需求的驱动下,许多研究工作集中在多机器人协调的挑战上,多机器人任务分配问题便是其中一种。
近年来,基于协商和基于市场的多机器人协调方法得到了广泛的应用。简单来说,可以将其理解为“拍卖”。首先,拍卖机器人向团队中的其他机器人发布任务信息,并请求投标;然后,团队中的每个机器人都根据自己的执行能力准备投标任务,然后将出价转发给拍卖机器人;最后,拍卖机器人将任务分配给拍价最高的机器人。
在此基础上,可以设想一种基于自由市场的协调方法,与传统市场方法不同的是,允许机器人间进行协商,即它们可以在任务分配结束后再次竞争与合作,互利互惠,合作共赢,最大化整体的利益。这就是所谓的“协商”。
在基于自由市场的基础上,还可以设想团队中有一位“决策者”,决策者可以通过交流或某种形式的观察了解团队的当前状态,最后决定最终的方案。这就是所谓的“决策”。
因此,目前亟需一种能够对目标任务进行低成本、高民主分配的拍卖求解方法。
发明内容
本发明的目的是提供一种多机器人任务分配的“协商-决策”市场拍卖求解方法,以解决上述现有技术存在的问题,采用改进的拍卖求解方法对目标任务进行低成本、高民主的分配。
为实现上述目的,本发明提供了如下方案:本发明提供一种多机器人任务分配的“协商-决策”市场拍卖求解方法,通过以下步骤实现:
步骤S1:初始化信息;
步骤S2:宣布任务区域信息以及对应成本,等待报价;
步骤S3:对各任务区域分别报价;
步骤S4:以任务区域为单位,根据各报价确定优先级;
步骤S5:随机选择一个任务区域,并由最高优先级拍得;
步骤S6:在余下的任务区域中再次随机选择一个任务区域,并重复所述步骤S5中的过程,直至所有任务区域均被分配;
步骤S7:在达成转接条件下,将拍得的任务区域转接协商,所述转接条件依托于互利;
步骤S8:重复所述步骤S7,直至无法达成转接条件,协商结束,每个任务区域转接后的总报价向上汇报;
步骤S9:比较每次的总报价,保留其中最少的一次,对应的各任务区域分配方法即为最终的分配方法。
优选的,所述步骤S3中,报价在成本价的85%至115%间确定。
优选的,所述步骤S4中,成本价的85%至100%代表对该任务区域的意愿度较低,则优先级较低;成本价的100%至115%代表对该任务区域的意愿度较高,则优先级较高;以任务区域为单位,报价越高将获得更高的优先级。
优选的,所述步骤S7中,所述转接条件为售价处于拍价的85%至100%,且购价应高于其初始对该任务区域的报价。
一种多机器人任务分配的“协商-决策”市场拍卖求解系统,包括:决策单元、多个协作单元、多个任务区域单元、初始化单元、数据传输单元、盈亏计算单元、确定报价单元、优先级确定单元、优先级比较单元、分配单元、转接协商单元、转接条件判断单元、总报价比较单元;
所述决策单元通过所述初始化单元对所述协作单元的信息以及所述任务区域单元的信息进行初始化;
所述决策单元通过所述数据传输单元将所述任务区域单元的信息以及对应成本传输至所述协作单元,并等待所述协作单元报价;
所述协作单元通过所述盈亏计算单元计算盈亏,并将计算结果传输至所述确定报价单元以确定对每个所述任务区域单元报价;
所述确定报价单元将各个报价信息传输至所述决策单元收集,所述决策单元通过所述优先级确定单元确定所述协作单元对每个所述任务区域单元报价的优先级;
所述决策单元通过所述分配单元随机选取一个任务区域单元,通过所述优先级比较单元确定对所述任务区域单元报价优先级最高的协作单元,并通过所述分配单元将所述任务区域单元分配至所述协作单元;
所述决策单元通过所述分配单元将所有的所述任务区域单元均分配至所述协作单元;
每个所述协作单元依次将分配的所述任务区域单元通过所述转接协商单元提供给其他的所述协作单元,并利用所述转接条件判断单元确定所述转接协商单元是否进行转接;
所述决策单元比较每次的总报价,并保留其中最少的一次。
优选的,所述确定报价单元在成本价的85%至115%间报价;成本价的85%至100%代表所述协作单元希望通过付出低于成本的出价获得所述任务区域单元,即对所述任务区域单元的意愿度较低;成本价的100%至115%代表所述协作单元希望通过付出高于成本的出价获得所述任务区域单元,即对所述任务区域单元的意愿度较高。
