一种基于电液可调焦镜头的移动目标三维轨迹追踪方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于计算机视觉领域,涉及移动目标追踪方法技术领域,具体涉及一种基于电液可调焦镜头的移动目标三维轨迹追踪方法。
背景技术
视觉目标追踪是人类最基本的视觉功能之一,同时也是计算机视觉领域最基础也是最重要的研究方向之一,持续受到包括神经科学和计算机科学在内的多学科研究工作者重点关注。但是目前的视觉目标追踪方法大多集中在二维图像平面上的追踪,对三维轨迹的追踪较少。但仅在二维平面上对目标进行追踪极大地限制了目标追踪技术的应用场景。
目前对视觉目标的三维轨迹追踪主要采用立体视觉的方法来实现,通过双目相机或多个相机,深度相机以及激光雷达等设备来恢复相机投影过程中丢失的深度信息,这些方法都具有结构复杂,设备成本较高的缺点,其中深度相机和激光雷达还受到其本身量程较小的限制,无法追踪较远处的目标。
发明内容
本发明的目的在于提供一种基于电液可调焦镜头的移动目标三维轨迹追踪方法。
基于上述目的,本发明采用如下技术方案:
一种基于电液可调焦镜头的移动目标三维轨迹追踪方法,包括如下步骤:
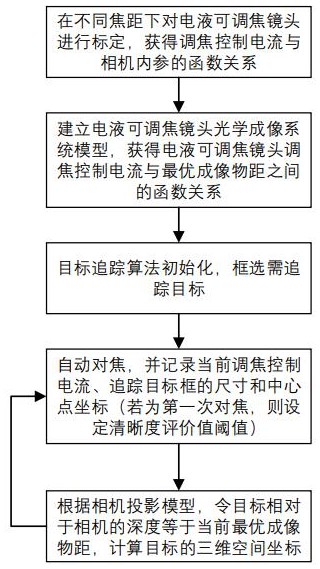
步骤1,在不同焦距下对电液可调焦镜头进行标定,获得调焦控制电流与相机内参的函数关系;
步骤2,建立电液可调焦镜头光学成像系统模型,获得电液可调焦镜头调焦控制电流与最优成像物距之间的函数关系;
步骤3,目标追踪算法初始化,生成追踪目标框并框选需追踪目标,追踪目标框作为后续对焦窗口;
步骤4,进行一次自动对焦,使图像中追踪目标框内清晰度评价值大于预设阈值K,记录对焦成功后的调焦控制电流I
步骤5,将调焦控制电流值I
步骤6,对同一追踪目标重复步骤4-5,将所记录的目标三维空间坐标按顺序连成轨迹,即为所追踪移动目标的三维轨迹。
进一步的,在步骤1中,电液可调焦镜头调焦控制电流与相机内参的函数关系建立过程为:在多个调焦控制电流下对电液可调焦镜头进行标定,通过曲线拟合获得调焦控制电流与相机内参的函数关系
(f
其中f
获取不随焦距值变化的相机内参c
进一步的,步骤2中电液可调焦镜头调焦控制电流与最优成像物距的函数关系建立过程为:
利用建模得到的可调焦镜头光学成像系统模型,记录多个调焦控制电流下的最优成像物距,并对记录的数据进行曲线拟合,可得到电液可调焦镜头的调焦控制电流与最优成像物距之间的关系:
u=F(I) (2)
其中u为最优成像物距,I为电液可调焦镜头的调焦控制电流。
进一步的,步骤4中所述自动对焦包括第一次自动对焦和后续自动对焦,第一次自动对焦过程为:(1)以一定步长t从初始调焦控制电流(焦距最短或最长时)开始搜索,并同时对追踪目标框内部图像区域计算清晰度评价值,获得清晰度评价值最大时的调焦控制电流I
K=αD
其中α为预设的清晰度置信度(α<1);K即为后续自动对焦时使用的预设清晰度评价阈值;
(2)对焦完成后记录图像中追踪目标框的尺寸size
后续自动对焦过程为:计算追踪目标框内部图像区域的清晰度评价值,记为D
进一步的,步骤4的去畸变为:根据选用的标定方法所使用的畸变模型,计算当前帧的去畸变图像,在去畸变后的图像(即去畸变图像)中读取并记录追踪目标框的中心点坐标(x
进一步的,步骤5中所述相机投影模型为:
其中,(x
进一步的,用Laplacian函数计算清晰度评价值,Laplacian函数的表达式为:
D(f)=∑
其中G(x,y)是像素点(x,y)处Laplacian算子的卷积,Laplacian算子为:
与现有技术相比,本发明具有以下有益效果:
本发明选用电液可调焦镜头,具有调焦响应速度快、能耗低、结构紧凑、重复定位精度高等优势,可实现快速精确对焦的特点;根据镜头的控制电流与焦距和最佳成像物距之间的相关性,通过对该镜头的光学成像系统建模,可得到电液可调焦镜头的焦距与最佳成像物距之间的函数关系,当经过自动对焦后的目标处于清晰状态时,可以利用该函数关系得到目标的深度信息,提供了一种新的追踪目标三维轨迹的方法。利用电液可调焦镜头保证目标始终处于清晰状态,将此时的最优成像物距作为目标相对于相机的深度,即可恢复目标在投影到相机成像平面过程中丢失的深度信息,从而实现结构简单,成本相对低廉的目标三维轨迹追踪。