优选的,所述转接条件判断单元判定的转接条件为售价处于拍价的85%至100%,且最终购入该任务区域单元的协作单元购价应高于该协作单元初始拍卖中对该任务区域单元的报价。
优选的,所述转接协商单元中储存的总报价信息专递至所述决策单元,所述决策单元通过所述总报价比较单元比较每次的总报价。
本发明公开了以下技术效果:采用本方法能够使团队中的机器人可以自主协商,对初始分配的任务进行转接,拍卖机器人可以对每次协商转接后的总成本进行比较,最终选择成本最低的方案。这样的任务分配方法容易被执行,对团队的总成本降低也有很好的效果。本发明采用改进的拍卖求解方法,实现了对目标任务进行低成本、高民主的分配。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为实施例中多机器人任务分配的“协商-决策”市场拍卖求解方法的流程图;
图2为实施例中应用场景示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明提供一种多机器人任务分配的“协商-决策”市场拍卖求解方法,可针对多种应用场景,其通过以下步骤实现:
步骤S1:初始化团队机器人及任务区域的信息;
步骤S2:拍卖机器人作为决策,向团队机器人宣布任务区域信息以及对应成本,等待报价;
步骤S3:团队机器人对各任务区域分别报价;
步骤S4:以任务区域为单位,拍卖机器人根据各报价确定优先级;
步骤S5:拍卖机器人随机选择一个任务区域,并由最高优先级的团队机器人拍得;
步骤S6:拍卖机器人在余下的任务区域中再次随机选择一个任务区域,并重复步骤S5中的过程,直至所有任务区域均被分配;
步骤S7:在达成转接条件下,将拍得的任务区域转接协商,转接条件依托于互利;
步骤S8:重复步骤S7,直至无法达成转接条件,协商结束,每个任务区域转接后的总报价向拍卖机器人汇报;
步骤S9:拍卖机器人比较每次的总报价,保留其中最少的一次,对应的各任务区域分配方法即为最终的分配方法。
进一步优化方案,步骤S3中,报价在成本价的85%至115%间确定。
进一步优化方案,步骤S4中,成本价的85%至100%代表对该任务区域的意愿度较低,则优先级较低;成本价的100%至115%代表对该任务区域的意愿度较高,则优先级较高;以任务区域为单位,报价越高将获得更高的优先级。
进一步优化方案,步骤S7中,转接条件为售价处于拍价的85%至100%,最终购入该任务区域的机器人购价应高于该机器人初始拍卖中对该区域的报价。
本发明基于上述方法,提供了一种多机器人任务分配的“协商-决策”市场拍卖求解系统,包括:决策单元、多个协作单元、多个任务区域单元、初始化单元、数据传输单元、盈亏计算单元、确定报价单元、优先级确定单元、优先级比较单元、分配单元、转接协商单元、转接条件判断单元、总报价比较单元;
决策单元通过初始化单元对协作单元的信息以及任务区域单元的信息进行初始化;
决策单元通过数据传输单元将任务区域单元的信息以及对应成本传输至协作单元,并等待协作单元报价;
协作单元通过盈亏计算单元计算盈亏,并将计算结果传输至确定报价单元以确定对每个任务区域单元报价;
确定报价单元将各个报价信息传输至决策单元收集,决策单元通过优先级确定单元确定协作单元对每个任务区域单元报价的优先级;
决策单元通过分配单元随机选取一个任务区域单元,通过优先级比较单元确定对任务区域单元报价优先级最高的协作单元,并通过分配单元将任务区域单元分配至协作单元;
决策单元通过分配单元将所有的任务区域单元均分配至协作单元;
每个协作单元依次将分配的任务区域单元通过转接协商单元提供给其他的协作单元,并利用转接条件判断单元确定转接协商单元是否进行转接;
决策单元比较每次的总报价,并保留其中最少的一次,对应的各任务区域分配方法即为最终的分配方法。
进一步优化方案,确定报价单元在成本价的85%至115%间报价;成本价的85%至100%代表协作单元希望通过付出低于成本的出价获得任务区域单元,即对任务区域单元的意愿度较低;成本价的100%至115%代表协作单元希望通过付出高于成本的出价获得任务区域单元,即对任务区域单元的意愿度较高。
进一步优化方案,转接条件判断单元判定的转接条件为售价处于拍价的85%至100%,且最终购入该任务区域单元的协作单元购价应高于该协作单元初始拍卖中对该任务区域单元的报价。
进一步优化方案,转接协商单元中储存的总报价信息专递至决策单元,决策单元通过总报价比较单元比较每次的总报价。
实施例
参照图1-2,本实施例以工业园区应用为例阐述。工业园区作为典型的多企业/多单元协同下的大型生产与物流一体化系统,在定制化需求下,由于客户订单的随机性、生产需求的动态性、外部资源的服务性及生产过程的低重复性,其运作过程不可避免地受到来自订单、资源、服务等方面的动态性干扰,由此,工业园区内部的“生产-运输-仓储”协同是极为重要的。在这样一个“生产-运输-仓储”协同的工业园区中,无论是从生产区到转运区(中转区/缓存区)(室内/室外),还是从转运区到仓储区(室外),都涉及到了任务分配的问题。如果把穿行其中的车辆看作机器人,那么这就是一个多机器人任务分配问题。有鉴于此,本实施例提供一种多机器人任务分配的“协商-决策”市场拍卖求解方法,使运输车队能够自组织地对工业园区内的运输任务进行分配执行。
具体的,通过以下步骤实现:
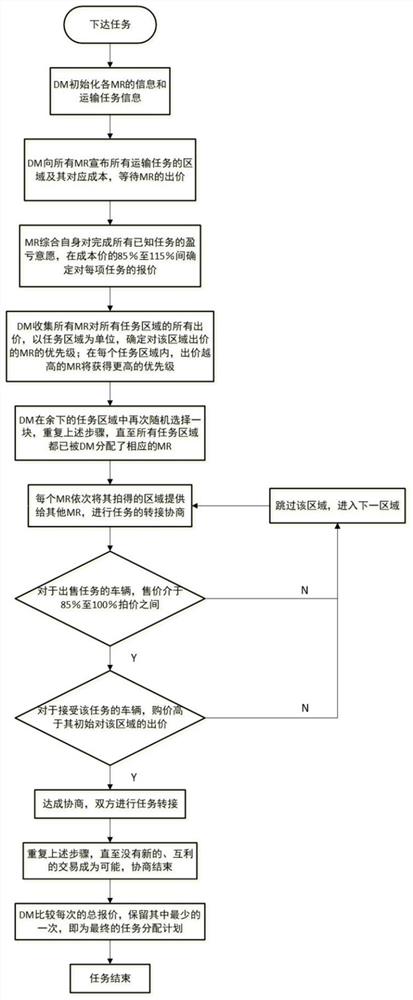
步骤S1:车队决策者机器人(以下简称DM)初始化各成员机器人(即成员车辆,以下简称MR)的信息和运输任务信息;
各MR的信息包括:车辆编号、车辆行驶单位成本;
初始化各区域运输任务信息,所述运输任务信息包括:区域编号、区域距离。
在本实施例中,各信息包括:MR编号i、DM编号i
在初始状态,DM知道所有区域的编号、距离以及各MR的单位行驶成本。
步骤S2:DM向所有MR宣布所有运输任务的区域及其对应成本,等待MR的出价;
步骤S3:MR综合自身对完成所有已知任务的拍下意愿,在成本价的85%至115%间确定对每项任务的报价;
成本价的85%至100%代表该MR希望通过付出低于成本的出价获得该任务,即对该任务的意愿度较低;
成本价的100%至115%代表该MR希望通过付出高于成本的出价获得该任务,即对该任务的意愿度较高。
此时,MRi对任务区域j的出价值bid的范围为:0.85*c
步骤S4:DM收集所有MR对所有任务区域的所有出价,以任务区域为单位,确定对该区域出价的MR的优先级;
在每个任务区域内,出价越高的MR将获得更高的优先级;
步骤S5:DM在所有任务区域中随机选择一块,为其匹配相应的MR来完成该任务;
该区域对应的优先级中最高的MR将成为该区域的拍得者,将获得该区域的任务完成运输权利;
步骤S6:DM在余下的任务区域中再次随机选择一块,重复步骤S5的过程;
重复步骤S6,直至所有任务区域都已被DM分配了相应的MR;
步骤S7:每个MR依次将其拍得的区域提供给其他MR,进行任务的转接协商;
达成转接任务的条件:对于出售任务的车辆,售价应处于85%至100%拍价。对于接受该任务的车辆,购价应高于其初始对该区域的出价;
即某一MR以价格A拍得某一任务区域,接着以价格C出售该区域给另一MR,这一MR在初始拍卖中对该任务区域的出价为B。
此时,价格A、B、C间的关系应为:A>C>B(A与C的关系:0.85A≤C≤A);
步骤S8:重复步骤S7,直至没有新的、互利的交易成为可能,协商结束;
在整个协商过程中,每次任务转接后的所有车辆总报价都要向DM汇报。
步骤S9:DM比较每次的总报价,保留其中最少的一次,对应的各区域任务分配方案即为最终的任务分配计划。该方法适用于上述多机器人任务分配的“协商-决策”市场拍卖求解系统。
本实施例在传统市场拍卖方法的基础上,加入了群体内部的成员协商功能和领导决策功能。各MR首先基于自身情况向DM汇报对各任务的出价,DM为这些出价制定优先级并分配任务,得到初始任务分配方案;接着MR在DM的监控下进行内部协商,对已有的任务相互转接;DM保存MR每次协商后的总成本,选择其中报价最低的那个,即为最终的分配方案.本实施例提供的上述方法最显著的优点是车队成员MR间可以自主协商,对初始分配的任务进行转接,同时车队内配有一名决策者DM,可以对每次协商转接后的总成本进行比较,最终选择成本最低的方案。这样的任务分配方法容易被执行,对团队的总成本降低也有很好的效果。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 多机器人任务分配的“协商-决策”市场拍卖求解方法
- 多市场主体动态博弈最优决策求解方法