本发明无需采用结构复杂,尺寸较大的立体视觉设备,只需单个相机即可实现对目标的三维轨迹追踪,且成本相对低廉。本发明在实现目标三维轨迹追踪的同时,还通过自动对焦使所追踪目标在图像中始终保持清晰状态,提高了所用目标追踪算法的稳定性,相对于现有技术是一个显著的进步。
附图说明
图1为本发明实施例1的流程图。
具体实施方式
实施例1
一种基于电液可调焦镜头的移动目标三维轨迹追踪方法,包括如下步骤:
步骤1,采用张正友标定法在不同焦距下对电液可调焦镜头进行标定,获得调焦控制电流与相机内参的函数关系;
电液可调焦镜头调焦控制电流与相机内参的函数关系建立过程为:在多个调焦控制电流下对电液可调焦镜头进行标定,获得对应的f
(f
其中f
同时获取不随焦距值变化的相机内参c
步骤2,采用Zemax软件建立电液可调焦镜头光学成像系统模型,并在Zemax软件中设置使用的电液可调焦镜头半径、厚度、曲率、材质等信息,获得电液可调焦镜头调焦控制电流与最优成像物距之间的函数关系;
电液可调焦镜头调焦控制电流与最优成像物距的函数关系建立过程为:利用Zemax软件建模得到的可调焦镜头光学成像系统模型记录多个调焦控制电流下的最优成像物距,并对记录的数据进行曲线拟合,可得到电液可调焦镜头的调焦控制电流与最优成像物距之间的关系:
u=F(I) (2)
其中u为最优成像物距,I为电液可调焦镜头的调焦控制电流。
步骤3,目标追踪算法初始化,框选需追踪目标,追踪目标框作为后续对焦窗口;其中,目标追踪算法一般可分为:一、相关滤波方法,如CSK,KCF/DCF,CN等;二、深度学习方法,如C-COT,ECO,DLT等;两类方法本发明均可选用,本实施例选用KCF算法。
步骤4,进行一次自动对焦,使图像中追踪目标框内清晰度评价值大于预设阈值K,记录对焦成功后的调焦控制电流I
自动对焦包括第一次自动对焦和后续自动对焦,第一次自动对焦过程为:(1)以一定步长t=(b-a)/1000从初始调焦控制电流(焦距最短或最长时的调焦控制电流)开始搜索,a为调焦控制电流最小值,b为调焦控制电流最大值,并同时对追踪目标框内部图像区域计算清晰度评价值,获得清晰度评价值最大时的调焦控制电流I
K=αD
其中α为预设的清晰度置信度(α<1);K即为后续自动对焦时使用的预设清晰度评价阈值。
清晰度评价值采用清晰度评价函数计算,清晰度评价函数可采用常用的SMD函数、EOG函数、Roberts函数、Tenengrad函数、Brenner函数、Laplacian函数或SML函数,为了便于理解,本实施例选用Laplacian函数计算,函数表达式为:
D(f)=∑
其中G(x,y)是像素点(x,y)处Laplacian算子的卷积,Laplacian算子为:
(2)对焦完成后记录图像中追踪目标框的尺寸size
后续自动对焦过程为:计算追踪目标框内部图像区域的清晰度评价值,记为D
去畸变为:根据选用的标定方法所使用的畸变模型,计算当前帧的去畸变图像,在去畸变图像中读取并记录追踪目标框的中心点坐标(x
张正友标定法所使用的径向畸变模型为
x
y
其中x
步骤5,将调焦控制电流值I
其中,(x
步骤6,对同一追踪目标重复步骤4-5,将所记录的目标三维空间坐标按顺序连成轨迹,即为所追踪移动目标的三维轨迹。
本发明无需采用结构复杂,尺寸较大的立体视觉设备,只需单个相机即可实现对目标的三维轨迹追踪,且成本相对低廉。本发明在实现目标三维轨迹追踪的同时,还通过自动对焦使所追踪目标在图像中始终保持清晰状态,提高了所用目标追踪算法的稳定性,相对于现有技术是一个显著的进步。
实施例2
与实施例1相比,本实施例在步骤4中,直接调用OpenCV的去畸变函数,传入标定获得的畸变参数k
- 一种基于电液可调焦镜头的移动目标三维轨迹追踪方法
- 一种基于电液可调焦镜头的移动目标实时自动对焦方法